







2.23 BMP180气压传感器
1BMP180是一款高精度、小体积、低能耗的压力传感器,可以轻松应用在移动设备中.在测量海拔高度时,传统的做法是通过测量某一高度的大气压力,再经过换算才能得到高度数据。BMP180不仅可以实时的测量大气压力,还能测量实时温度。同时它还具有IIC总线接口,便于单片机进行访问。另外它的使用也很方便,不需要太多的操作就可读取到气压及测量数据
2.23.1 模块来源
资料下载链接:
【完整代码资料见:https://pan.quark.cn/s/caf4b8533741】
2.23.2 规格参数
工作电压:1.8~3.6V
工作电流:0.1~1000uA
温度精度:±1℃
温度范围:0~65℃
气压范围:300~1100 hPa
气压精度:1 hPa
输出方式: IIC
管脚数量:3 Pin
2.23.3 移植过程
我们的目标是在梁山派GD32F470上能够测量环境温度、气压、高度。首先要获取资料,查看数据手册应如何实现,再移植至我们的工程。
2.23.3.1 查看资料
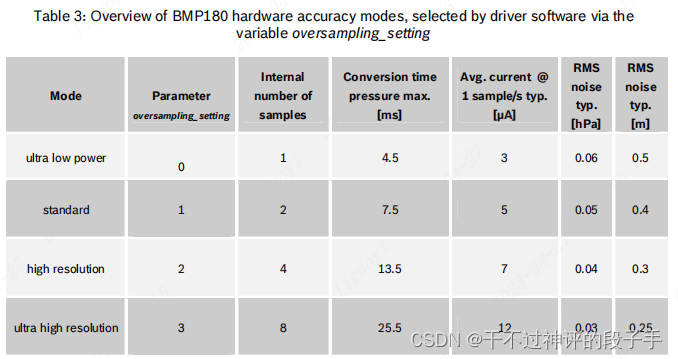
BMP180共有四种工作模式,每种模式有不同的采样数量、转换速度和噪声等参数的不同。可以通过写入ctrl_meas寄存器来设置模式,默认为第一个ultra low power超低功耗。
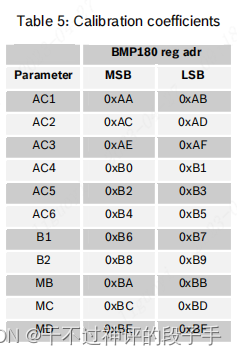
BMP180的气压和温度数值并不是可以直接读取的,每个不同的传感器中,都有自己独特的校准数值,存储在内置的E2PROM存储器中。当微处理器读取传感器的原始温度和气压数值后,再根据E2PROM中的校准数值进行转换,才能得到真正的温度、气压数据。每个校准数值的存储位置如下,微处理器通过这些地址读取校准数值。
和所有的IIC总线器件一样,BMP180也有一个器件的固定地址,根据其数据手册,出厂时默认BMP180的从机地址为0xEE(写入方向),或0xEF(读出方向)。
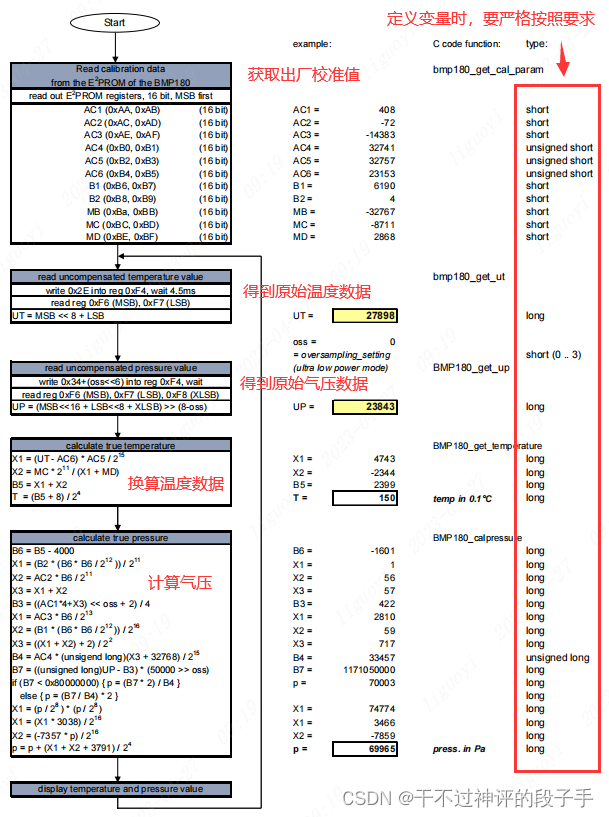
以下为读取温度与气压的步骤:
- 把16位的校准数值读取到单片机中,可以看到一共有11个数值。需要注意的是高位存储在MSB地址,低位存储在LSB地址。例如数值AC1,高八位存储在0xAA地址,低八位存储在0xAB地址。
- 温度初始值读取步骤:
(1)往寄存器0xf4写入0x2e,等待4、5ms;
(2)读0xf6(高八位)和0xf7(低八位)两个寄存器;
(3)进行换算: UT=MSB <<8 +LSB。 - 气压初始值读取步骤:
(1)往寄存器0xf4写入0x34(如果不是默认的工作模式,需要加上oss左移六位的结果,oss为设置工作模式 的寄存器0xf4的bit7、bit6位),等待4、5ms;
(2)读0xf6(16-23位)、0xf7(8-15位)和0xf8(0-7位)三个寄存器;
(3)进行换算: UP=MSB <<16 + LSB<<8 + XLSB >> (8-oss(这个同温度初始值读取一样))。 - 根据第一步读出来的校准系数和第二步读出来的UT、UP进行换算,最后得出来的T(温度,每个数值代表0.1摄氏度),p(气压,每个数值代表1帕)。
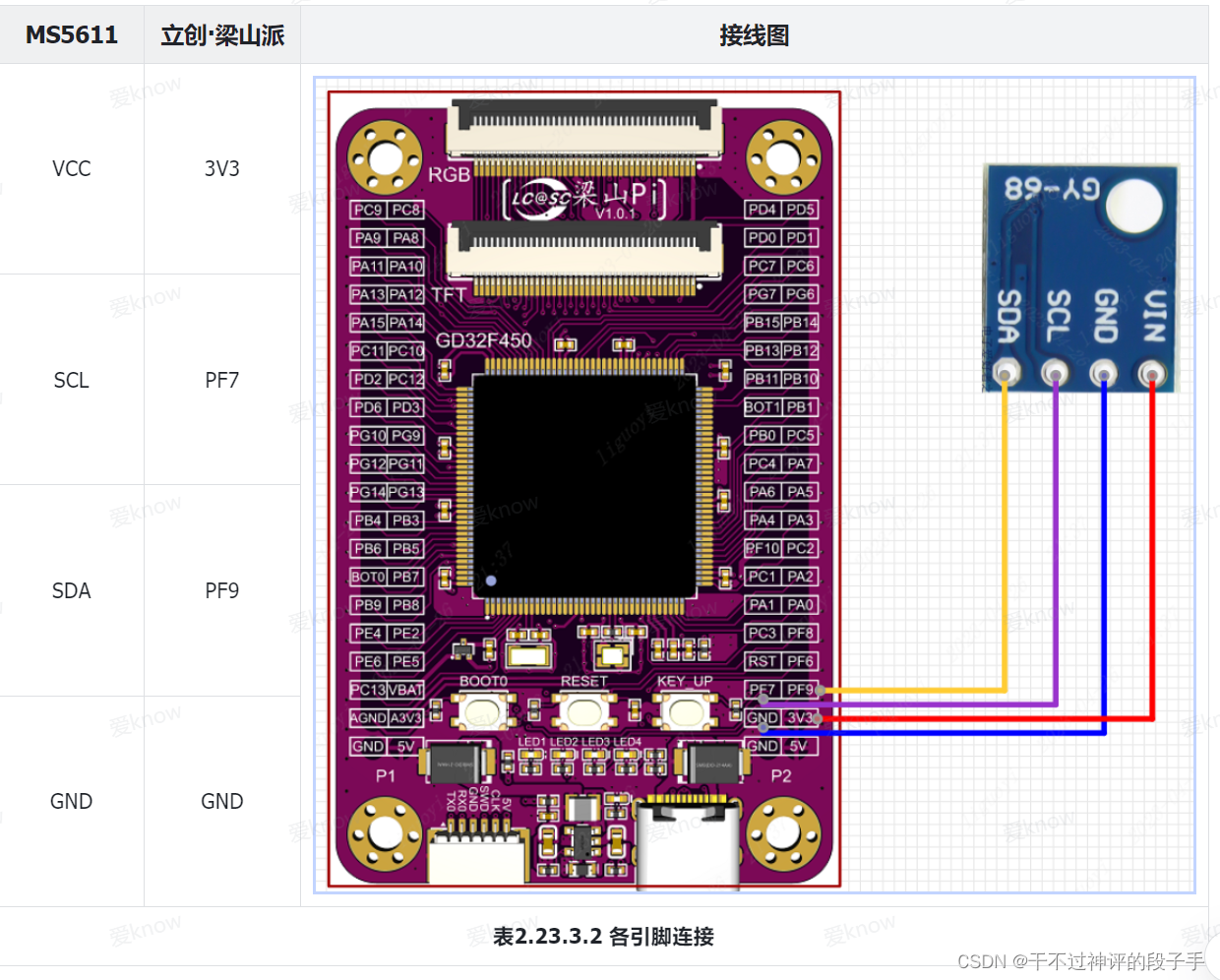
2.23.3.2 引脚选择
2.23.3.3 移植至工程
移植步骤中的导入.c和.h文件与上一节相同,只是将.c和.h文件更改为bsp_bmp180.c与bsp_bmp180.h。见2.2.3.3 移植至工程。这里不再过多讲述。移植完成后面修改相关代码。
在文件bsp_bmp180.c中,编写如下代码。
/********************************************************************************
* 文 件 名: bsp_bmp180.c
* 版 本 号: 初版
* 修改作者: LC
* 修改日期: 2022年04月26日
* 功能介绍: 气压传感器bmp180的底层驱动
* 使用说明:
******************************************************************************
* 开发板官网:www.lckfb.com
*********************************************************************************/
#include "bsp_bmp180.h"
#include "bsp_usart.h"
#include "stdio.h"
#include "systick.h"
#include "math.h"
typedef struct _BMP180_STRUCT{
short AC1;
short AC2;
short AC3;
uint16_t AC4;
uint16_t AC5;
uint16_t AC6;
short B1;
short B2;
short MB;
short MC;
short MD;
}_BMP180_PARAM_;
_BMP180_PARAM_ param={0};
long B5 = 0;
/******************************************************************
* 函 数 名 称:BMP180_GPIO_Init
* 函 数 说 明:BMP180的引脚初始化
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void BMP180_GPIO_Init(void)
{
/* 使能时钟 */
rcu_periph_clock_enable(RCU_SCL);
rcu_periph_clock_enable(RCU_SDA);
/* 配置SCL为输出模式 */
gpio_mode_set(PORT_SCL,GPIO_MODE_OUTPUT,GPIO_PUPD_PULLUP,GPIO_SCL);
/* 配置为推挽输出 50MHZ */
gpio_output_options_set(PORT_SCL,GPIO_OTYPE_OD,GPIO_OSPEED_50MHZ,GPIO_SCL);
/* 配置SDA为输出模式 */
gpio_mode_set(PORT_SDA,GPIO_MODE_OUTPUT,GPIO_PUPD_PULLUP,GPIO_SDA);
/* 配置为推挽输出 50MHZ */
gpio_output_options_set(PORT_SDA,GPIO_OTYPE_OD,GPIO_OSPEED_50MHZ,GPIO_SDA);
}
/******************************************************************
* 函 数 名 称:IIC_Start
* 函 数 说 明:IIC起始时序
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Start(void)
{
SDA_OUT();
SDA(1);
delay_us(5);
SCL(1);
delay_us(5);
SDA(0);
delay_us(5);
SCL(0);
delay_us(5);
}
/******************************************************************
* 函 数 名 称:IIC_Stop
* 函 数 说 明:IIC停止信号
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Stop(void)
{
SDA_OUT();
SCL(0);
SDA(0);
SCL(1);
delay_us(5);
SDA(1);
delay_us(5);
}
/******************************************************************
* 函 数 名 称:IIC_Send_Ack
* 函 数 说 明:主机发送应答或者非应答信号
* 函 数 形 参:0发送应答 1发送非应答
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Send_Ack(unsigned char ack)
{
SDA_OUT();
SCL(0);
SDA(0);
delay_us(5);
if(!ack) SDA(0);
else SDA(1);
SCL(1);
delay_us(5);
SCL(0);
SDA(1);
}
/******************************************************************
* 函 数 名 称:I2C_WaitAck
* 函 数 说 明:等待从机应答
* 函 数 形 参:无
* 函 数 返 回:0有应答 1超时无应答
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char I2C_WaitAck(void)
{
char ack = 0;
unsigned char ack_flag = 10;
SCL(0);
SDA(1);
SDA_IN();
delay_us(5);
SCL(1);
delay_us(5);
while( (SDA_GET()==1) && ( ack_flag ) )
{
ack_flag--;
delay_us(5);
}
if( ack_flag <= 0 )
{
IIC_Stop();
return 1;
}
else
{
SCL(0);
SDA_OUT();
}
return ack;
}
/******************************************************************
* 函 数 名 称:Send_Byte
* 函 数 说 明:写入一个字节
* 函 数 形 参:dat要写人的数据
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void Send_Byte(uint8_t dat)
{
int i = 0;
SDA_OUT();
SCL(0);//拉低时钟开始数据传输
for( i = 0; i < 8; i++ )
{
SDA( (dat & 0x80) >> 7 );
__nop();
SCL(1);
delay_us(5);
SCL(0);
delay_us(5);
dat<<=1;
}
}
/******************************************************************
* 函 数 名 称:Read_Byte
* 函 数 说 明:IIC读时序
* 函 数 形 参:无
* 函 数 返 回:读到的数据
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char Read_Byte(void)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
SCL(0);
delay_us(5);
SCL(1);
delay_us(5);
receive<<=1;
if( SDA_GET() )
{
receive|=1;
}
delay_us(5);
}
SCL(0);
return receive;
}
/******************************************************************
* 函 数 名 称:BMP180_Write_Cmd
* 函 数 说 明:向BMP180写入一个字节数据
* 函 数 形 参:regaddr寄存器地址 cmd写入的数据
* 函 数 返 回:无
* 作 者:LC
* 备 注:regaddr=0xf4, cmd=0X2E
******************************************************************/
void BMP180_Write_Cmd(uint8_t regaddr,uint8_t cmd)
{
IIC_Start();//起始信号
Send_Byte(0XEE);//器件地址+写
if( I2C_WaitAck() == 1 ) printf("Write_Cmd NACK -1\r\n");
Send_Byte(regaddr);
if( I2C_WaitAck() == 1 ) printf("Write_Cmd NACK -2\r\n");
Send_Byte(cmd);
if( I2C_WaitAck() == 1 ) printf("Write_Cmd NACK -3\r\n");
IIC_Stop();
}
/******************************************************************
* 函 数 名 称:BMP180_Read16
* 函 数 说 明:读取BMP180数据
* 函 数 形 参:regaddr读取的地址 len读取的长度
* 函 数 返 回:读取到的数据
* 作 者:LC
* 备 注:无
******************************************************************/
uint16_t BMP180_Read16(uint16_t regaddr,uint8_t len)
{
int timeout = 0;
uint16_t dat[3] = {0};
int i =0;
for( i = 0; i < len; i++ )
{
IIC_Start();//起始信号
Send_Byte(0XEE);//器件地址+写
if( I2C_WaitAck() == 1 ) printf("Read_Reg NACK -1\r\n");
Send_Byte(regaddr+i);
if( I2C_WaitAck() == 1 ) printf("Read_Reg NACK -2\r\n");
do{
timeout++;
delay_1ms(1);
IIC_Start();//起始信号
Send_Byte(0XEF);//器件地址+读
}while(I2C_WaitAck() == 1 && (timeout < 5) );
dat[i] = Read_Byte();
IIC_Send_Ack(1);
IIC_Stop();
delay_1ms(1);
}
if( len == 2 ) return ( (dat[0]<<8) | dat[1] );
if( len == 3 ) return (( (dat[0]<<16) | (dat[1]<<8) | (dat[2]) ) >> 8);
return 0;
}
/******************************************************************
* 函 数 名 称:BMP180_Get_Temperature
* 函 数 说 明:读取温度单位℃
* 函 数 形 参:无
* 函 数 返 回:温度
* 作 者:LC
* 备 注:无
******************************************************************/
float BMP180_Get_Temperature(void)
{
long UT = 0;
long X1 = 0, X2 = 0;
BMP180_Write_Cmd(0XF4, 0X2E);
delay_1ms(6);
UT = BMP180_Read16(0xf6,2);
X1 = ((long)UT - param.AC6) * param.AC5 / 32768.0;
X2 = ((long)param.MC * 2048.0) / ( X1 + param.MD );
B5 = X1 + X2;
return ((B5+8)/16.0)*0.1f;
}
/******************************************************************
* 函 数 名 称:BMP180_Get_Pressure
* 函 数 说 明:读取气压,单位Pa
* 函 数 形 参:无
* 函 数 返 回:当前气压,单位Pa
* 作 者:LC
* 备 注:无
******************************************************************/
float BMP180_Get_Pressure(void)
{
long UP = 0;
uint8_t oss = 0;
long X1 = 0, X2 = 0;
BMP180_Get_Temperature();
BMP180_Write_Cmd(0XF4, (0X34+(oss<<6)));
delay_1ms(10);
UP = BMP180_Read16(0xf6,3);
int32_t B6 = B5 - 4000;
X1 = (B6 * B6 >> 12) * param.B2 >> 11;
X2 = param.AC2 * B6 >> 11;
int32_t X3 = X1 + X2;
int32_t B3 = (((param.AC1 << 2) + X3) + 2) >> 2;
X1 = param.AC3 * B6 >> 13;
X2 = (B6 * B6 >> 12) * param.B1 >> 16;
X3 = (X1 + X2 + 2) >> 2;
uint32_t B4 = param.AC4 * (uint32_t)(X3 + 32768) >> 15;
uint32_t B7 = ((uint32_t)UP - B3) * 50000;
int32_t p;
if(B7 < 0x80000000){
p = (B7 << 1) / B4;
}else{
p = B7/B4 << 1;
}
X1 = (p >> 8) * (p >> 8);
X1 = (X1 * 3038) >> 16;
X2 = (-7375 * p) >> 16;
p = p + ((X1 + X2 + 3791) >> 4);
return p;
}
/******************************************************************
* 函 数 名 称:BMP180_Get_Altitude
* 函 数 说 明:计算海拔高度
* 函 数 形 参:p=当前气压
* 函 数 返 回:海拔高度
* 作 者:LC
* 备 注:无
******************************************************************/
float BMP180_Get_Altitude(float p)
{
//#define PRESSURE_OF_SEA 101325.0f // 参考海平面压强
float altitude = 0;
altitude = 44330*(1 - pow((p)/ 101325.0f, 1.0f / 5.255f));
printf("altitude = %.2f\r\n",altitude);
return altitude;
}
/******************************************************************
* 函 数 名 称:BMP180_Get_param
* 函 数 说 明:获取出厂校准值
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void BMP180_Get_param(void)
{
param.AC1 = BMP180_Read16(0xaa,2);
param.AC2 = BMP180_Read16(0xac,2);
param.AC3 = BMP180_Read16(0xae,2);
param.AC4 = BMP180_Read16(0xb0,2);
param.AC5 = BMP180_Read16(0xb2,2);
param.AC6 = BMP180_Read16(0xb4,2);
param.B1 = BMP180_Read16(0xb6,2);
param.B2 = BMP180_Read16(0xb8,2);
param.MB = BMP180_Read16(0xba,2);
param.MC = BMP180_Read16(0xbc,2);
param.MD = BMP180_Read16(0xbe,2);
}
在文件bsp_bmp180.h中,编写如下代码。
/********************************************************************************
* 文 件 名: bsp_bmp180.h
* 版 本 号: 初版
* 修改作者: LC
* 修改日期: 2022年04月26日
* 功能介绍:
******************************************************************************
* 开发板官网:www.lckfb.com
*********************************************************************************/
#ifndef _BSP_BMP180_H_
#define _BSP_BMP180_H_
#include "gd32f4xx.h"
//端口移植
#define RCU_SDA RCU_GPIOF
#define PORT_SDA GPIOF
#define GPIO_SDA GPIO_PIN_9
#define RCU_SCL RCU_GPIOF
#define PORT_SCL GPIOF
#define GPIO_SCL GPIO_PIN_7
//设置SDA输出模式
#define SDA_OUT() gpio_mode_set(PORT_SDA,GPIO_MODE_OUTPUT,GPIO_PUPD_PULLUP,GPIO_SDA)
//设置SDA输入模式
#define SDA_IN() gpio_mode_set(PORT_SDA,GPIO_MODE_INPUT,GPIO_PUPD_PULLUP,GPIO_SDA)
//获取SDA引脚的电平变化
#define SDA_GET() gpio_input_bit_get(PORT_SDA,GPIO_SDA)
//SDA与SCL输出
#define SDA(x) gpio_bit_write(PORT_SDA,GPIO_SDA, (x?SET:RESET))
#define SCL(x) gpio_bit_write(PORT_SCL,GPIO_SCL, (x?SET:RESET))
void BMP180_GPIO_Init(void);
float BMP180_Get_Temperature(void);
float BMP180_Get_Pressure(void);
void BMP180_Write_Cmd(uint8_t regaddr,uint8_t cmd);
void BMP180_Get_param(void);
float BMP180_Get_Altitude(float p);
#endif
2.23.4 移植验证
在自己工程中的main主函数中,编写如下。
【完整代码资料见:https://pan.quark.cn/s/caf4b8533741】
移植现象:每隔一秒测量一次温度、气压和高度,并发送至串口0。
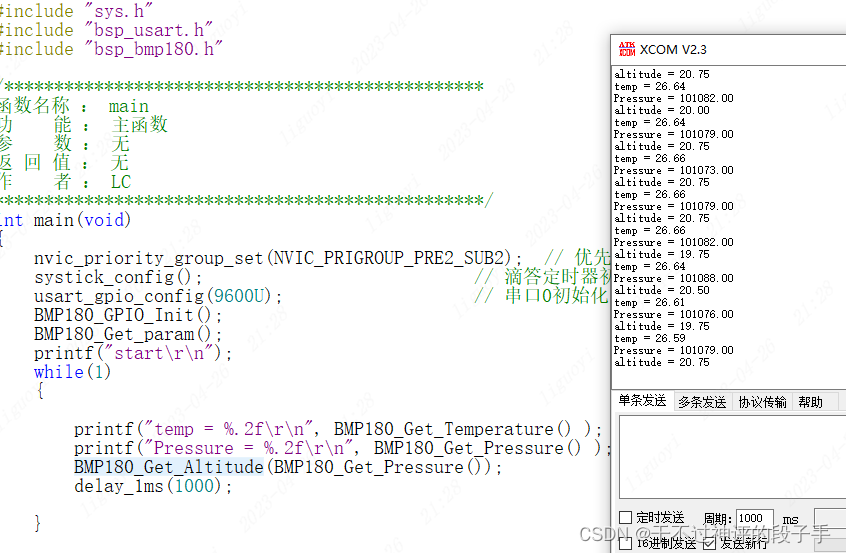
移植成功示例
【完整代码资料见:https://pan.quark.cn/s/caf4b8533741】
















 879
879











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









