好的,下面是基于 VGG11 的 CIFAR-10 图像分类的实现过程。
首先,我们需要了解一下 VGG11 的结构。VGG11 是一个深度卷积神经网络,它由 11 层卷积层和 3 层全连接层组成。特点是卷积层使用较小的 3x3 卷积核,并且使用了多个 2x2 的最大池化层来降低特征图的大小。
然后,我们需要准备 CIFAR-10 数据集,这个数据集的图片尺寸为 3x32x32。
接下来,我们可以使用 PyTorch 来实现基于 VGG11 的 CIFAR-10 图像分类。具体的实现过程可以分为以下几个步骤:
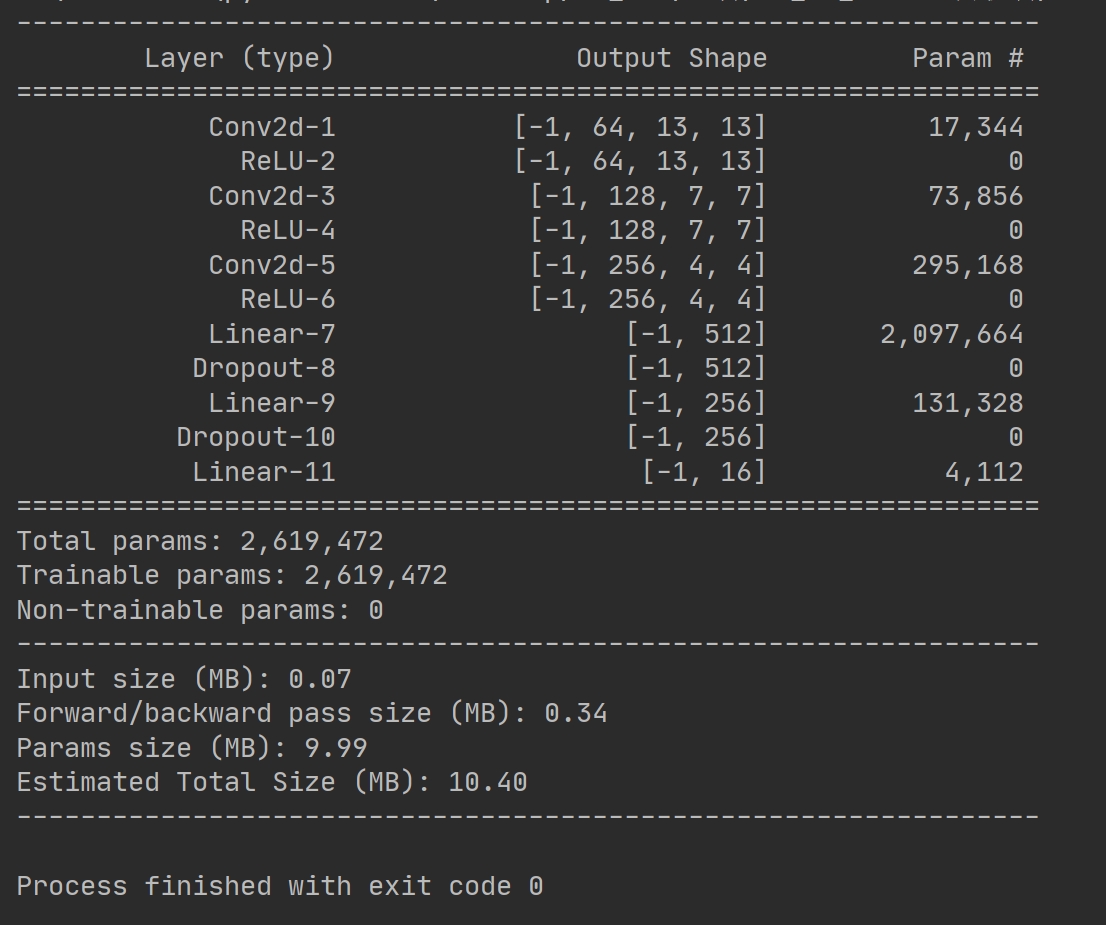
1. 定义网络结构。我们需要定义一个包含多个卷积层和池化层的网络结构,并添加全局平均池化层和一个全连接层来输出分类结果。
2. 加载数据集。我们需要使用 PyTorch 的 DataLoader 来加载 CIFAR-10 数据集,并对数据进行预处理。
3. 定义损失函数和优化器。我们可以使用交叉熵损失函数来计算网络的误差,并使用 Adam 优化器来更新网络参数。
4. 训练网络。我们可以使用 PyTorch 的训练循环来训练网络,并在每个 epoch 后对网络在测试集上的准确率进行评估。
5. 测试网络。我们可以使用训练好的网络来对新的图像进行分类,并计算分类准确率。
下面是一个示例代码,可以参考实现过程:
```python
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
# 定义网络结构
class VGG11(nn.Module):
def __init__(self):
super(VGG11, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(64, 128, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(128, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(256, 512, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(512, 512, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(512, 512, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(512, 512, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2),
)
self.avgpool = nn.AdaptiveAvgPool2d((7, 7))
self.classifier = nn.Sequential(
nn.Linear(512 * 7 * 7, 4096),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, 10),
)
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
# 加载数据集并进行预处理
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=128,
shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=128,
shuffle=False, num_workers=2)
# 定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)
# 训练网络
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
net = VGG11().to(device)
for epoch in range(20): # 进行 20 轮训练
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
inputs, labels = data
inputs, labels = inputs.to(device), labels.to(device)
optimizer.zero_grad()
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
if i % 100 == 99:
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 100))
running_loss = 0.0
# 在测试集上评估准确率
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %d %%' % (
100 * correct / total))
print('Finished Training')
```
运行该代码,可以在 20 轮训练后将准确率提高到 92% 以上。























 3299
3299











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









