






ethercat运动控制
ethercat总线
ethercat高速总线
labview实时系统
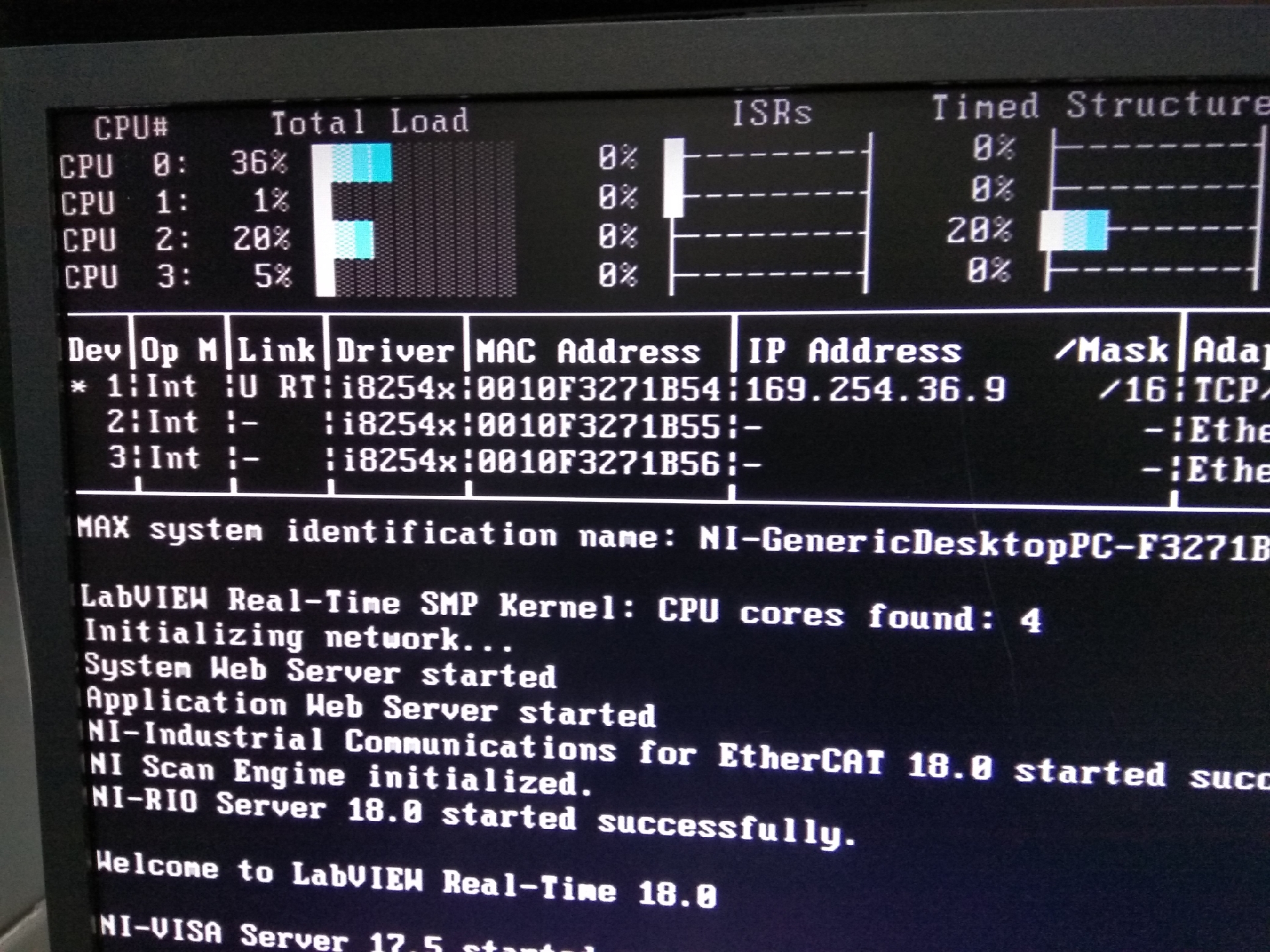
美国NI实时系统
高精度实时运动控制器
高精度实时ethercat主站
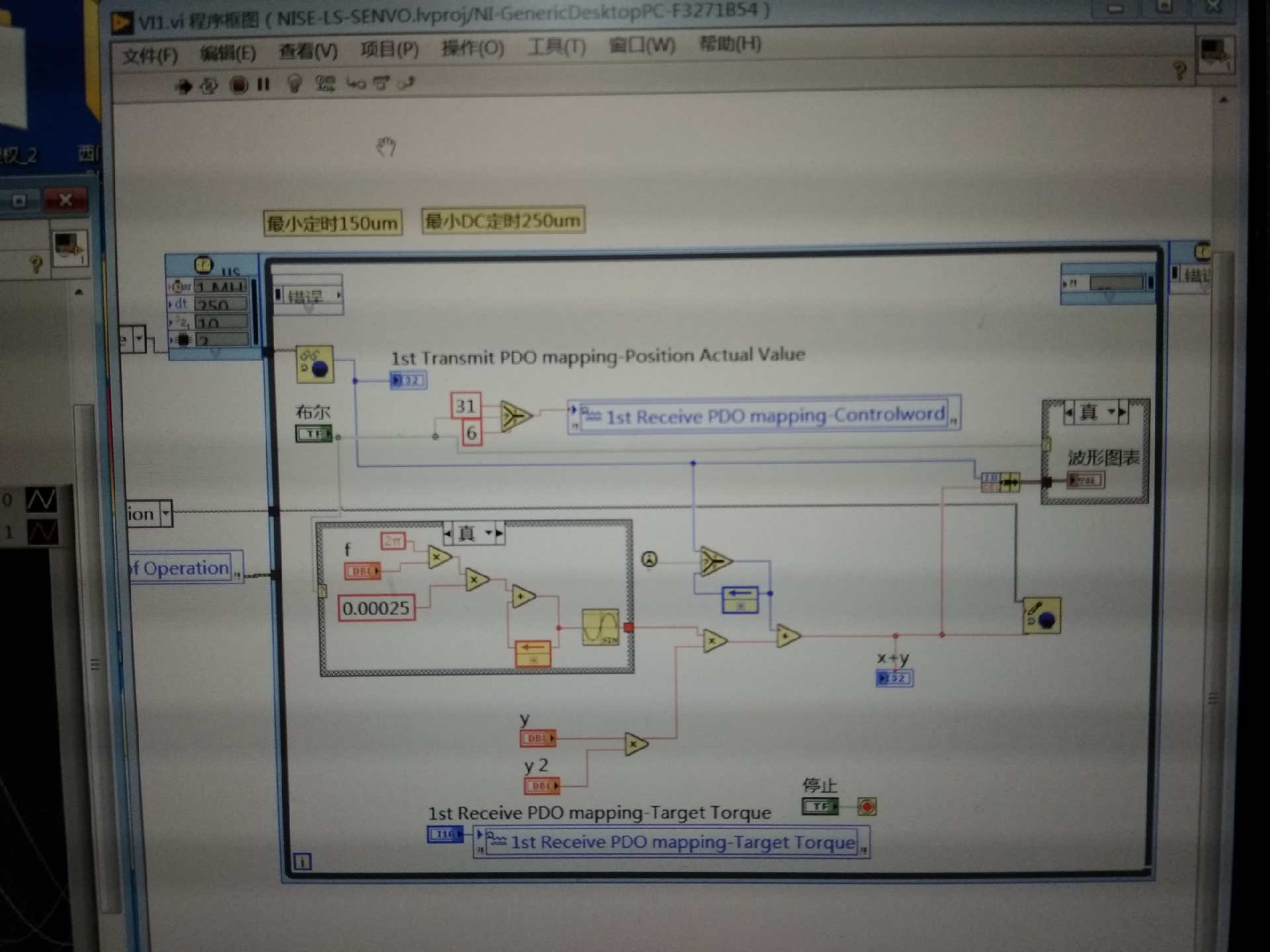
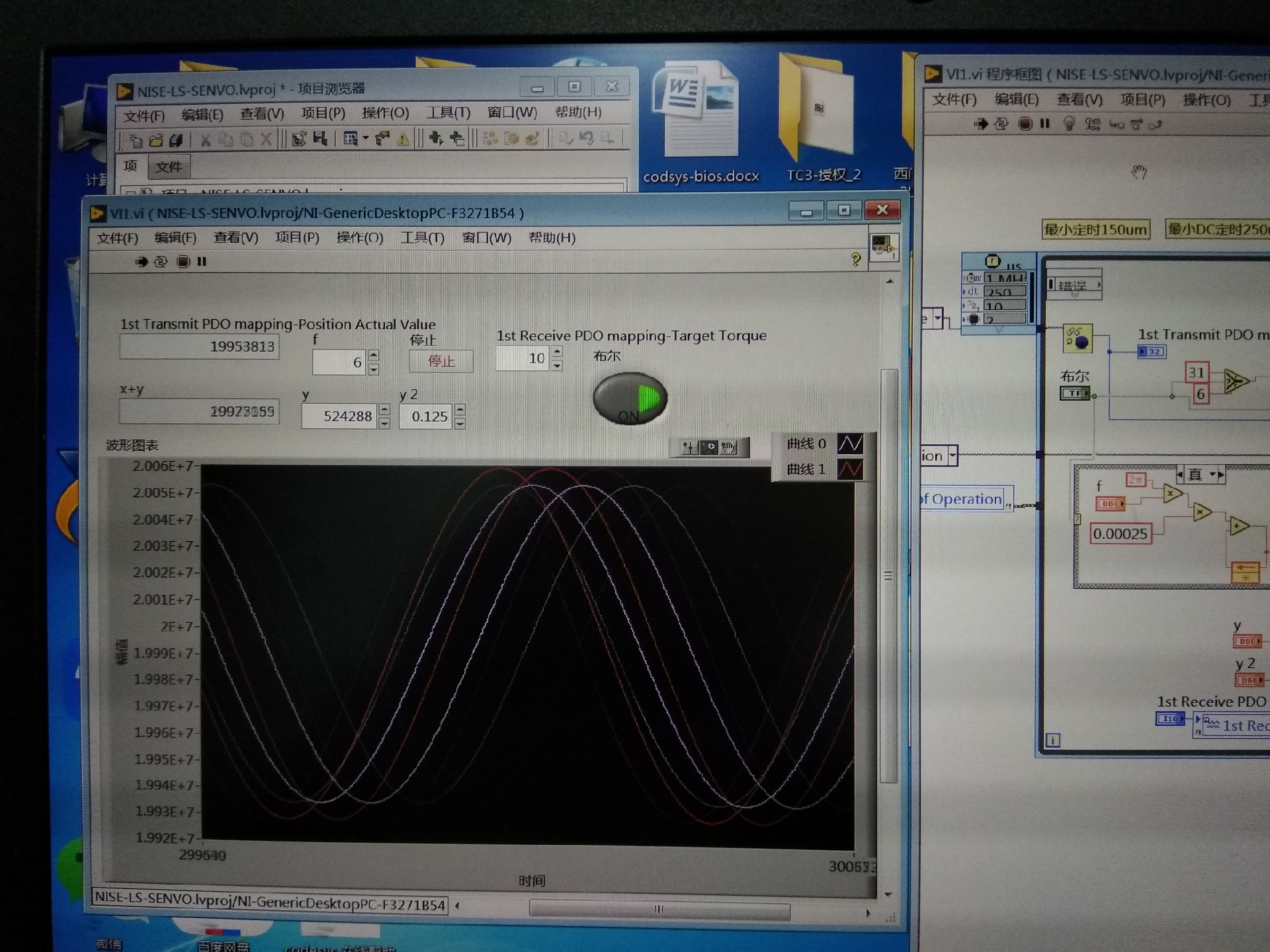
图形化编程生成rtexe,自动下载到控制器运行,类似于软PLC功能,比传统plc强大的是,多通讯接口http,opc,net,快速构建上下位机程序,支持视觉,采集卡。
兼容性特别好,系统,控制器,伺服,总线,都是不同厂商,但能同步周期能到250微秒。
ID:69169641948693423
简单工控


ethercat运动控制
ethercat总线
ethercat高速总线
labview实时系统
美国NI实时系统
高精度实时运动控制器
高精度实时ethercat主站
图形化编程生成rtexe,自动下载到控制器运行,类似于软PLC功能,比传统plc强大的是,多通讯接口http,opc,net,快速构建上下位机程序,支持视觉,采集卡。
兼容性特别好,系统,控制器,伺服,总线,都是不同厂商,但能同步周期能到250微秒。
ID:69169641948693423
简单工控
 2297
1057
2437
2297
1057
2437

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























