






在该系列第十四篇文章中,介绍了很多轮廓的基础特征,包括面积、周长、质心、凸包等等,它们也都是轮廓的几何特征。本文主要介绍的是轮廓形状拟合。
轮廓形状拟合是指通过数学模型来近似轮廓的形状。轮廓形状拟合有助于简化轮廓的表示,并提取轮廓的几何特征,所以它的作用如下:
简化轮廓:可以使用简单的几何形状来近似复杂的轮廓,从而简化轮廓分析。
提取形状特征:可以使用轮廓形状拟合来提取形状特征,例如轮廓的长宽比、面积、周长等。
对象识别:可以使用轮廓形状拟合来识别具有特定形状的对象。
Part11. 最小外接矩形
在该系列第十四篇文章中,已经介绍过轮廓的外接矩形和最小外接矩形。
外接矩形 boundingRect()
最小外接矩形 minAreaRect()
| 特征 | 外接矩形 | 最小外接矩形 |
|---|---|---|
| 定义 | 能够包围图形的所有点的最小矩形 | 能够包围图形的所有点的最小矩形,且其长宽比为正 |
| 旋转 | 不考虑旋转 | 考虑旋转 |
| 面积 | 可能不是最小的 | 一定是最小的 |
| 用途 | 用于描述图形的大小和位置 | 用于描述图形的大小、位置和形状 |
Part22. 最小外接圆
轮廓的最小外接圆是指包围轮廓所有点的最小的圆。它可以用来描述轮廓的形状和大小,其圆心位于轮廓的质心。
在 OpenCV 中使用 minEnclosingCircle() 函数来计算轮廓的最小外接圆。
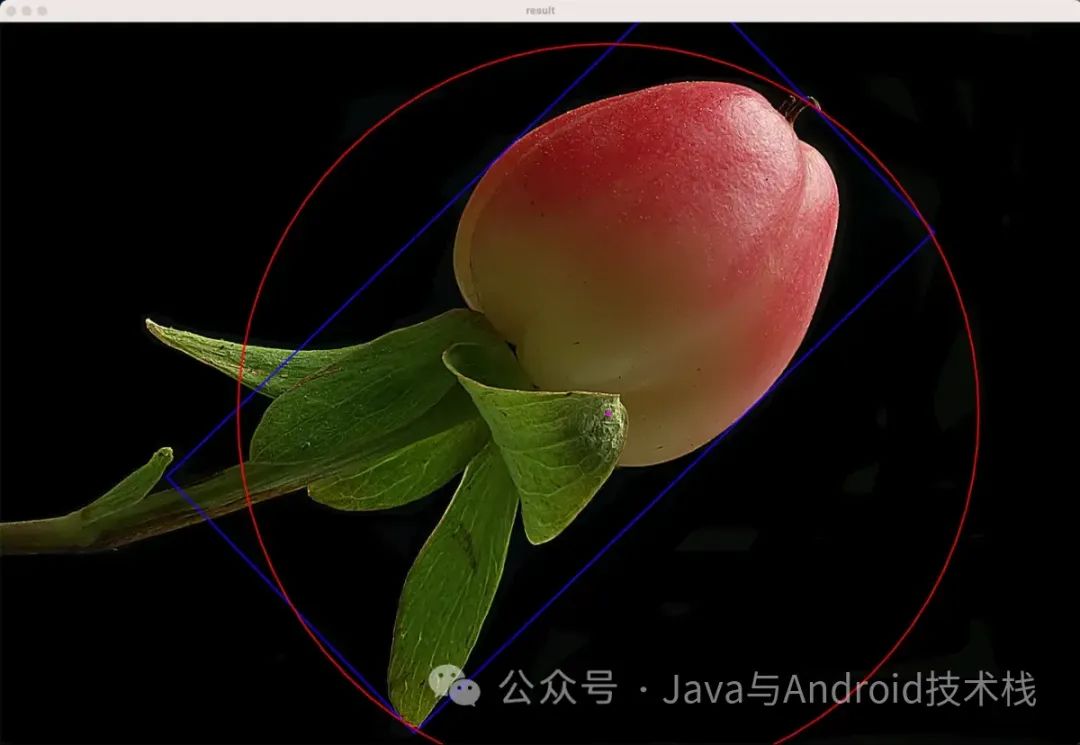
下面的例子,获取图中最大轮廓的最小外接矩形和最小外接圆,分别用蓝色和红色表示。
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace std;
using namespace cv;
bool ascendSort(vector<Point> a,vector<Point> b)
{
return contourArea(a) > contourArea(b);
}
int main(int argc, char **argv) {
Mat src = imread(".../fruit.jpg");
imshow("src", src);
Mat gray,thresh;
cvtColor(src, gray, cv::COLOR_BGR2GRAY);
threshold(gray,thresh,0,255,THRESH_BINARY | THRESH_OTSU);
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(thresh, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
sort(contours.begin(), contours.end(), ascendSort);//ascending sort
RotatedRect rrt = minAreaRect(contours[0]);// 获取最大轮廓的最小外接矩形
Point2f pt[4];
rrt.points(pt);
line(src, pt[0], pt[1], Scalar(255, 0, 0), 8, 8);
line(src, pt[1], pt[2], Scalar(255, 0, 0), 8, 8);
line(src, pt[2], pt[3], Scalar(255, 0, 0), 8, 8);
line(src, pt[3], pt[0], Scalar(255, 0, 0), 8, 8);
Point2f center;
float radius;
minEnclosingCircle(contours[0],center,radius); // 获取最大轮廓的最小外接圆
circle(src, center, radius, Scalar(0, 0, 255),8,8);
circle(src, center, 8, Scalar(255, 0, 255),8,8);
imshow("result", src);
waitKey(0);
return 0;
}
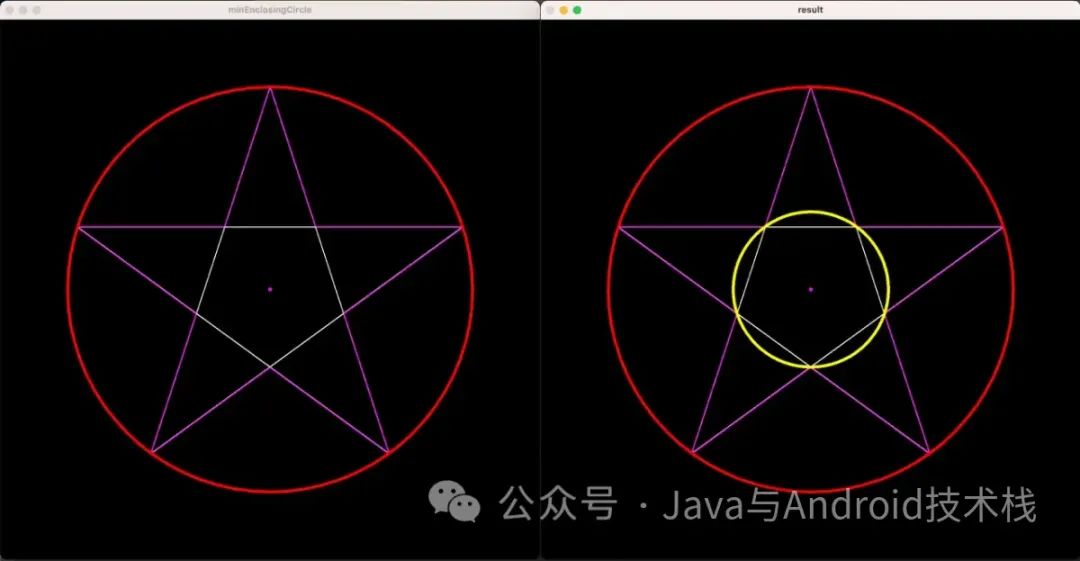
Part33. 最大内接圆
轮廓的最大内接圆是指轮廓内部的最大圆。在 OpenCV 中没有提供现成的函数来计算轮廓的最大内接圆,但是提供了 pointPolygonTest() 函数。
double pointPolygonTest( InputArray contour, Point2f pt, bool measureDist );其作用是计算像素点到轮廓的最小距离,对该函数的参数简单解释一下:
第三个参数 measureDist:计算的距离是否具有方向性的标志。
true 表示输出结果具有方向性。如果像素点在轮廓内部,返回值为正数,如果像素点在轮廓外部,返回值为负数。
false 表示输出结果不具有方向性。只判断像素点与轮廓之间的位置关系,如果像素点在轮廓的内部,返回值为 -1,如果像素点在轮廓的边缘上,返回值为0,如果像素点在轮廓的外部,返回值为 -1。
由于 pointPolygonTest() 函数返回的是点到轮廓的最短像素距离,只要扫描轮廓内部的点,找到内部点中到轮廓距离最大的点,这个距离就是最大内接圆的半径,并且该点就是圆心。
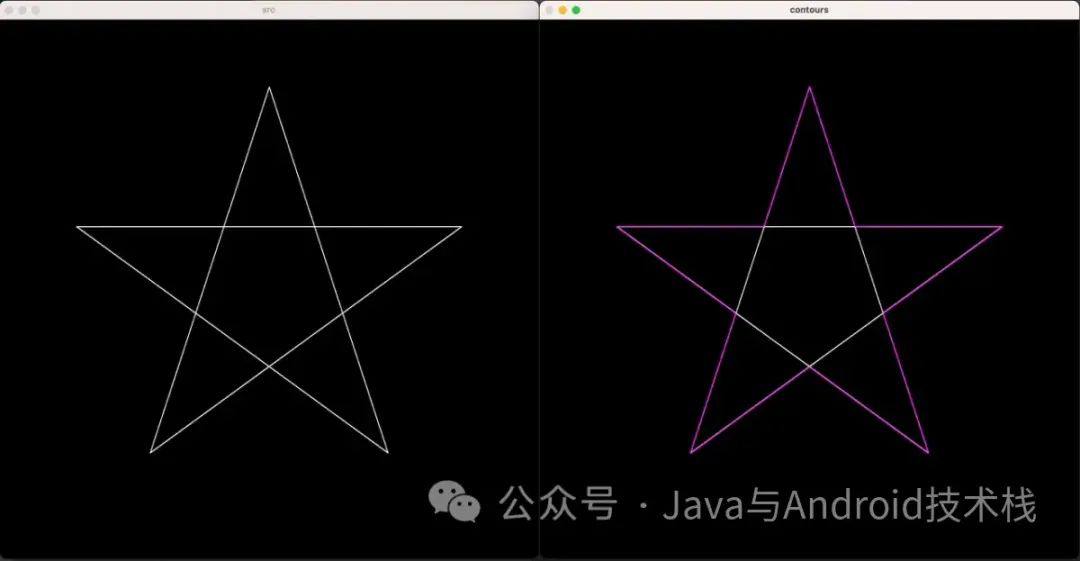
下面的例子,绘制了一个五角星,并画出它的最小外接圆和最大内接圆。
#include "opencv2/imgproc.hpp"
#include <opencv2/opencv.hpp>
#include <cmath>
using namespace std;
using namespace cv;
int main(int argc, char **argv) {
Mat image(1600, 1600, CV_8UC3, cv::Scalar(0, 0, 0));
int centerX = image.cols / 2;
int centerY = image.rows / 2;
int radius = 600;
vector<Point> vertices;
for (int i = 0; i < 5; i++) {
double angle = i * 2 * M_PI / 5 + M_PI / 2;
int x = centerX + radius * cos(angle);
int y = centerY - radius * sin(angle);
vertices.push_back(Point(x, y));
}
for (int i = 0; i < 5; i++) {
line(image, vertices[i], vertices[(i + 2) % 5], cv::Scalar(255, 255, 255), 2);
}
imshow("src", image);
Mat gray;
cvtColor(image,gray,cv::COLOR_BGR2GRAY);
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(gray, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
drawContours(image,contours,0,Scalar(255, 0, 255),2);// 绘制五角星的轮廓
imshow("contours", image);
Point2f center;
float r;
minEnclosingCircle(contours[0],center,r);
circle(image, center, radius, Scalar(0, 0, 255),8,8); // 绘制最小外接圆
circle(image, center, 2, Scalar(255, 0, 255),8,8);
imshow("minEnclosingCircle", image);
Mat raw_dist(image.size(), CV_32F);
for (int i = 0; i < image.rows; i++)
{
for (int j = 0; j < image.cols; j++)
{
raw_dist.at<float>(i, j) = (float)pointPolygonTest(contours[0], Point2f((float)j, (float)i), true);
}
}
// 获取最大内接圆半径
double minVal, maxVal;
Point maxDistPt; // inscribed circle center
minMaxLoc(raw_dist, &minVal, &maxVal, NULL, &maxDistPt);
minVal = abs(minVal);
maxVal = abs(maxVal);
circle(image, maxDistPt, maxVal, Scalar(0, 255, 255),8,8);
imshow("result", image);
waitKey(0);
return 0;
}
Part44. 轮廓逼近
轮廓逼近是指用更少的点来近似轮廓的曲线的方法。这可以用来简化轮廓的表示,提高计算效率,或减少噪声的影响。
轮廓逼近常用的方法:
Douglas-Peucker 算法:该算法是基于贪心算法的,它逐个删除轮廓中距离最近的两个点。
Ramer-Douglas-Peucker 算法:该算法是基于 Douglas-Peucker 算法的改进版本,它可以根据指定的阈值来控制轮廓逼近的程度。
Bezier 曲线逼近:该算法是基于 Bezier 曲线的逼近方法,它可以生成更加平滑的轮廓。
在 OpenCV 中常用 approxPolyDP() 函数来实现轮廓逼近。该函数使用的是 Douglas-Peucker 算法。
void approxPolyDP( InputArray curve,
OutputArray approxCurve,
double epsilon, bool closed );第一个参数 curve:表示输入曲线,可以是 Point 数组或 Mat 矩阵。
第二个参数 approxCurve:表示输出多边形,可以是 Point 数组或 Mat 矩阵。
第三个参数 epsilon:表示近似的精度,表示原始曲线与近似曲线之间的最大距离。该值越小,精度越高。
第四个参数 closed:表示近似的曲线为封闭曲线。
Douglas-Peucker 算法首先从曲线的首尾两点开始,然后不断地寻找离曲线最近的点,并将该点添加到近似曲线中。
算法步骤如下:
初始化:设置曲线的首尾两点 A 和 B。
计算曲线上离直线 AB 距离最大的点 C。
比较距离 C 到 AB 的距离与给定阈值 epsilon 的大小。
a. 如果距离小于 epsilon,则直线 AB 作为曲线的近似,算法结束。
b. 如果距离大于 epsilon,则将 C 添加到近似曲线中,并将直线 AB 分为两个段,分别为 AB 和 AC。
重复步骤 2 和 3,直到所有点到近似曲线的距离都小于 epsilon。
下面的例子,分别画了一个正方形、三角形、五边形和圆,通过轮廓查找找到它们的轮廓后,使用 approxPolyDP() 函数对轮廓逼近成多边形。
#include <iostream>
#include <opencv2/opencv.hpp>
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace std;
using namespace cv;
bool ascendSort(vector<Point> a,vector<Point> b)
{
return contourArea(a) > contourArea(b);
}
int main(int argc, char **argv) {
Mat image(1600, 1600, CV_8UC3, Scalar(0, 0, 0));
// 画一个正方形
rectangle(image, Point(100, 100), Point(400, 400), Scalar(255, 255, 0), -1);
// 画一个三角形
Point trianglePoints[3] = {Point(500, 800), Point(250, 1300), Point(800, 1100)};
fillConvexPoly(image, trianglePoints, 3, Scalar(255, 255, 0));
// 画一个五边形
Point pentagonPoints[5];
for (int i = 0; i < 5; i++) {
pentagonPoints[i] = Point(600 + 200 * cos(2 * CV_PI * i / 5), 600 + 200 * sin(2 * CV_PI * i / 5));
}
fillConvexPoly(image, pentagonPoints, 5, Scalar(255, 255, 0));
// 画一个圆形
circle(image, Point(1200, 1200), 300, Scalar(255, 255, 0), -1);
Mat gray,thresh;
cvtColor(image, gray, cv::COLOR_BGR2GRAY);
threshold(gray,thresh,0,255,THRESH_BINARY | THRESH_OTSU);
imshow("thresh", thresh);
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(thresh, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
sort(contours.begin(), contours.end(), ascendSort);//ascending sort
for (size_t i = 0; i< contours.size(); i++) {
double area = contourArea(contours[i]);
if (area < 1000) {
continue;
}
vector<Point> approx;
double perimeter = arcLength(contours[i], true);
double epsilon = perimeter * 0.01;
approxPolyDP(contours[i], approx, epsilon, true);
int approxSize = approx.size();
cout << "approxSize = " << approxSize << endl;
}
imshow("result", image);
waitKey(0);
return 0;
}执行结果:
approxSize = 16
approxSize = 3
approxSize = 5
approxSize = 4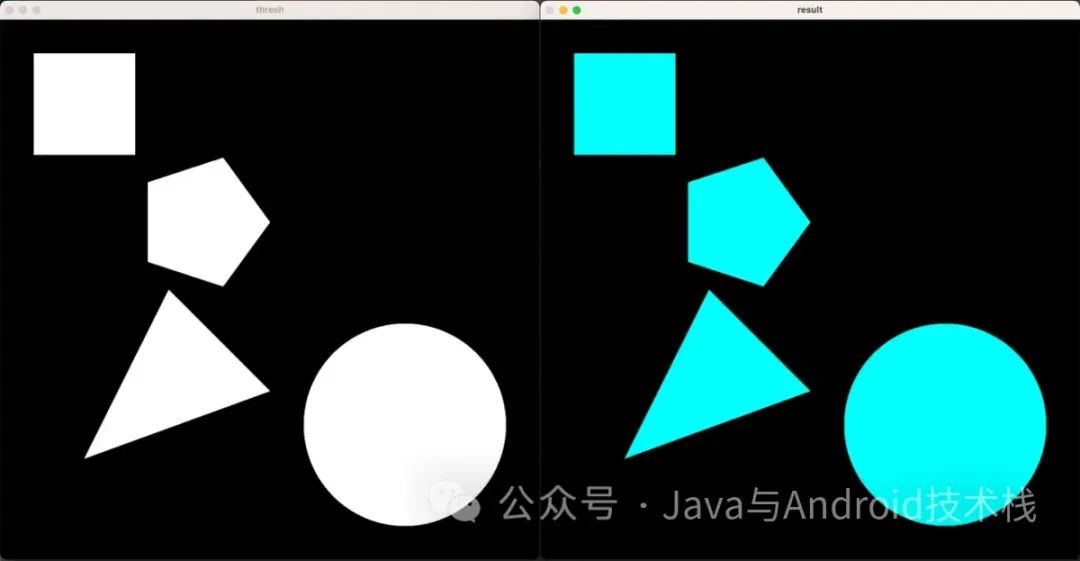
上述代码将圆近似成16边形,后续会介绍可以通过轮廓的矩形度来判断是否是圆形。
Part55. 总结
轮廓是图像中物体的边界,轮廓拟合是将轮廓近似为一系列点或多边形,有利于提取、描述和分析物体的形状,提高轮廓的鲁棒性,或简化轮廓的后处理。后续还会介绍椭圆拟合、直线拟合等等。
【Java与Android技术栈】公众号
关注 Java/Kotlin 服务端、桌面端 、Android 、机器学习、端侧智能
更多精彩内容请关注:














 1119
1119











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









