







力传感器校准(标准 ISO376)
校准通常被描述为被测传感器测量结果与校准标准的比较。这意味着,在加载一定力时,了解力传感器的输出信号,以及在该力阶跃下传感器的不确定性。
对于力传感器,有两种校准方法:
- 用砝码加载力传感器
- 使用电动执行器加载,并使用高精度力传感器测量实际产生的力

ISO 376 标准定义了什么?
- 测试程序(预加载和加载步级)
- 根据校准过程中记录的原始数据计算的特征值(额定输出、滞后、重复性等)及其计算方法
- 每个荷载阶跃(以及两者之间的力),在不同情况下(增大或增大和减小力)下力传感器的不确定性
- 每个荷载阶跃和量程下力传感器的等级
测试程序
1、预加载
每次ISO 376校准都需要对传感器预加载三次,每次都会以最大校准力施加预加载。
2、在载荷阶跃中,测量两次增加载荷
在测试程序的下一阶段中,传感器的负载将达到最大校准力,并分八到十步增加负载。卸载后,在不变的安装位置重复相同的步骤。换言之,称重传感器在校准机内保持不变,并再次重复相同的加载步骤。
3、在不同安装位置测量
完成后,拆下传感器,旋转120°并重新安装在校准机中。使用最大校准力预加载后,前一阶段的加载步骤再次重复施加到传感器上,直至达到最大校准力,然后以相同的间隔卸载。请注意,减小力时使用的载荷阶跃与增大力的载荷阶跃相同。这与测试程序的前两个阶段不同,在这两个阶段中,传感器从最大校准力卸载到零。
第二次拆卸传感器后,再次将其旋转120°,并完全预加载至最大校准力。然后,使用上述测试前一部分相同加载步骤再次加载和卸载。
4、蠕变测量
再次卸载传感器后,程序的最后一步是蠕变测量。
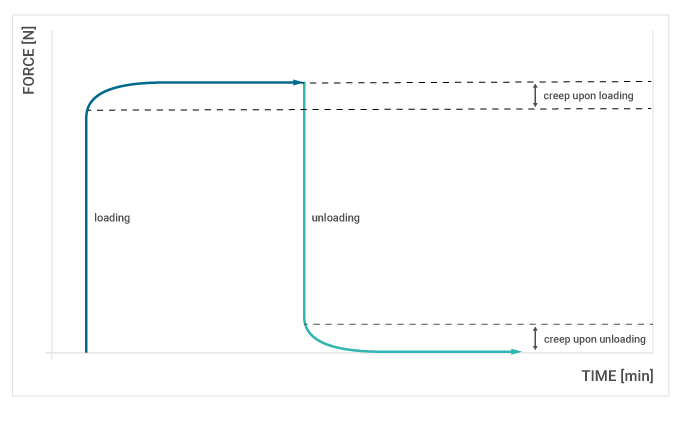
图1:力传感器蠕变示意图
5、校验记录
所有校准记录详细显示了每个测量行的结果:
- 首次运行:增加力
- 第二次运行:增加力,无旋转
旋转 120°
- 第三次运行: 增加力
- 第三次运行: 从 R3,的最高负载开始减小力
旋转 120°
- 第四次运行: 增加力
- 第四次运行: 从 R5,的最高负载开始减小力
蠕变测量
结果:特征值
为了能够比较不同的力传感器并将其分配到适当的精度等级,必须确定和评估每个传感器和每个载荷阶跃的特征值。根据上述测试程序计算以下参数:
-
重复性:安装位置不变时输出信号的差异
-
再现性:描述不同安装位置相同负载步级下输出信号的差异
-
插值误差:插值误差表示传感器的真实特性曲线与拟合曲线之间的差异
-
可逆性/滞后:描述在某一负载阶跃下增加和减少负载之间的输出信号差异
-
蠕变误差:表示恒定负载下输出信号的变化
-
零点误差:表示加载/卸载循环前后零点的偏差


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









