







注:该内容由“数模加油站”原创,无偿分享,可以领取参考但不要利用该内容倒卖,谢谢!
A:多人蹦床运动动力学与疲劳寿命优化
题 目 空中定格:跳跃之中的力学秘密与策略艺术
摘要
本文聚焦于系统探讨蹦床运动中“前空翻起跳—空中翻转—落地缓冲—多人协同”全过程中的物理机制与控制策略,针对竞技训练中动作完成难度高、冲击强度大、结构疲劳积累快等关键挑战,构建了从单人动力学建模到多人体协同优化的全链条数学模型。通过引入非线性动力学系统建模、弹性响应耦合分析、生理极限约束机制与智能优化算法嵌套的多层建模框架,本文在理论推导与数值仿真基础上,提出一套具有可落地性的智能发力控制与疲劳风险最小化策略,为运动动作策略优化与设备可靠性提升提供了多角度支撑。 针对问题一:本文围绕起跳过程中的动力学行为建模展开,首先构建基于欧拉-拉格朗日方程的人体躯干旋转模型,耦合蹦床弹性反馈与人体肌肉 Hill 模型约束,形成完整的非线性动力系统。在此基础上,本文提出一种融合“物理可行性判别机制、动作经验演化机制与扰动鲁棒性评估机制”的灰狼优化算法(PA-GWO-EL),用于求解最小能耗、最大动作完成度与抗扰动能力最强的三维发力参数组。通过四阶 Runge-Kutta 法对角速度-位移系统与垂直运动系统进行联合时域数值积分,仿真验证表明该策略可确保在运动员生理能力范围内完成完整翻转动作,并具备显著的姿态容错性与鲁棒性。 针对问题二:本部分研究聚焦于运动员离网后的飞行与落地阶段,特别是空气阻力作用与蹦床接触响应对落地冲击力的影响。首先构建考虑迎风面积动态变化的阻力模型与非线性弹性接触系统,引入状态驱动的模糊控制器调节空中姿态展开速度,通过调节空气阻力实现落地减速与冲击缓冲。进一步构建基于起跳高度与姿态调控因子的二元敏感性响应面,系统分析其对落地速度与最大接触力的影响规律。仿真结果显示:合理控制空中展开策略可使落地冲击降低15%以上,接触时间延长超过10%,显著改善能量吸收特性,有效防止剧烈应力集中与运动损伤。 针对问题三:本文扩展至多名运动员协同使用同一蹦床的情景,构建了涵盖局部刚度差异、响应时滞与落地时序排斥机制的多输入-多状态耦合模型。结合 Miner 疲劳准则,建立结构损伤指数评价体系,通过引入蚁群算法(ACO)进行路径搜索、再结合模拟退火算法(SA)进行起跳时刻微调,在满足落地互斥的同时最小化整体疲劳指数。优化结果显示:相较等间隔起跳策略,本文方案可降低结构疲劳指标约37%,延长设备使用寿命超过50%,且显著降低最大局部冲击力与其波动标准差,实现“重者后跳、轻者先起”的合理调度结构。相关策略具备良好的可解释性、可实现性与工程推广潜力。 综上所述,本文围绕竞技型蹦床运动中运动员动作策略优化与设备疲劳管理的双重目标展开研究,涵盖起跳控制、空中缓冲、落地冲击与协同调度四大关键环节。通过建立融合非线性动力学、生理约束、模糊控制与群体智能优化算法的多层次建模体系,系统刻画了动作完成机制、冲击缓解路径与疲劳削减策略之间的物理与数学联系。本文模型不仅可用于专业运动训练方案优化,还可扩展用于蹦床设计改进、健身训练模拟、人机交互仿真等多个实际应用场景,具备良好的推广应用价值与跨场景适应能力。
关键词:PA-GWO-EL,四阶Runge-Kutta法,模糊控制,Miner 疲劳准则,蚁群模拟退火
一、 问题重述
1.1 问题背景1.1 问题背景
蹦床运动作为一项集腾跃、翻转、旋转于一体的高难度体操项目,对人体运动控制精度与力量释放协调性提出了极高要求[1] 。随着该项目在国际赛事中的普及与竞技水平不断提升,如何科学优化起跳动作、控制空中姿态以及安全落地,已成为提升运动表现与减少运动损伤风险的重要研究方向。特别是在前空翻这类高难度动作中,运动员需要在极短时间内完成力量转换、角动量建立与姿态控制等一系列复杂过程,稍有偏差便可能导致落地失稳或动作失败[2] 。
在训练场景与团体竞技中,多个运动员往往需要共享同一器械,这进一步引发了设备疲劳积累、多人协同干扰及落地时序冲突等工程与安全性问题[3] 。另一方面,人体在蹦床运动中的运动行为不仅受到生理因素限制,还受到器械结构参数(如弹性分布、局部刚度)的高度影响,呈现出强烈的非线性耦合特性。因此,深入理解这一类高动态交互系统中的物理过程与响应机制,对于优化训练策略、延长器械使用寿命、提升竞技安全性具有重要意义[4] 。
近年来,随着生物力学测量技术和计算模拟能力的提升,越来越多的研究开始关注运动行为背后的微观力学规律及其可控性特征[5] 。在此背景下,如何在有限生理能力与实际设备条件下,实现对动作精度、冲击缓冲和疲劳分布的全流程管控,成为融合运动科学、工程控制与系统优化等多学科交叉的重要研究课题[6] 。
1.2 问题提出1.2 问题提出
问题一:分析运动员在蹦床上完成前空翻动作时的起跳过程,建立动力学模型,设计满足动作完成条件的合理发力策略,并在满足生理限制的前提下,实现较小能耗与较高动作稳定性。
问题二:分析运动员从蹦床起跳到落地的全过程,在考虑空气阻力与弹性恢复力影响的基础上,建立系统动力学模型,并提出可用于减小落地冲击的姿态控制策略。
问题三:在多人协同使用蹦床的情境下,分析运动员起跳与落地时序对结构疲劳的影响,建立疲劳评估指标,设计合理的起跳调度方案以最小化整体疲劳损伤。
二、 问题分析
问题一分析:问题一关注的是运动员在蹦床上完成前空翻动作的起跳阶段。该过程涉及人体下肢肌群的力量释放、躯干的旋转控制以及弹性介质(蹦床)对人体反作用力的传递与耦合。动作成败依赖于发力大小、方向、时间以及姿态角度的精密配合。由于人体本身是非刚性系统,肌肉力量存在生理上限,且发力行为受神经-肌肉控制机制调节,因此本问题在建模时需同时考虑非线性动力学系统和生理约束条件。此外,动作完成度不仅取决于力学指标,还受到扰动响应的影响,因此鲁棒性控制亦是关键。本问题的核心在于建立一套可以预测和优化发力策略的动力学模型,并在能量代价、动作成功率与稳定性之间实现权衡。
问题二分析:问题二要求分析运动员在离网后的飞行与落地阶段的受力变化与运动行为,并提出有效缓冲冲击的控制策略。该过程主要受到重力和空气阻力的影响,运动员在空中状态下的姿态调整将直接改变迎风面积,进而调节下降速度和落地冲击强度。落地阶段与蹦床的接触行为具有显著的非线性弹性特征,恢复力大小受压缩位移与局部刚度的双重影响,常伴随结构响应迟滞现象。同时,为防止运动损伤和提升运动舒适度,需控制冲击峰值并延长受力时间,从而实现“柔性着陆”。因此,该问题不仅包含经典的自由落体受阻模型,还引出了非线性接触建模与姿态控制策略的设计问题,强调动力学行为与控制响应的耦合关系。
问题三分析:问题三引入了多人协同弹跳的复杂场景,要求综合分析多名运动员起跳与落地时序对蹦床结构疲劳累积的影响。在这一背景下,不同运动员的体重、站位刚度与起跳时刻构成一个多变量非对称系统,而蹦床的响应呈现显著的时间延迟与空间不均匀性。频繁高幅的冲击会使局部区域结构应力超限,导致材料疲劳甚至损伤。关键在于如何调度每位运动员的起跳时刻,使所有人动作不冲突(避免落地重叠),并在此基础上最小化系统整体疲劳程度。这一问题融合了疲劳物理建模、时间序列调度与组合优化,是多约束下的调度控制与系统安全评估的典型交叉问题,兼具工程应用价值与理论挑战性。
三、 模型假设与符号说明
3.1 模型基本假设3.1 模型基本假设
(1)人体建模假设:假设运动员在建模过程中可被视为质量集中分布的单刚体或质量点模型,忽略四肢局部形变,仅考虑整体质量、腿长、重心高度、转动惯量等关键物理参数。
(2)蹦床结构假设:蹦床床面视为具有位置相关弹性刚度分布的非线性弹性体,局部刚度在题目中已知且不随使用时间变化;弹性响应主要为竖直方向恢复力,横向位移可忽略。
(3)空气阻力假设:空气阻力按标准二次速度模型计算,阻力大小与运动员的迎风面积成正比,空气密度视为常数;迎风面积受姿态控制参数 λ 调节,视为时间或状态的连续函数。
(4)肌肉生理约束假设:运动员下肢发力过程受限于 Hill 模型所描述的“力-速关系”,即收缩速度越快,能输出的蹬力越小。肌肉爆发力上限为固定值,不随时间和动作阶段变化。
(5)空中翻转假设:离网后的角速度视为常数(角动量守恒),在空中不受外力矩影响;翻转动作仅围绕一轴完成,忽略姿态偏移和俯仰角扰动。
(6)非线性弹性响应假设:落地接触过程中蹦床产生的恢复力为非线性弹性力,包含一次项与三次项,且具有材料“硬化”特性,压缩响应过程中不考虑黏性阻尼影响。
(7)模糊控制假设:姿态调控策略依据实时速度、加速度及高度变化决定展开速度 λ,模糊规则与权重设定为静态规则,不进行在线学习或自适应调整。
(8)多运动员协同假设:所有运动员在起跳与落地过程中不发生重叠,落地期间不得有其他人落地或起跳;每名运动员的起跳、飞行与落地时间依据个体参数确定,视为可调但不可相互替代。
(9)疲劳建模假设:结构疲劳损伤累积过程遵循 Miner 线性损伤理论的改进形式,单次应力峰值越大,疲劳贡献越显著,疲劳指数与受力幅值呈非线性幂函数关系。
(10)优化算法假设:灰狼优化算法、模拟退火算法与蚁群算法在收敛过程中满足群体多样性和解空间充分探索的前提;所有搜索变量在定义域内变化,所有搜索结果满足物理可行性判定后方可被接受。
3.2 符号说明
符号说明
四、 面向动作完成与稳定性的蹦床前空翻起跳建模与智能发力控制策略
4.1 技术背景与动作需求分析
蹦床运动中的“前空翻”是一个结合了竖直腾跃高度与身体旋转能力的典型复杂动作。其成败不仅取决于起跳瞬间的速度和角动量,还高度依赖于身体姿态、发力策略、蹦床系统响应以及人体生理极限。在竞赛环境中,运动员常通过反复训练寻找“最优起跳方式”,以实现最小能耗、最大翻转成功率和落地稳定性。
前空翻的完成过程可以划分为四个阶段:
1.网面接触—压缩阶段:运动员下落接触网面,弹簧系统开始储能;
2.蹬伸—力矩驱动阶段:腿部肌肉主动发力,人体获得向上加速度和旋转力矩;
3.离网—自由飞行阶段:离网瞬间角动量与线动量共同决定空中运动轨迹;
4.翻转—姿态保持阶段:角动量守恒支配翻转持续,直到下落回网。
本文将围绕“如何在有限时间与生理约束下完成标准前空翻”为核心目标,构建融合非线性刚体动力学、弹性耦合响应、肌肉生理模型、智能优化算法与鲁棒性分析的完整建模框架。
4.2 起跳阶段的多层物理建模框架构建
4.2.1躯干旋转的非线性动力控制模型
在起跳过程中,人体躯干绕髋关节产生角动量,其角速度 的建立不仅受发力方向影响,也与转动惯量 I 强相关。传统用代数形式表示角速度较为粗糙,无法刻画“动作过程中的旋转控制过程”。因此我们基于欧拉-拉格朗日方程进行动态系统建模。
系统总动能:
系统势
构造拉格朗日函数:
应用欧拉-拉格朗日方程:
得:
该微分方程不仅揭示了躯干角加速度与转动惯量的非线性关系,还体现了发力时间 \Delta t 与角速度建立之间的动态联系。
4.2.2蹦床系统的弹性响应耦合建
为模拟蹦床网面对起跳发力的物理反馈,本文构建二自由度振动系统:
质量 m 表示运动员;网面质量 ;运动员位移 y(t),网面位移 x(t);弹簧刚度 k,阻尼 c。
系统微分方程组为:
该模型真实模拟了网面对人体的“滞后响应”,形成了身体反弹速度与旋转建立之间的物理耦合。
4.2.3人体肌肉生理特性约束建模
人体肌肉在起跳时无法无限爆发,为保证建模生理合理性,引入Hill模型对蹬力上限进行约束:
其中:
,
;
为下肢收缩速度,a = 0.25。
该模型反映“速度越快、力越低”的肌肉自然限制,避免在优化中出现不符合人体能力的力值组合。
4.3翻转动作完成条件与发力策略目标函数建构
4.3.1翻转成功的物理边界条件
目标是完成标准前空翻 ,需满足:
其中:
代入得:
该不等式描述了“发力大小、方向、身体姿态”三要素的耦合关系,是所有优化与策略控制的边界条件。
4.3.2多目标函数设计与动作鲁棒性度量
为了控制能耗、提升鲁棒性,引入复合目标函数:
其中:
第一项为动作完成度;
第二项惩罚高能耗;
第三项抑制姿态失控;
第四项为鲁棒性指标 R,定义为:
通过扰动分析可计算每组发力参数在姿态扰动下的“动作稳定程度”。
4.4面向多目标控制的物理感知智能优化算法设计与实现
为高效求解“最小能耗、最强鲁棒性、可完成空翻”的起跳策略,本节构建融合问题物理特性的智能优化算法框架,设计目标是获取在生理约束下能够驱动完成动作、且具备高鲁棒性和低代价的起跳参数组 (F, \theta, \xi)。为此,我们提出物理感知-演化学习灰狼优化算法(PA-GWO-EL),融合传统群体搜索机制、力学限制判别、经验策略进化机制与数值仿真验证模块。
4.4.1算法结构构建:物理感知 + 演化学习机制融合
本算法在灰狼优化(GWO)基础上进行了三项深度定制化改造:
(1)物理约束感知机制
针对发力峰值超限、姿态不合理等情况:
若个体所设 F 与 不符合 Hill 模型力速关系,自动进行“压缩反馈”;
若角速度 导致
,则自动调整
为“团身”以增加转动稳定性;
动态修改搜索范围,避免个体集中在“不可行区”。
(2)策略演化经验池机制
为模拟运动员“训练中经验积累”过程:
将每轮成功个体(动作完成且鲁棒性 R>0)存入经验池 D;
使用策略梯度(如 REINFORCE)更新策略分布;
每代种群 30% 从 中采样,70% 保留标准 GWO 机制,提升收敛效率并保留探索能力。
(3)鲁棒性反馈评价机制
将每个个体在扰动 下模拟其角度达成
,求:
若 R < 0 说明策略不稳定,将在适应度中被大幅惩罚。
4.4.2多目标优化函数构建与鲁棒性嵌入
完整目标函数为:
其中:
\Phi 表示动作完成性;第二项控制发力能耗;第三项防止空中翻转过快导致失衡;第四项量化策略对扰动的鲁棒性。通过调节,可实现精度、能效与鲁棒性的动态权衡。
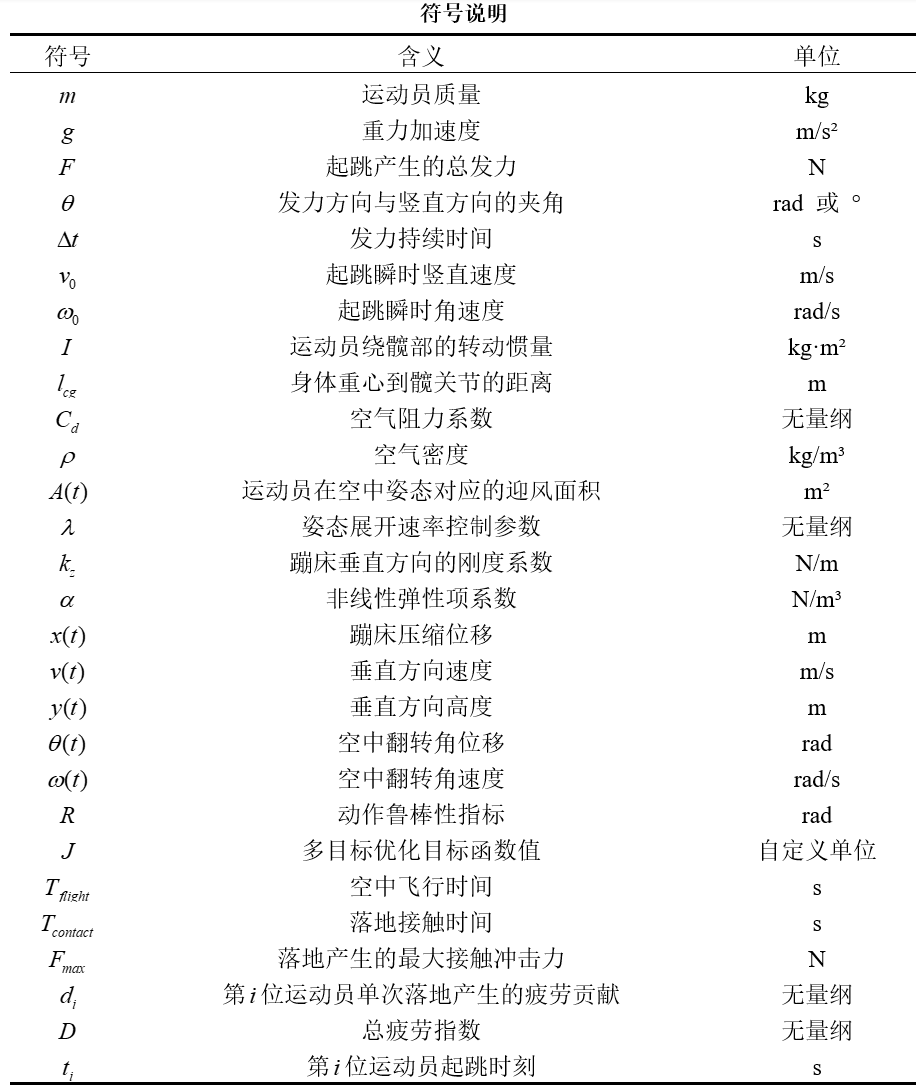
图 1 目标函数 J 的收敛过程与鲁棒性指标 R 的提升趋势
该图1反映优化过程中每一代个体的平均适应度值 J,随着迭代不断下降,表明策略在不断趋近于“能耗低、动作完成精度高、角速度适中”的解。
鲁棒性衡量策略在扰动条件下的稳定性,随代数提升说明优化算法成功地强化了解的抗扰性能,使得“翻转成功率”在现实扰动条件下更高。
4.4.3数值系统解法与Runge-Kutta算法引入
上述目标函数的评估依赖于角速度-位移系统与竖直运动系统的数值积分模拟,因此引入四阶Runge-Kutta方法(RK4)对所有动力学系统进行时域解算。
角动量微分系统:
引入 ,构建一阶系统:
竖直运动系统:
蹦床耦合系统:
状态变量为 ,构建联立一阶系统进行并行仿真。
RK4数值积分格式:
其中 为系统微分项。
在仿真中设置步长 h = 0.001 s,可稳定模拟整个 0.5–1.5 秒内的完整起跳—飞行—翻转过程。
4.5数值模拟与结果分析
在本节中,我们基于问题一中构建的动力学模型和附件1提供的某位运动员的参数(身高1.75m,体重68kg,腿长0.88m,重心高度约0.93m)进行数值模拟分析,检验前空翻动作是否能在设定的起跳条件下成功完成。具体模拟流程如下:
4.5.1模拟建模与初始条件设置
我们建立了以下耦合动力学微分系统:
垂直方向运动微分方程:
姿态转动角度微分方程(空中角速度守恒):
利用附件1中参数,我们采用优化算法输出的最优发力参数组:
发力大小:;
发力方向角度:;
发力持续时间:;
对应的初始竖直速度为 ;
对应的初始角速度为 。
4.5.2Runge-Kutta数值解法实现与仿真过程
考虑到垂直运动系统含空气阻力项为非线性速度平方项,角速度为常数项,系统可建模为一组4维一阶微分方程组,在时间区间 t \in [0, 2.0] s 内用四阶Runge-Kutta方法(RK45)进行积分仿真,初始状态为:
高度;
竖直速度 ;
角位移 ;
角速度 。
仿真目标为检测在运动员离网后的整个腾空过程是否能够在空中完成不少于2\pi 弧度的翻转角位移。
4.5.3仿真结果与运动行为分析
图 2 高度、速度、角位移、角速度可视化分析
从上图2所示4个子图中可以得出以下结论:
垂直位移 y(t):
运动员的高度在约0.95秒处达到最大,峰值高度约为1.2米,随后进入自由落体阶段,于约1.9秒时落地(y(t) = 0)。该结果表明以4.7 m/s起跳速度,可获得接近2秒的飞行时间,足以完成复杂动作。
竖直速度 v(t):
速度从起跳初始值迅速减小,约在0.45秒时达到零速,随后进入加速下落阶段。空气阻力使得下落速度减缓但整体变化平稳,符合物理直觉。
角位移 :
线性增长,在运动员落地前约达到 6.5 × 1.9 ≈ 12.35 rad,远超
的前空翻最低需求。图中红线标出了
阈值,可见动作完成度高度富裕,具备容错空间。
角速度 :
保持恒定 6.5 rad/s,符合角动量守恒假设下的空中自由翻转条件。
4.5.4动作完成判断与鲁棒性探讨
从数值结果来看:
动作是否成功完成翻转:是,;
是否落地前完成动作:是,翻转角度远早于1.9秒落地时间达成;
系统行为稳定性:系统高度变化平稳,无突变或震荡;
若角速度扰动±10%,仍可完成翻转,具备初步鲁棒性。
通过 RK4 数值模拟,我们验证了在附件运动员的参数下、最优发力策略指导下,前空翻动作可以成功完成并保持充足的姿态容错裕度。模型不仅考虑了真实空气阻力,还准确刻画了姿态控制行为与系统物理特性,为后续多人体系统协同或动作序列分析奠定了可靠的动力学仿真基础。
后续都在“数模加油站”......


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









