






基于YOLO算法的行人横道线检测技术研究
一、引言
随着计算机视觉技术的快速发展,目标检测在交通管理、自动驾驶等领域发挥着越来越重要的作用。行人横道线作为城市道路交通的重要组成部分,其准确检测对于保障行人安全、提高交通效率具有重要意义。YOLO(You Only Look Once)作为一种高效的目标检测算法,因其检测速度快、准确率高等优点,在行人横道线检测领域展现出巨大潜力。本文将详细探讨基于YOLO算法的行人横道线检测技术原理、实现方法及应用价值。
二、YOLO算法基本原理
YOLO算法是一种基于深度学习的单阶段目标检测方法,其核心思想是将目标检测任务转化为回归问题,通过单次前向传播即可完成图像中多个目标的定位和分类。
-
网络架构:YOLO采用全卷积神经网络架构,主要由特征提取网络和检测网络组成。YOLOv3及以上版本使用Darknet作为主干特征提取网络,通过多尺度特征融合提高检测精度。
-
检测机制:YOLO将输入图像划分为S×S的网格,每个网格预测B个边界框及其置信度和C个类别概率。通过非极大值抑制(NMS)去除冗余预测,得到最终检测结果。
-
损失函数:YOLO的损失函数包括定位损失(边界框坐标)、置信度损失和分类损失三部分,通过加权求和进行联合优化。
三、行人横道线检测的技术实现
基于YOLO的行人横道线检测系统主要包括数据准备、模型训练和检测应用三个阶段。
1. 数据准备与标注
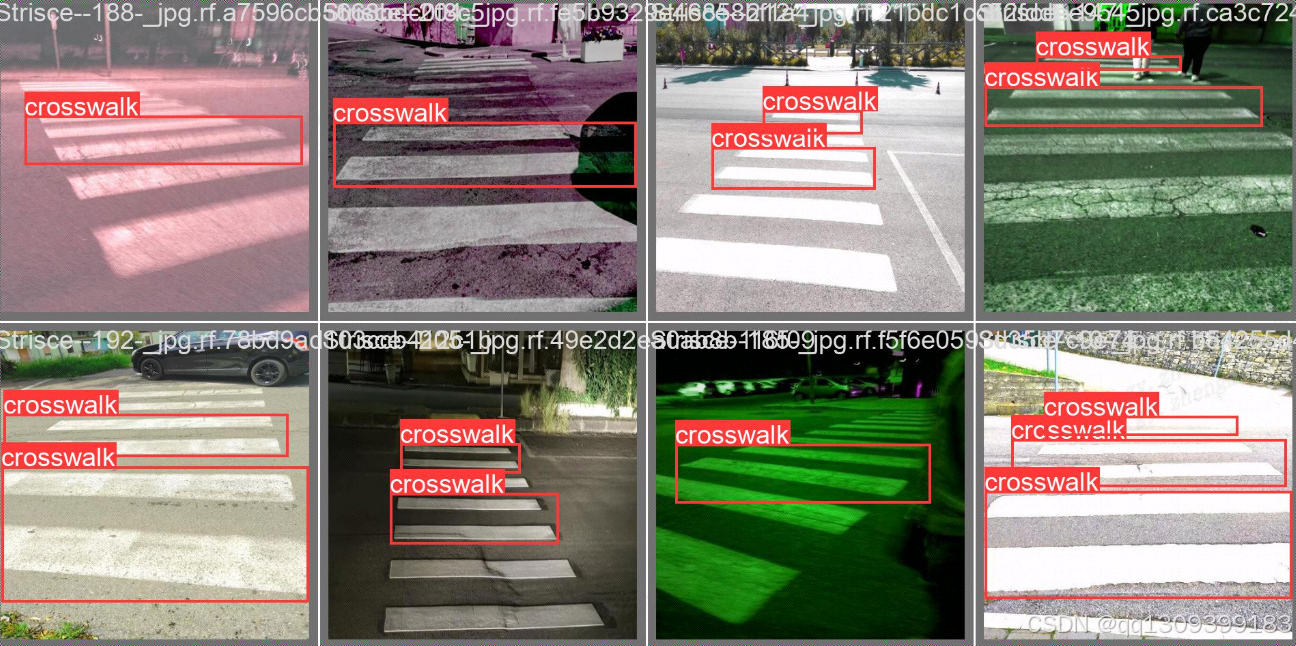
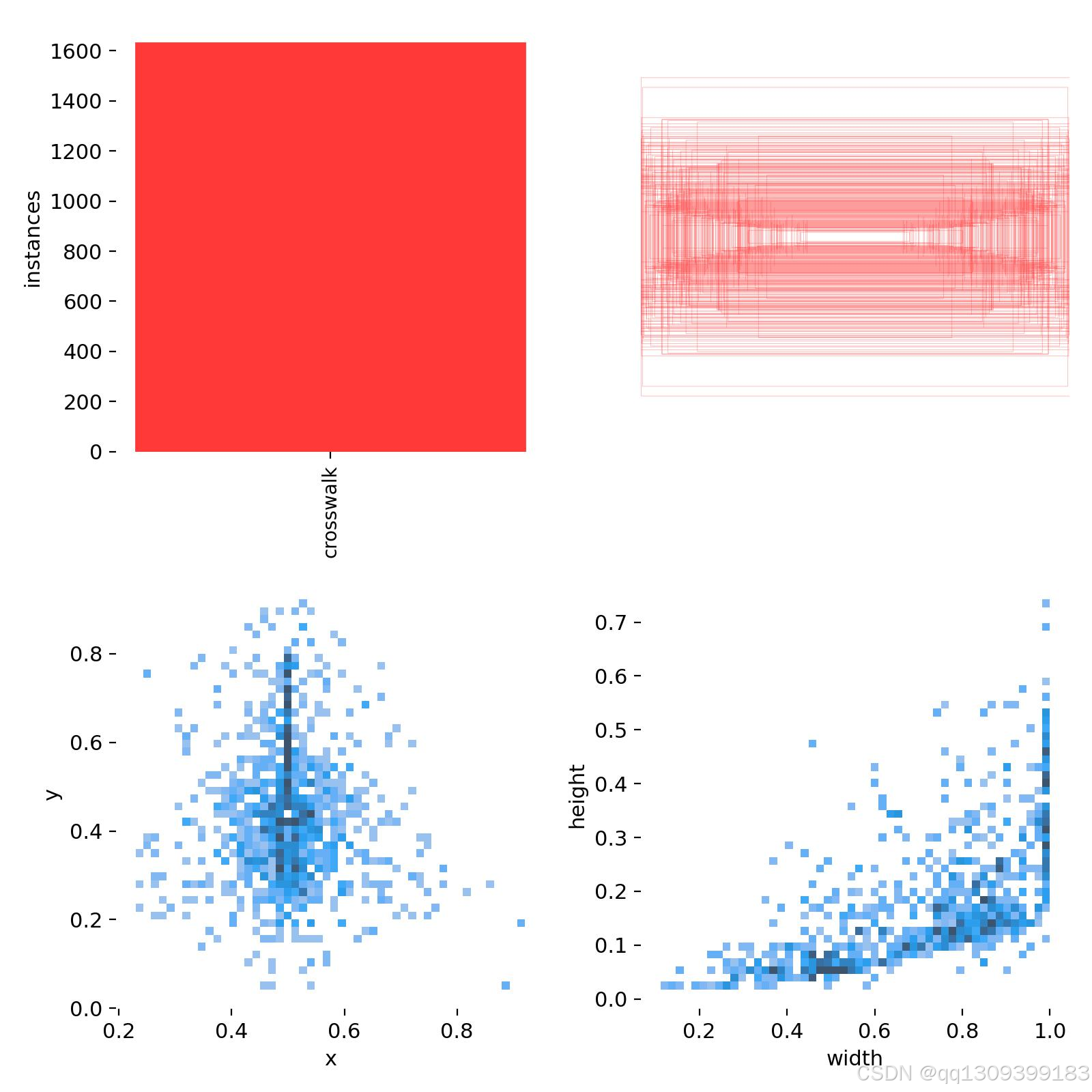
高质量的数据集是模型性能的基础。行人横道线检测需要收集包含各种场景(城市道路、校园、商业区等)、不同光照条件(白天、夜晚、雨雪等)和多种视角的图像数据。使用标注工具(如LabelImg)对图像中的行人横道线进行边界框标注,生成符合YOLO格式的标注文件。
数据增强技术可有效提高模型泛化能力,常用方法包括:
- 几何变换:随机旋转、缩放、裁剪
- 颜色变换:亮度、对比度、饱和度调整
- 复杂场景模拟:添加噪声、模糊、雨雪效果
2. 模型训练与优化
YOLO模型的训练过程包括以下关键步骤:
-
模型选择:根据硬件条件和实时性要求选择合适的YOLO版本。YOLOv5s适合资源受限设备,YOLOv8x则提供更高精度。
-
参数配置:设置合适的初始学习率、批量大小、训练轮次等超参数。采用学习率预热和余弦退火策略优化训练过程。
-
迁移学习:在预训练模型基础上进行微调,可显著提高训练效率和检测精度。冻结部分网络层可减少计算量。
-
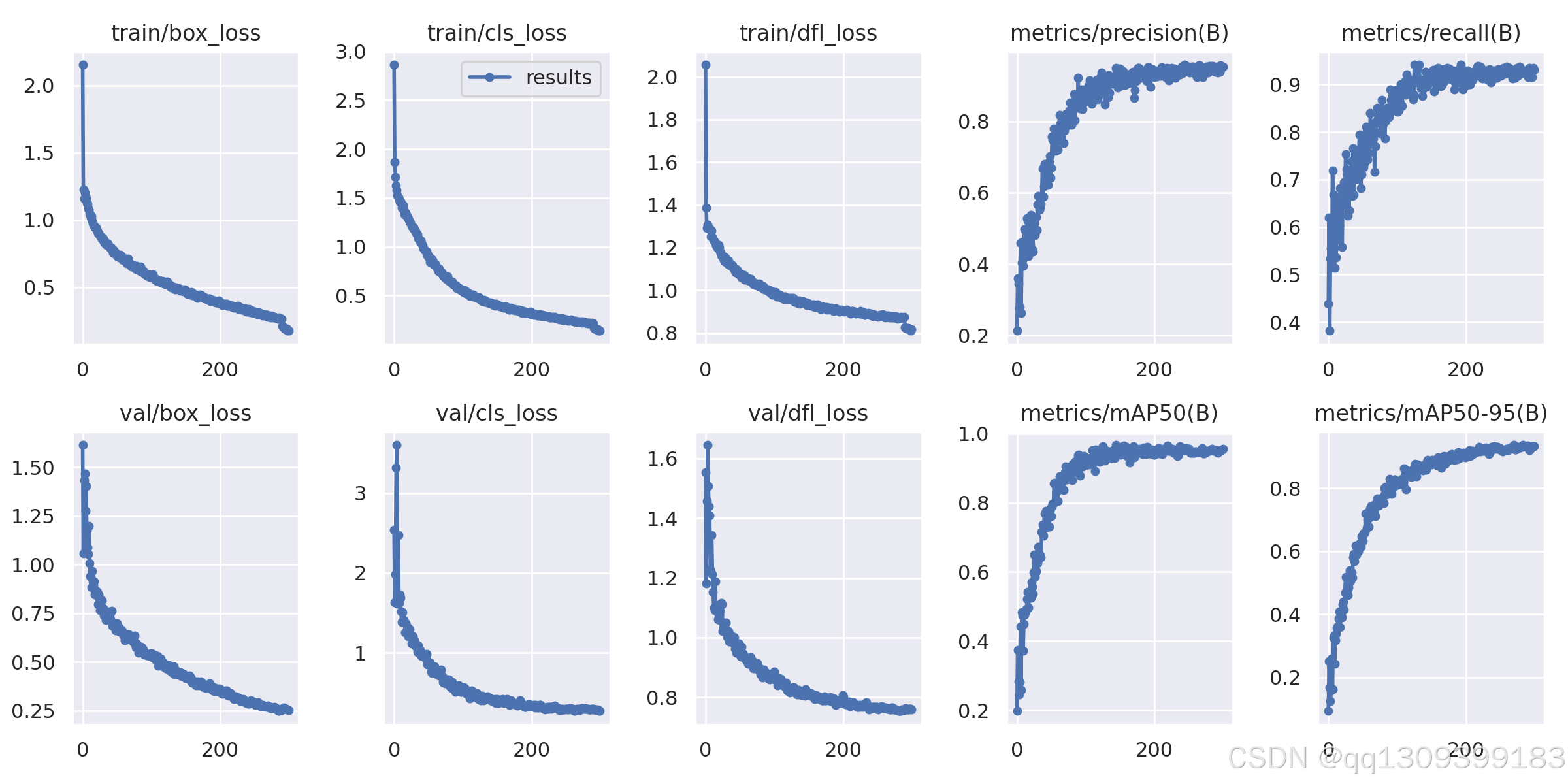
模型评估:使用mAP(mean Average Precision)、FPS(Frames Per Second)等指标评估模型性能。通过混淆矩阵分析模型在不同场景下的表现。
3. 检测应用与后处理
训练完成的YOLO模型可部署到实际应用中,检测流程包括:
-
图像预处理:将输入图像调整为模型要求的尺寸,进行归一化处理。
-
推理检测:模型输出包含行人横道线位置和置信度的预测结果。
-
后处理:应用非极大值抑制去除重叠检测框,设置置信度阈值过滤低质量预测。
-
结果可视化:在原图上绘制检测框,可根据需求添加距离估计、行人计数等扩展功能。
四、技术挑战与解决方案
在实际应用中,基于YOLO的行人横道线检测面临多项挑战:
-
复杂场景干扰:阴影、积水反光、部分遮挡等因素会影响检测效果。解决方案包括:
- 使用注意力机制增强特征提取能力
- 引入多尺度训练和测试
- 融合红外或深度传感器数据
-
小目标检测:远距离行人横道线在图像中占比小,易被漏检。可采取:
- 采用特征金字塔网络(FPN)结构
- 提高输入图像分辨率
- 专门设计小目标检测层
-
实时性要求:针对边缘设备部署,可进行:
- 模型量化(8位整数量化)
- 网络剪枝和知识蒸馏
- 使用TensorRT等推理加速框架
五、应用前景与展望
基于YOLO的行人横道线检测技术在多个领域具有广泛应用价值:
-
智能交通系统:实时监测行人过街情况,优化交通信号灯控制策略,提高路口通行效率。
-
自动驾驶:为自动驾驶车辆提供行人横道线位置信息,辅助决策系统实现礼让行人功能。
-
智慧城市:结合视频监控系统,统计分析行人流量和过街行为,为城市规划和道路设计提供数据支持。
-
辅助驾驶:在车载系统中实现行人横道线预警功能,提醒驾驶员注意行人安全。
未来发展方向包括:
- 结合Transformer架构提高检测精度
- 开发轻量化模型适应边缘计算设备
- 实现多模态融合检测(视觉+激光雷达)
- 构建大规模标准化行人横道线数据集
六、结语
基于YOLO算法的行人横道线检测技术以其高效、准确的特性,在智能交通和计算机视觉领域展现出广阔的应用前景。随着算法不断优化和硬件计算能力提升,该技术将在保障行人安全、提高交通效率方面发挥更加重要的作用。未来的研究应继续关注复杂场景下的鲁棒性提升和实际部署的工程优化,推动技术从实验室走向大规模实际应用。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









