







**单片机设计介绍,基于51单片机自行车码表霍尔测速里程计超速报警系统
一 概要
基于51单片机自行车码表霍尔测速里程计超速报警系统概要如下:
一、系统概述
该系统是一个结合了51单片机技术和霍尔传感器技术的自行车码表系统,旨在提供精确的骑行速度、里程测量,并具备超速报警功能。这一系统不仅增强了骑行的安全性,也为骑行者提供了便捷的骑行数据监测方式。
二、核心组成与技术参数
核心控制器:采用51单片机作为系统的“大脑”,负责数据处理和控制逻辑的执行。
测速传感器:使用霍尔传感器,安装在自行车车轮上,每转一圈输出一个脉冲信号,实现精确测速。
显示模块:通常配备LCD显示屏或LED数码管,用于实时显示速度、里程等骑行数据。
报警模块:当骑行速度超过预设的安全阈值时,会发出声光报警信号,提醒骑行者减速。
三、功能特点
精确测量:通过霍尔传感器精确捕捉车轮的转动情况,实现速度和里程的准确计算。
实时显示:骑行者可以随时查看当前的骑行速度和累计里程。
超速报警:系统具备超速报警功能,有效提醒骑行者控制速度,确保骑行安全。
稳定可靠:51单片机和霍尔传感器的结合保证了系统的稳定性和可靠性。
四、应用场景与价值
该系统适用于各类自行车,特别是需要精确监测骑行数据的运动型自行车。通过实时反馈骑行数据,帮助骑行者更加科学、安全地进行骑行训练或日常通勤。同时,超速报警功能有效提升了骑行过程中的安全性,防止因超速而引发的潜在风险。
综上所述,基于51单片机自行车码表霍尔测速里程计超速报警系统为骑行者提供了一个集测速、里程计算和超速报警于一体的解决方案,旨在提升骑行的安全性和便捷性。
二、功能设计
本系统由STC89C52单片机核心、DS1302时钟、5V电机调速控制、霍尔测速、蜂鸣器报警、按键、LCD1602液晶显示及电源组成。
1、通过时钟芯片DS1302获取时间。
2、LCD1602可以显示当前的速度,里程,时间。
3、按键功能:从左边第一个起,减键、加键、选择键、设置键。
4、可以通过电位器对电机进行调速。
5、具有超速报警功能,可以设置报警速度,当实际的速度大于当
前的速度时就会由蜂鸣器产生报警。
6、可以查看总路程,并且可以对总路程进行清零操作。
7、按键修改当前的时间。
设计思路
设计思路
文献研究法:搜集整理相关单片机系统相关研究资料,认真阅读文献,为研究做准备;
调查研究法:通过调查、分析、具体试用等方法,发现单片机系统的现状、存在问题和解决办法;
比较分析法:比较不同系统的具体原理,以及同一类传感器性能的区别,分析系统的研究现状与发展前景;
软硬件设计法:通过软硬件设计实现具体硬件实物,最后测试各项功能是否满足要求。
三、 软件设计
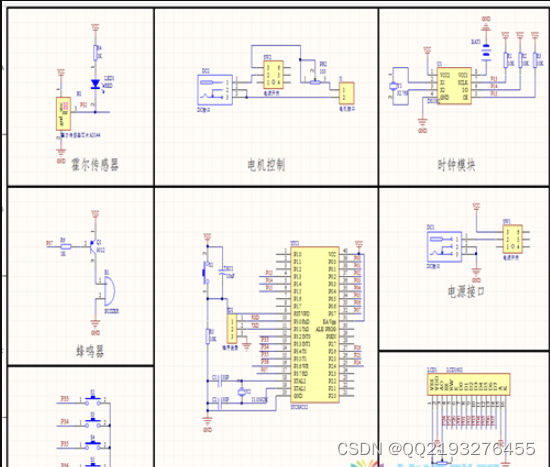
本系统原理图设计采用Altium Designer19,具体如图。在本科单片机设计中,设计电路使用的软件一般是Altium Designer或proteus,由于Altium Designer功能强大,可以设计硬件电路的原理图、PCB图,且界面简单,易操作,上手快。Altium Designer19是一款专业的整的端到端电子印刷电路板设计环境,用于电子印刷电路板设计。它结合了原理图设计、PCB设计、多种管理及仿真技术,能够很好的满足本次设计需求。
————————————————
仿真实现
本设计利用protues8.7软件实现仿真设计,具体如图。
Protues也是在单片机仿真设计中常用的设计软件之一,通过设计出硬件电路图,及写入驱动程序,就能在不实现硬件的情况进行电路调试。另外,protues还能实现PCB的设计,在仿真中也可以与KEIL实现联调,便于程序的调试,且支持多种平台,使用简单便捷。
————————————————
原理图
五、 程序
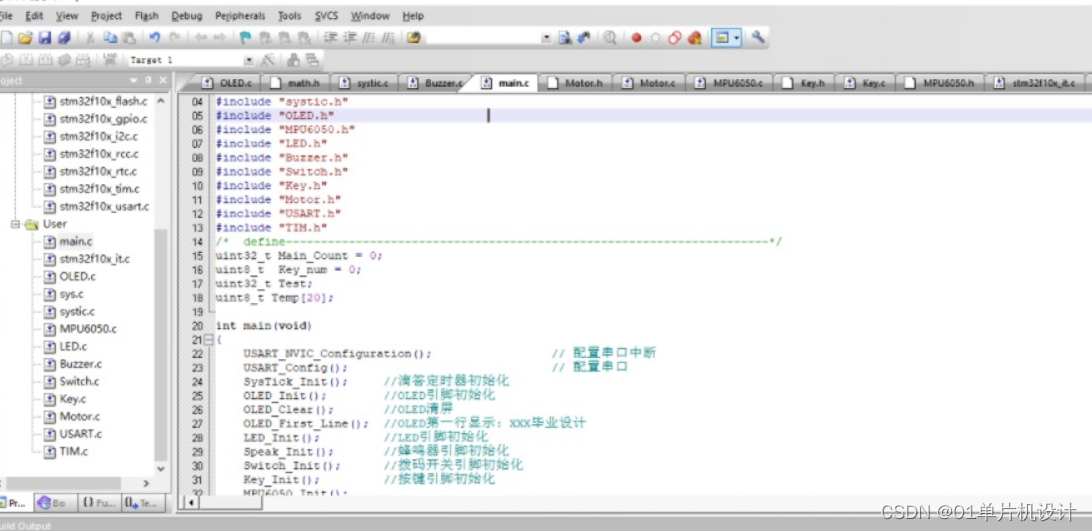
本设计利用KEIL5软件实现程序设计,具体如图。作为本科期间学习的第一门编程语言,C语言是我们最熟悉的编程语言之一。当然,由于其功能强大,C语言是当前世界上使用最广泛、最受欢迎的编程语言。在单片机设计中,C语言已经逐步完全取代汇编语言,因为相比于汇编语言,C语言编译与运行、调试十分方便,且可移植性高,可读性好,便于烧录与写入硬件系统,因此C语言被广泛应用在单片机设计中。keil软件由于其兼容单片机的设计,能够实现快速调试,并生成烧录文件,被广泛应用于C语言的编写和单片机的设计。
————————————————

六、 文章目录
目 录
摘 要 I
Abstract II
引 言 1
1 控制系统设计 2
1.1 主控系统方案设计 2
1.2 传感器方案设计 3
1.3 系统工作原理 5
2 硬件设计 6
2.1 主电路 6
2.1.1 单片机的选择 6
2.2 驱动电路 8
2.2.1 比较器的介绍 8
2.3放大电路 8
2.4最小系统 11
3 软件设计 13
3.1编程语言的选择 13
4 系统调试 16
4.1 系统硬件调试 16
4.2 系统软件调试 16
结 论 17
参考文献 18
附录1 总体原理图设计 20
附录2 源程序清单 21
致 谢 25















 9070
9070

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









