






【蚁群算法】 改进蚁群算法 Dijkstra算法 遗传算法 人工势场法实现二维 三维空间路径规划
本程序为蚁群算法+Dijkstra算法+MAKLINK图理论实现的二维空间路径规划
算法实现:
1)基于MAKLINK图理论生成地图,并对可行点进行划分;
2)用Dijkstra算法实现次优路径的寻找;
3)在Dijkstra算法的基础上加入了蚁群算法,调整了搜索策略,使路径更短
可调参数:算法迭代次数;起始点;目标点;障碍物位置;障碍物大小
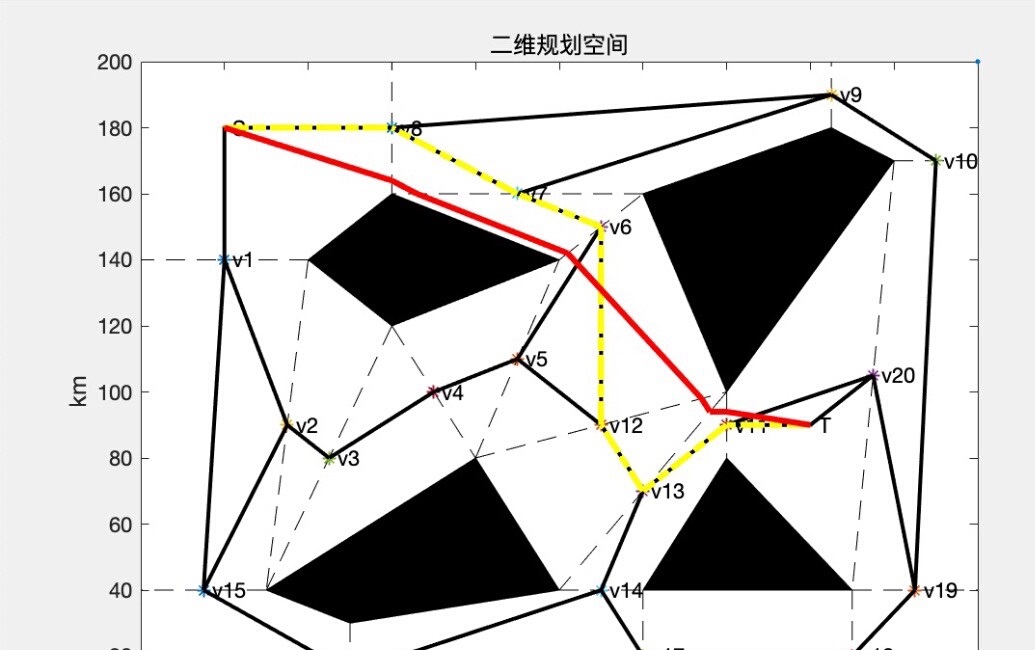
仿真结果:地图上显示最优路径的对比 + 迭代曲线 + 输出行走距离
YID:9259675637461038
ZeHomme
【蚁群算法】改进蚁群算法、Dijkstra算法、遗传算法、人工势场法实现二维三维空间路径规划
蚁群算法(Ant Colony Optimization, ACO)是一种模拟蚁群寻找食物的行为而产生的一种启发式算法。它通过模拟蚂蚁在寻找食物时的行为规律,从而寻找到最优的路径。然而,传统的蚁群算法在应用于路径规划时存在着一些问题,比如易陷入局部最优、搜索速度慢等。本文将围绕蚁群算法进行改进,结合Dijkstra算法、遗传算法和人工势场法,实现更高效、准确的二维空间路径规划。
首先,基于MAKLINK图理论生成地图,并对可行点进行划分。MAKLINK图是一种基于节点连接关系的图论模型,它可以有效地描述节点之间的连接关系。通过构建MAKLINK图,我们可以将地图抽象成一个有向图,并为每个节点赋予相关的权重。
接下来,我们运用Dijkstra算法实现次优路径的寻找。Dijkstra算法是一种单源最短路径算法,它通过不断更新节点的距离值,并选择最短路径来寻找从起始点到目标点的最优路径。在本算法中,我们将Dijkstra算法应用于MAKLINK图,以获取次优路径。
为了进一步优化路径规划效果,我们引入了蚁群算法。蚁群算法模拟了蚂蚁在寻找食物过程中的信息交流和路径选择行为,通过蚂蚁在路径上释放信息素、选择信息素浓度较高的路径来寻找最短路径。为了避免陷入局部最优解,我们在蚁群算法的基础上引入了遗传算法,通过交叉和变异操作,增加了搜索的多样性,提高了全局搜索能力。
另外,为了更好地处理复杂的地形和障碍物,我们还引入了人工势场法。人工势场法是一种基于物理学的方法,通过模拟粒子在场势作用下的运动,来寻找最优路径。在我们的算法中,我们根据障碍物的位置和大小,构建了相应的势场,并将其与蚁群算法和Dijkstra算法相结合,以实现更精准的路径规划。
此外,我们还提供了可调参数以供用户调整,包括算法迭代次数、起始点、目标点、障碍物位置和大小。用户可以根据具体需求进行调整,以获取最优的路径规划结果。
最后,我们通过仿真结果展示了算法的效果。在地图上显示了最优路径的对比,以及算法在迭代过程中的曲线变化。同时,输出了行走距离,以评估路径的优劣。
综上所述,本程序的蚁群算法改进了传统蚁群算法的局限性,结合Dijkstra算法、遗传算法和人工势场法,实现了更高效、准确的二维空间路径规划。该算法可以广泛应用于汽车导航、机器人路径规划等领域,为用户提供更好的路径规划方案。
相关的代码,程序地址如下:http://coupd.cn/675637461038.html
















 939
939

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









