







无人机杂草检测论文代码
**《基于深度学习的无人机正射影像杂草实例分割》
UAV-weed-detection-paper
数据获取
数据集可在[Zonedo平台]获取
数据集说明
- annotation_json_raw/
原始标注文件(由Anylabeling生成) - yolo_format/
YOLO训练格式数据(通过code/yolo/json2yolo.py转换)SR&SR_multi/:经Real-ESRGAN和Waifu2x-Extension-GUI超分辨率重建的数据
- maskrcnn_format/
Mask RCNN训练格式数据(通过json2coco.zip内脚本转换) - plots_img/
地块样本图像(从正射影像裁剪,尺寸1000×3000像素)
训练与预测
- YOLOv8:基于Ultralytics框架训练
- Mask RCNN:基于Detectron2框架训练
(注:Mask RCNN权重文件过大,已通过Release发布)
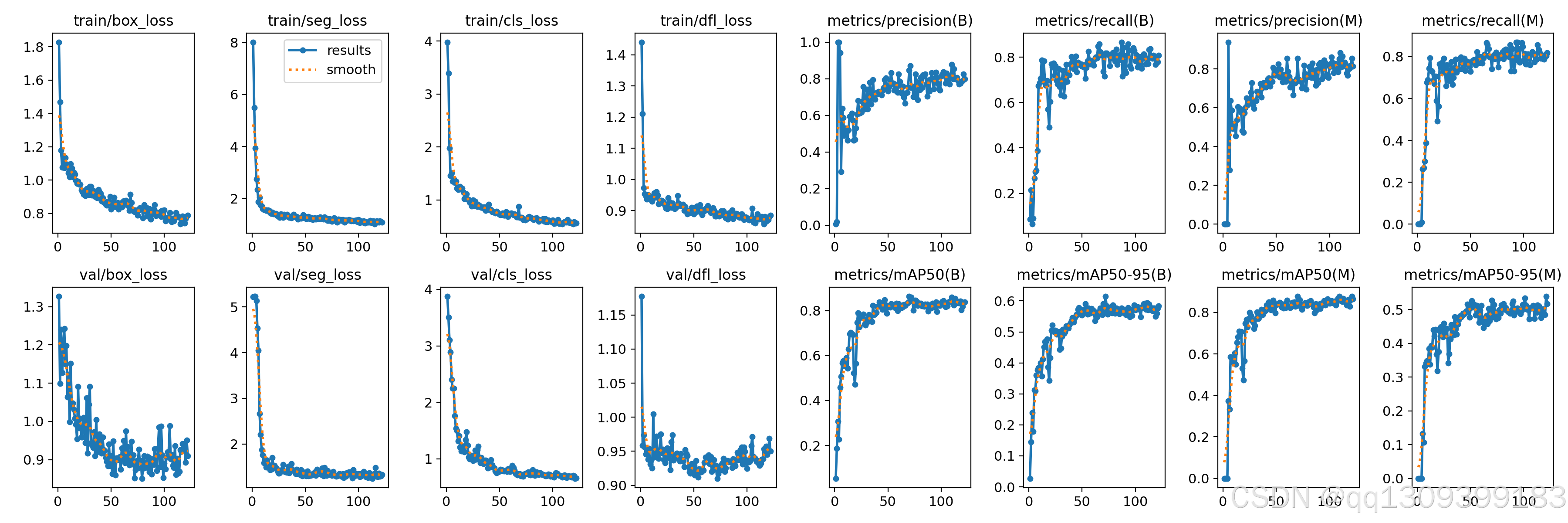
实验结果
包含训练权重、参数和评估结果:
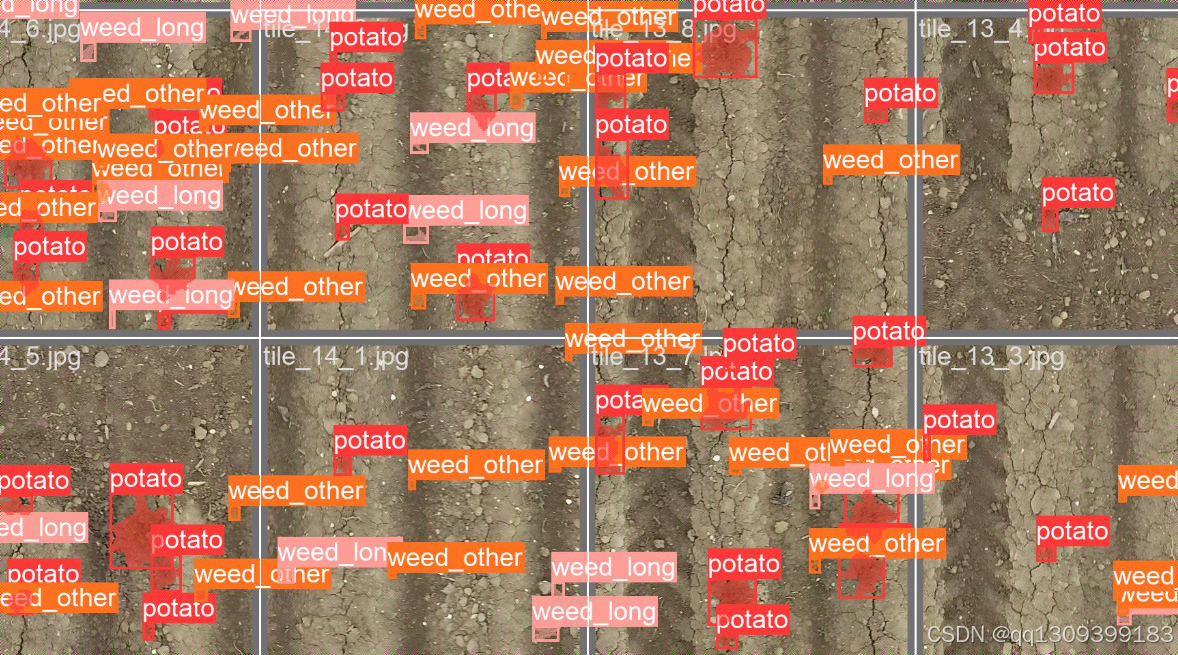
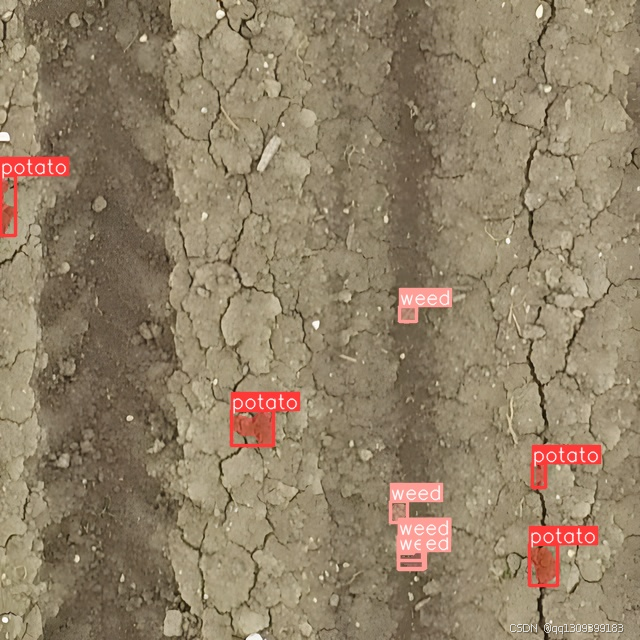
- results/yolo/predict/predict_plots_both/
使用results/yolo/train/SR/weights/best.pt权重预测的结果- 通过YOLOv8分割每个地块的马铃薯和杂草
labels/内.txt文件包含各目标坐标信息- 使用
code/yolo/mask_area.py计算马铃薯/杂草覆盖面积
- 统计分析
通过code/yolo/regression.py进行多元线性回归
(注:保留专业术语如YOLO/Mask RCNN/Detectron2等英文原名,关键路径保持原格式,超分辨率工具名维持英文专业表述)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









