






 该实验通过在R023小型双轮差速底盘前安装3个近红外传感器,配合Arduino主控板进行编程,实现机器人在检测到悬崖(桌面边缘)时自动转向避开。程序中定义了不同的电机控制函数,当传感器读取到悬崖信号时,机器人会执行左转、右转或后退的动作。此外,文章提到可替换灰度或白标传感器来优化避障效果。
该实验通过在R023小型双轮差速底盘前安装3个近红外传感器,配合Arduino主控板进行编程,实现机器人在检测到悬崖(桌面边缘)时自动转向避开。程序中定义了不同的电机控制函数,当传感器读取到悬崖信号时,机器人会执行左转、右转或后退的动作。此外,文章提到可替换灰度或白标传感器来优化避障效果。
1. 功能说明
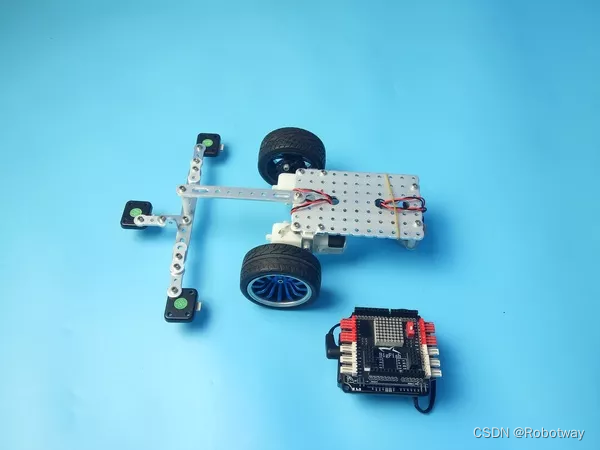
本实验使用的样机为R023样机小型双轮差速底盘。在样机前方安装3个近红外传感器 ,实现机器人躲避悬崖、在某平台上移动时不会掉下去的效果。
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1 |
| 传感器 | 近红外传感器 |
| 电池 | 7.4V锂电池 |
左轮直流电机连在D9,D10接口上;右轮直流电机连在D5,D6接口上;3个近红外传感器从左到右分别连在A0、A4、A3接口上。

3. 示例程序
编程环境:Arduino 1.8.19
编写并烧录以下程序(nine.ino),该程序将实现演示视频中的动作。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-02-10 https://www.robotway.com/
------------------------------------------------------------------------------------*/
void Right();
void Left();
void Stop();
void Forward();
void Back();
void setup()
{
pinMode( 17, INPUT);
pinMode( 18, INPUT);
pinMode( 14, INPUT);
pinMode( 10, OUTPUT);
pinMode( 6, OUTPUT);
pinMode( 5, OUTPUT);
pinMode( 9, OUTPUT);
}
void loop()
{
if (((!( digitalRead(14)) && ! (digitalRead(17)) ) ))
{
Forward();
}
if (( digitalRead(14) ))
{
Left();
delay( 300 );
}
if (( digitalRead(17) ))
{
Right();
delay( 300 );
}
if (( digitalRead(18) ))
{
Back();
delay( 1000 );
analogWrite(5 , 100);
analogWrite(6 , 0);
analogWrite(9 , 0);
analogWrite(10 , 100);
delay( 1500 );
}
}
void Right()
{
analogWrite(5 , 0);
analogWrite(6 , 0);
analogWrite(9 , 100);
analogWrite(10 , 0);
}
void Forward()
{
analogWrite(5 , 100);
analogWrite(6 , 0);
analogWrite(9 , 100);
analogWrite(10 , 0);
}
void Back()
{
analogWrite(5 , 0);
analogWrite(6 , 100);
analogWrite(9 , 0);
analogWrite(10 , 100);
}
void Left()
{
analogWrite(5 , 100);
analogWrite(6 , 0);
analogWrite(9 , 0);
analogWrite(10 , 0);
}
void Stop()
{
analogWrite(5 , 0);
analogWrite(6 , 0);
analogWrite(9 , 0);
analogWrite(10 , 0);
}4. 扩展
本实验采用3个近红外传感器,利用的是近红外传感器能够识别到距离较近的桌面,无法识别到距离较远的地面,因此桌面要距离地面远一些。
本实验还可以使用灰度传感器或者白标传感器。利用的是灰度和白标在悬崖处极难收到反射回来的红外线的原理,因此相应的桌面必须是浅色,如果桌面也是深色,灰度和白标传感器就无法区分桌面和悬崖了。
如何实现双轮差速底盘躲避悬崖功能的详细资料请参考 小型双轮差速底盘-躲避悬崖


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









