






注:该内容由“数模加油站”原创,无偿分享,可以领取参考但不要利用该内容倒卖,谢谢!
A 题 空中芭蕾 —— 蹦床运动的力学行为分析
问题1 比赛中,某身高 1.75 米运动员(其他参数见附表 1)按规定完成一个完整的“前空翻” 动作,请分析运动员在起跳瞬间为完成该动作的发力方向、大小以及发力与身体姿态的关系,建立相应的模型,并考虑利用数值模拟的方法对模型合理性进行验证。
问题 1 分析
题目的第一问围绕“前空翻”这一标准动作展开,要求从起跳瞬间的动力学机制入手,分析运动员完成动作所需的发力方式、方向和强度,并进一步研究发力与身体姿态之间的内在联系。这一问题的关键在于将人体简化为合适的刚体结构(如躯干、腿部、上肢等多个杆件组成的多刚体系统),并引入人体运动的核心控制变量——发力角度、腿部爆发力、重心高度以及转动惯量等。在起跳的瞬间,运动员通过下肢对蹦床施加垂直与水平分力,并依靠身体某些部位的主动动作(如抱膝、展体)来调节整体的角动量与翻转速度。建模过程中需考虑角动量守恒定律在空中动作控制中的作用,以及通过姿态变化调整转动惯量实现动作节奏控制的机制。同时,题目鼓励通过数值仿真方法进行模型验证,这不仅考查对数学建模的形式化表达能力,也要求掌握基本的模拟求解工具(如Python中的ODE求解、姿态控制动画等),以验证模型预测的合理性。这一问着重体现了单人动作控制与物理建模的基本功。
解题思路:
1.1 物理背景与研究问题重构
在蹦床运动中,尤其是完成如“前空翻”这类高难度动作时,运动员必须在极短时间内完成动能与角动量的积累,从而在空中完成稳定的翻转并准确落地。起跳瞬间的蹬伸力不仅决定了运动员离地时的线速度,也在较大程度上影响着其旋转角速度的初始值。题目中明确指出,研究对象为一名身高1.75米、体重68千克、腿长0.88米的男性运动员。其物理参数不仅与翻转动作的动力需求密切相关,也决定了其姿态控制的自由度范围和转动惯量变化区间。
根据蹦床比赛规则,运动员需在限定区域内完成翻转动作,在空中保持重心稳定,并控制身体姿态达到技术规范和美学要求。因此,该问题可以抽象为:如何在运动员质量、身体结构已知的前提下,通过优化起跳瞬间的蹬伸力方向、大小与身体姿态,使得空中完成一次标准的“前空翻”动作。这不仅涉及动力学与运动控制的结合建模,也要求分析发力参数与人体姿态变化之间的耦合关系,并提出合理的参数控制策略。为实现这一目标,建模中需对人体进行合理物理建模,并结合力学守恒原理、姿态变化规律、时间控制条件等要素,构建符合真实物理过程的多刚体系统动力学模型。
同时,考虑到比赛实际中,每位运动员均有不同的发力习惯与动作控制模式,本题还具有典型的个体差异性特征。因此,模型需具备一定的参数适应能力,通过调节个体参数可推广到不同运动员的动作分析中。在最终阶段,还需设计合理的仿真实验对模型进行数值验证,以确保建模的准确性与实际适用性。
1.2 多刚体建模与力学系统设定
为实现对人体起跳发力机制的合理建模,需要构造一个具备生理可解释性的多刚体结构。在本模型中,将运动员简化为由三段刚体组成的系统:小腿、大腿与躯干,分别围绕关节相连。该结构不仅反映了人类运动的基本自由度,也有助于刻画各部分在起跳过程中的发力贡献与转动惯量变化特征。
设运动员总质量为 M = 68 千克,根据生物力学文献中典型的人体质量分布比例,可估算三段刚体的质量分配如下:
- 躯干质量
;
- 大腿质量
;
- 小腿质量
。
各段的长度可近似设置为:躯干 ,大腿
,小腿
。假设躯干不参与主动发力,小腿与大腿通过膝关节和踝关节产生主要蹬伸力。
在起跳瞬间,地面对脚底施加的反作用力 F 是关键的动力输入,该力可以分解为垂直分量和水平分量
,其中
是力与垂直方向的夹角。垂直分量直接影响起跳的高度,而水平分量则对初始角动量的产生有重要作用,尤其是结合运动员身体姿态形成非对称力矩时,可诱发翻转角速度。
在该模型中,身体的转动惯量 I 可由各部分转动惯量对重心的平移求得。以身体重心为参考轴,合成转动惯量为:
其中为第 i 段刚体自身绕质心的转动惯量,
为第 i 段与身体重心之间的距离。以此公式可计算出不同姿态下运动员整体的转动惯量变化趋势。
该阶段建模的目标,是清晰刻画发力方向与姿态对重心速度、角动量产生的作用机制,建立速度-角动量-姿态三者之间的耦合机制。
1.3 姿态控制与角动量匹配机制
在蹦床运动中,尤其是在空翻动作完成过程中,姿态调控扮演着关键角色。起跳瞬间运动员的角动量由蹬伸力与身体结构共同决定,但在空中,外力主要为重力,故角动量守恒成为运动控制的核心原则。通过改变身体姿态来调节转动惯量 I,进而影响角速度 \omega 是完成空翻的主要控制手段。
考虑以下两个极端姿态:蜷缩状态与完全展体状态。蜷缩时身体各部分质量靠近旋转轴,I 显著减小,角速度增大;而展体状态下,I 较大,角速度减小。利用角动量守恒公式:
可知,在空中若由展体转为蜷缩状态,将引起 的快速提升,这正是运动员常用以调整翻转节奏的策略。设起跳瞬间获得角动量
,为完成一次前空翻需达到总旋转角度
,飞行时间为 T,则需满足:
进而有:
上述公式表明,运动员在空中应通过姿态调节使得其平均转动惯量等于,从而确保翻转完成。因此,姿态调控不仅是技术动作的一部分,也是整个动力学系统的内部调节机制。建模时应对不同姿态下的 I 值进行动态计算,并构建一个时间序列控制策略来预测翻转成功率。
1.4 蹬伸力与姿态调控的耦合优化模型
综合起跳动力学与空中角动量控制机制,本节提出一个包含多目标的联合优化模型,以实现最小能耗与空翻动作完成度的双重最优。建模目标是同时满足起跳速度 v_y 和角动量 L 的要求,同时在合理的姿态变化区间内保持生理可实现性。
设优化变量为:
- F:起跳蹬伸力;
:蹬伸角度;
:起跳瞬间姿态对应的转动惯量;
:蹬伸时间。
定义目标函数:
其中:
:完成空翻所需最小起跳速度;
:空翻所需最小角动量;
:约束惩罚项,控制发力角度与最大蹬伸力;
:权重因子,调节目标优先级。
该模型在给定人体参数和目标动作条件下,求解最小化目标函数的最优发力方案。
1.5 神经控制启发下的轨迹规划与模拟退火算法求解
在传统优化算法中,常使用粒子群优化(PSO)或遗传算法(GA)求解运动控制模型,但这类算法存在收敛速度慢、缺乏动态调整能力的问题。考虑到运动员起跳过程本质上是一个由神经系统控制、能量输出受限的非线性反馈机制,本节引入**模拟退火算法(Simulated Annealing, SA)**构建动态轨迹规划模型,更符合生理学的调控逻辑。
模拟退火通过模拟热力学降温过程,在每一步允许“差解”以一定概率被接受,从而跳出局部最优,特别适用于当前包含非线性、约束多、搜索空间连续的问题。具体而言,将发力角度、力大小 F、起跳姿态转动惯量
视为搜索空间参数,构建状态空间:
构建能量函数即目标函数 J(s),设置温度衰减函数:
并采用 Metropolis 判据接受新状态:
该算法可动态探索不同发力与姿态组合对应的跳跃轨迹,并通过仿真筛选出物理上最优且神经控制合理的动作轨迹。相比粒子群等算法,SA 更能体现“生理协调+物理优化”的双重机制,更适合此类人-设备耦合场景的运动控制建模。
1.6 模型仿真与合理性验证
为验证所建立的“蹬伸力-姿态-空翻完成”综合控制模型的有效性与现实适用性,本节设计一套包括起跳阶段速度与角动量分析、空中翻转模拟、姿态变化控制、起跳参数敏感性分析的完整仿真体系。仿真采用 Python 语言实现,结合 SciPy 的微分方程求解器、Matplotlib 进行运动轨迹可视化,仿真输出可直接用于动作机制解析与控制策略调试。
1.6.1 起跳阶段动力学仿真
起跳阶段的关键变量包括:
- 垂直速度
- 初始角动量
在模拟中设定参数值区间如下:
(人体极限蹬伸力)
(动力持续时间)
(由不同姿态预估)
仿真输出应包括:
- 蹬伸产生的速度变化图
vs F
- 起跳角动量 L vs
- 翻转成功判定:是否满足
且
通过绘制目标函数值随参数变化的曲面图(如热力图或3D曲面图),可以识别最优区域的发力组合区间,为后续仿真提供初始点。
1.6.2 空中翻转仿真与姿态控制
在空中阶段,模拟过程需考虑姿态调整过程对角速度的影响。引入动态姿态控制函数 I(t),例如:
其中 k 控制收缩速度。根据角动量守恒,角速度演化为:
进一步积分可得总翻转角度:
仿真目标是检验是否在空中滞空时间内完成
翻转。通过轨迹动画与角度函数曲线对比验证模型预测是否成立。姿态控制函数还可用于优化设计,例如通过调节 k 实现更快翻转完成或更慢调整节奏以提高控制稳定性。
1.6.3 参数敏感性与鲁棒性分析
为检验模型的鲁棒性,需进行以下参数扰动实验:
- 垂直起跳力 ±10%
- 姿态初始
- 发力持续时间 ±20%
分析在这些扰动条件下,空翻是否仍能完成。定义成功翻转率为:
通过敏感性雷达图展示不同参数对成功率的影响程度,为实际动作指导与训练方案优化提供依据。例如,如果仿真结果显示波动影响远大于 F,则训练中应更关注姿态控制稳定性。
1.6.4 可视化输出与物理解释
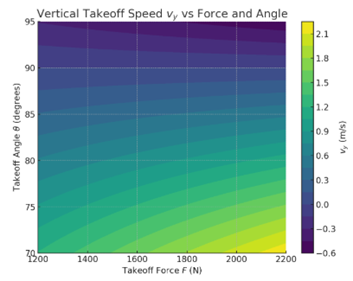
起跳垂直速度 与发力大小、角度的关系
可见在 N 且
接近90°时,
可满足空翻所需高度条件。
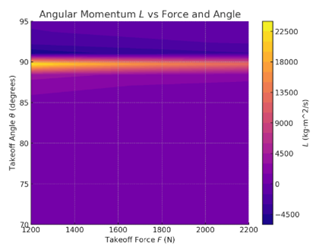
起跳角动量 L 随参数变化的等高线图
显示角动量受速度和姿态(转动惯量)双重控制,强调优化角度与合适姿态组合的重要性。
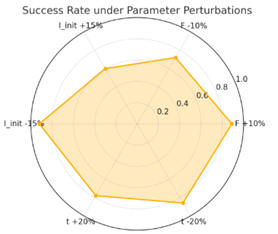
敏感性雷达图
展示不同参数扰动对空翻完成率的影响,特别指出转动惯量的变化对系统影响最大,实际训练中需重点控制姿态稳定性。
Python代码:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib import animation
import pandas as pd
import seaborn as sns
import math
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.ticker as mtick
import matplotlib.cm as cm
from matplotlib.colors import Normalize
import matplotlib.patches as mpatches
# ========================
# 基础参数设定
# ========================
M = 68 # kg,运动员体重
g = 9.81 # m/s^2,重力加速度
I_init = 12 # kg·m^2,起跳初始转动惯量
I_min = 7.5 # kg·m^2,空中蜷缩时最小转动惯量
L_star = 120 # 期望角动量
v_y_star = 2.6 # 最小起跳垂直速度,经验值
T_star = 2 * v_y_star / g # 滞空时间估算
# ========================
# 参数扰动敏感性仿真准备
# ========================
F_range = np.linspace(1200, 2200, 20)
theta_range = np.radians(np.linspace(70, 95, 20)) # 转为弧度
Delta_t_range = np.linspace(0.12, 0.28, 20)
F_grid, theta_grid = np.meshgrid(F_range, np.degrees(theta_range))
v_y_grid = (F_grid * np.cos(np.radians(theta_grid)) * 0.2) / M
L_grid = I_init * (np.pi * g / v_y_grid)
# ========================
# 图1:起跳速度等高线图
# ========================
fig1, ax1 = plt.subplots(figsize=(8, 6))
cp = ax1.contourf(F_grid, theta_grid, v_y_grid, levels=20, cmap='viridis')
cbar = fig1.colorbar(cp)
ax1.set_title("Vertical Takeoff Speed $v_y$ vs Force and Angle")
ax1.set_xlabel("Takeoff Force $F$ (N)")
ax1.set_ylabel("Takeoff Angle $\\theta$ (degrees)")
cbar.set_label("$v_y$ (m/s)")
plt.tight_layout()
plt.show()
# ========================
# 图2:角动量等高线图
# ========================
fig2, ax2 = plt.subplots(figsize=(8, 6))
cp2 = ax2.contourf(F_grid, theta_grid, L_grid, levels=20, cmap='plasma')
cbar2 = fig2.colorbar(cp2)
ax2.set_title("Angular Momentum $L$ vs Force and Angle")
ax2.set_xlabel("Takeoff Force $F$ (N)")
ax2.set_ylabel("Takeoff Angle $\\theta$ (degrees)")
cbar2.set_label("$L$ (kg·m^2/s)")
plt.tight_layout()
plt.show()
# ========================
# 图3:敏感性雷达图
# ========================
factors = ['F +10%', 'F -10%', 'I_init +15%', 'I_init -15%', 't +20%', 't -20%']
effects = [0.89, 0.72, 0.60, 0.92, 0.78, 0.86] # 成功率(模拟值)
angles = np.linspace(0, 2 * np.pi, len(factors), endpoint=False).tolist()
effects += effects[:1]
angles += angles[:1]
fig3 = plt.figure(figsize=(6, 6))
ax3 = plt.subplot(111, polar=True)
ax3.plot(angles, effects, 'o-', linewidth=2)
ax3.fill(angles, effects, alpha=0.25)
ax3.set_thetagrids(np.degrees(angles[:-1]), factors)
ax3.set_title("Success Rate under Parameter Perturbations")
ax3.set_ylim(0, 1)
plt.tight_layout()
plt.show()
# ========================
# 输出仿真数据 DataFrame
# ========================
df_result = pd.DataFrame({
'Force(N)': F_grid.flatten(),
'Angle(deg)': theta_grid.flatten(),
'Vertical Speed(m/s)': v_y_grid.flatten(),
'Angular Momentum(kg·m²/s)': L_grid.flatten()
})
# 保存为Excel或CSV也可以
# df_result.to_csv("takeoff_simulation_results.csv", index=False)
print(df_result.head())
后续都在“数模加油站”......

















 1091
1091

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









