






ethercat运动控制
ethercat总线
ethercat高速总线
labview实时系统
美国NI实时系统
高精度实时运动控制器
高精度实时ethercat主站
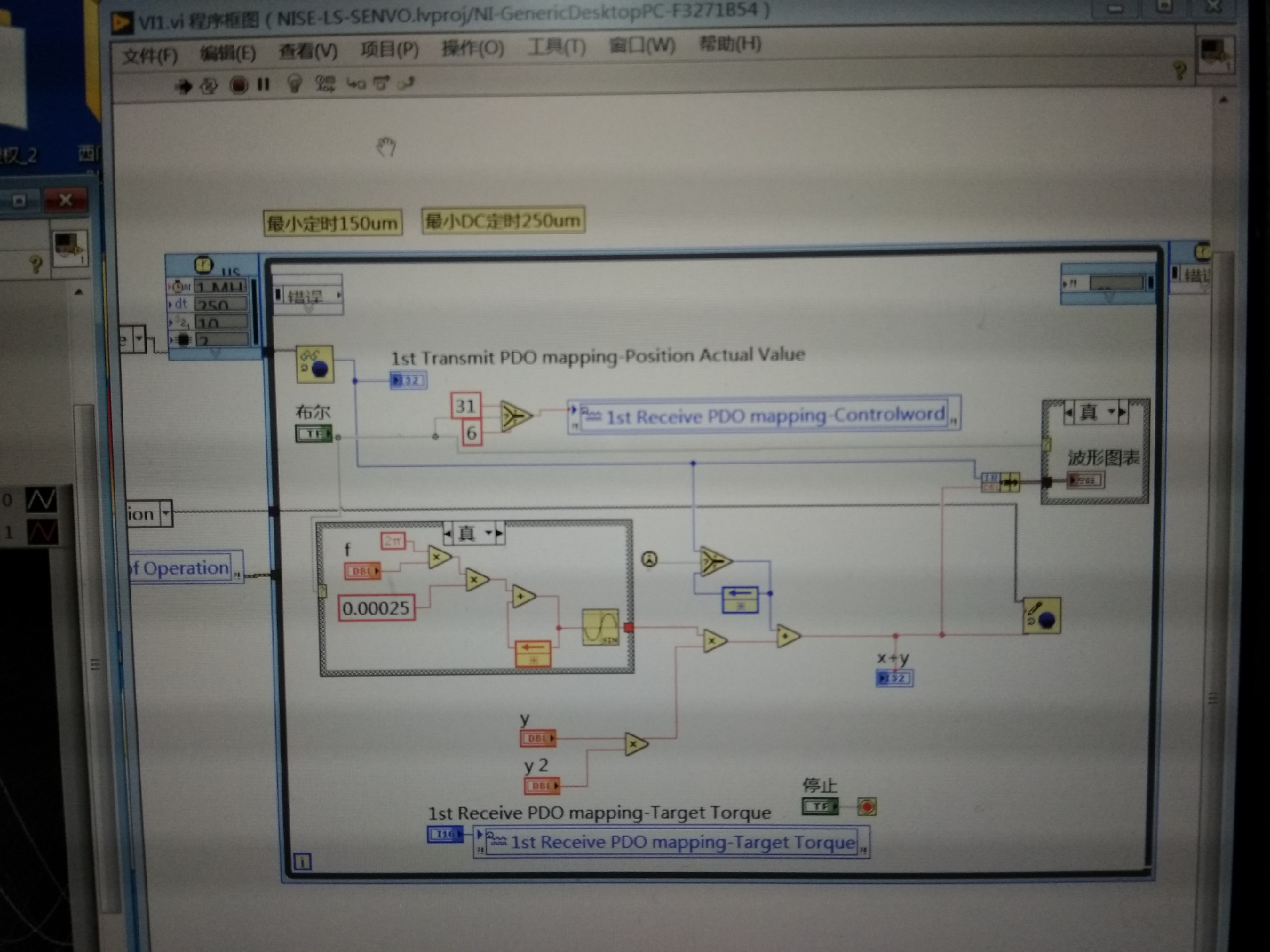
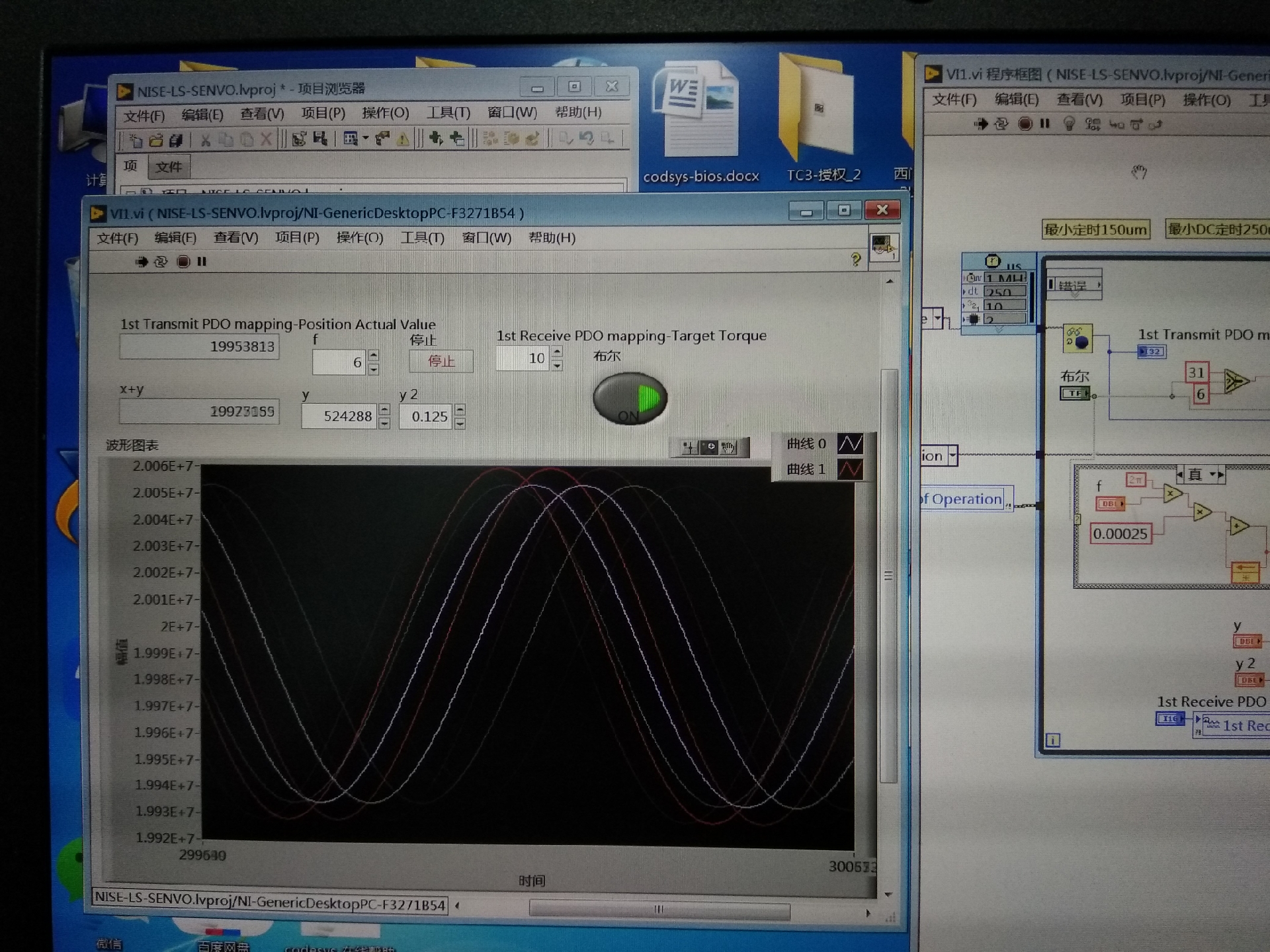
图形化编程生成rtexe,自动下载到控制器运行,类似于软PLC功能,比传统plc强大的是,多通讯接口http,opc,net,快速构建上下位机程序,支持视觉,采集卡。
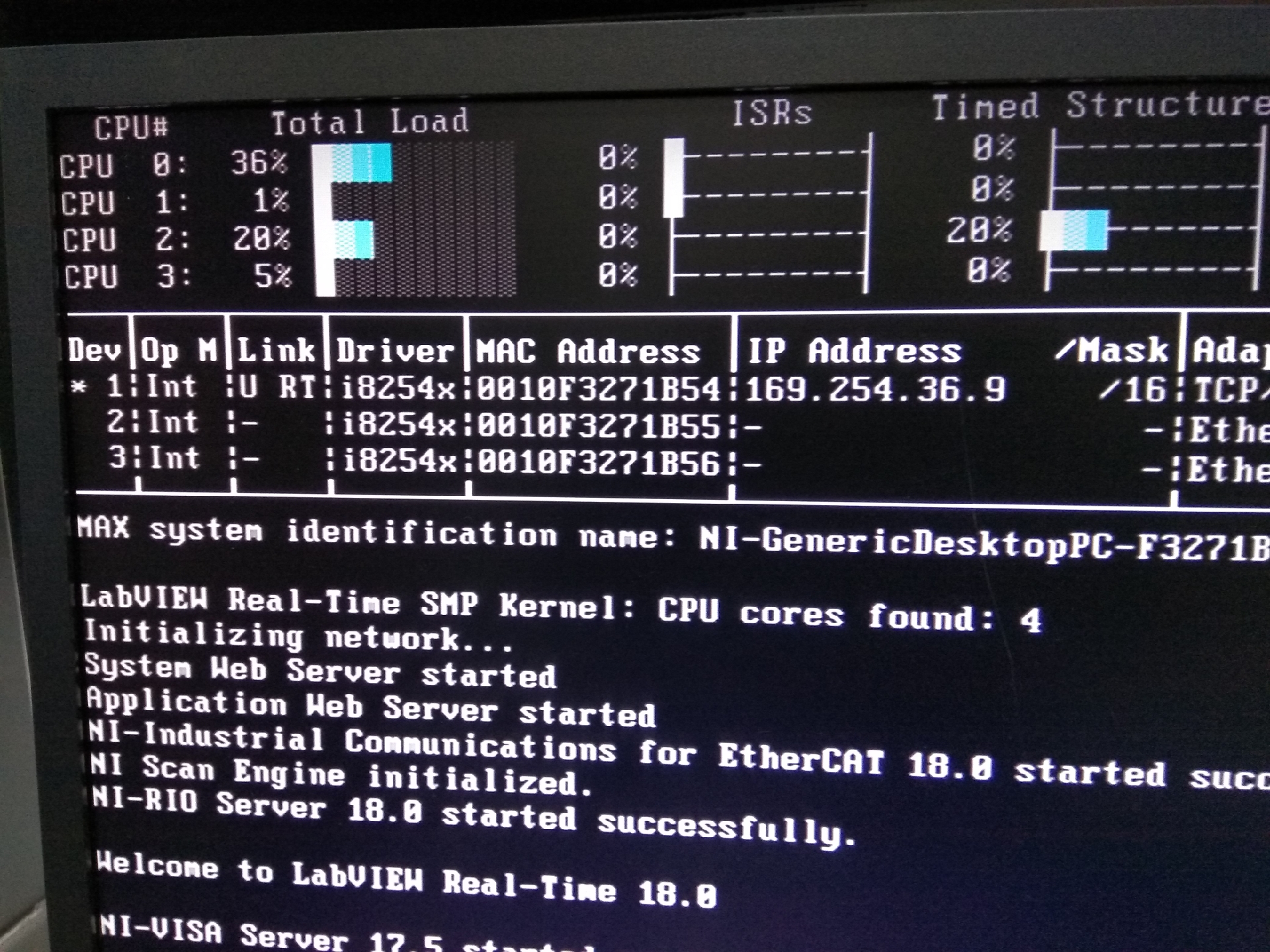
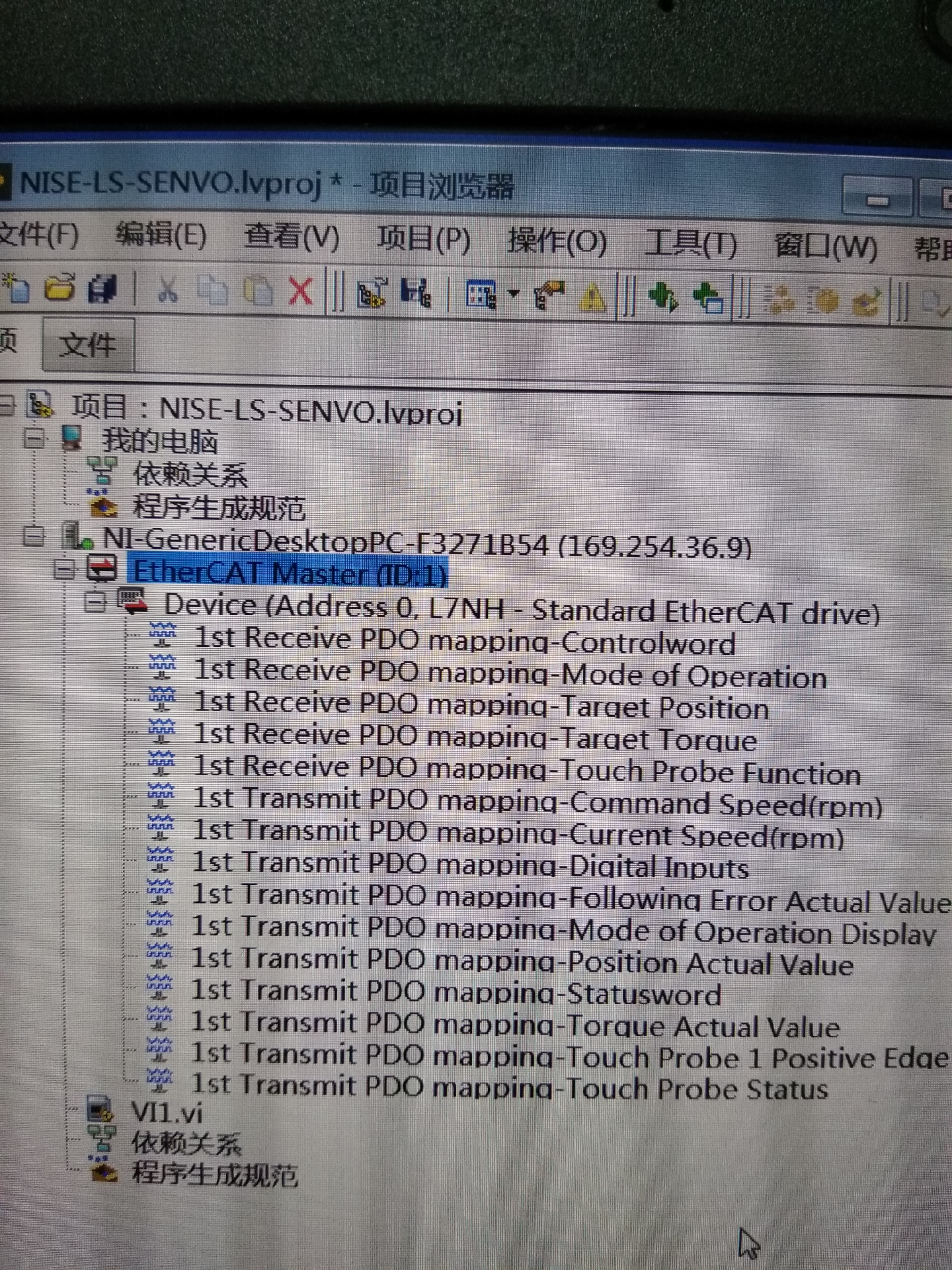
兼容性特别好,系统,控制器,伺服,总线,都是不同厂商,但能同步周期能到250微秒。
ID:69169641948693423
简单工控


EtherCAT运动控制是一种基于高速总线的实时运动控制技术,它采用EtherCAT总线作为通信介质,实现了高精度的实时运动控制。本文将介绍EtherCAT总线的原理和特点,以及其与LabVIEW实时系统和美国NI实时系统的结合应用。
首先,我们先来了解一下EtherCAT总线的基本原理。EtherCAT总线是一种基于以太网的实时通信网络,它采用了“Master-Slave”结构,通过在总线上串联连接各个从站设备,从而实现高效的数据通信。与传统的总线技术相比,EtherCAT总线具有很高的通信速率和较低的延迟,并且能够支持大量的从站设备。
在实时运动控制方面,EtherCAT总线具有很多优势。首先,它支持高速数据传输,通信周期可以达到250微秒,能够满足高精度实时控制的需求。其次,EtherCAT总线具有良好的兼容性,不同厂商的系统、控制器、伺服等设备可以无缝集成在一起,实现协同工作。此外,EtherCAT总线还支持多种通信接口,如HTTP、OPC、NET等,能够快速构建上下位机程序,并且支持视觉和采集卡等外部设备的集成。
此外,EtherCAT总线还具有图形化编程的特点,可以使用LabVIEW实时系统和美国NI实时系统进行开发。LabVIEW实时系统是一种基于图形化编程的实时控制开发平台,能够快速生成rtexe文件,并自动下载到控制器上运行。通过与EtherCAT总线结合使用,可以实现类似软PLC的功能,将控制逻辑与实时运动控制相结合,提供更强大的控制能力。
在实际应用中,EtherCAT总线的高精度实时运动控制能够广泛应用于工业自动化领域。例如,在机器人控制系统中,通过EtherCAT总线实现多轴联动控制,可以实现高精度的路径规划和运动控制;在半导体设备制造中,通过EtherCAT总线实现对各个设备的实时监控和控制,提高生产效率和质量。
综上所述,EtherCAT运动控制是一种基于EtherCAT总线的高精度实时运动控制技术,它结合了LabVIEW实时系统和美国NI实时系统的图形化编程能力,具有高速通信、良好兼容性和多种通信接口的特点。在工业自动化领域具有广阔的应用前景,为实时运动控制提供了强大的支持。
相关的代码,程序地址如下:http://imgcs.cn/641948693423.html
















 657
657

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









