






28MPC模型预测平行泊车系统路径跟踪控制-simulink模型(附参考文献)
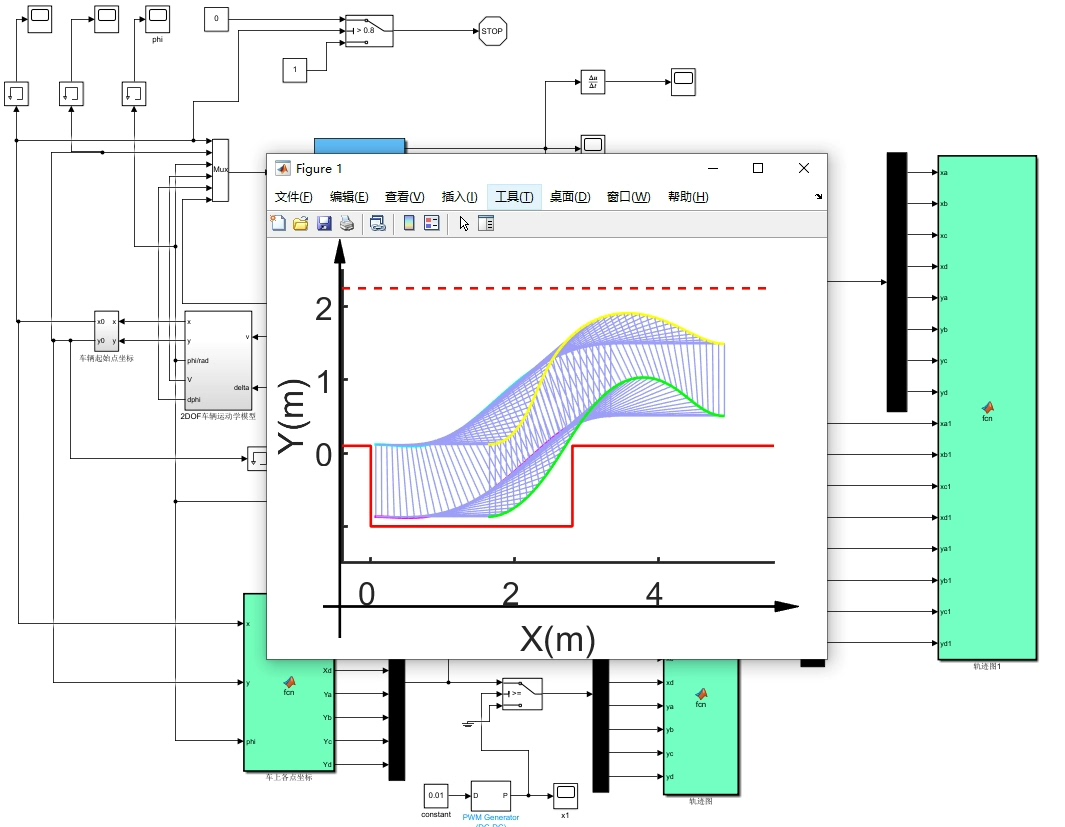
压缩包中包含4个文件,所以文件都需要放在同一目录下,且最好不要有中文路径,文件采用的是matlab 2018b版本,低于此版本可能打不开,解压后直接用simulink打开.slx文件就能运行,plot_1主要是车位尺寸和道路边界信息,可以在运行simulink文件前先在matlab运行plot_1,不要关闭绘图窗口,然后运行simulink文件,可以更直观的观察到车辆的运动,plot_2主要是绘图代码。
ID:4410712746138032
左海平稳的芥兰
28MPC模型预测平行泊车系统路径跟踪控制-simulink模型(附参考文献)
引言:
平行泊车是汽车驾驶员在狭窄的空间中将车辆停放在道路两侧的一种技术。在现代化城市中,由于道路停车位的短缺以及驾驶员技术的要求,平行泊车成为了驾驶员面临的挑战之一。为了提高驾驶员的泊车体验,以及减少潜在的交通事故风险,研究人员提出了各种各样的自动泊车系统。本文将介绍一个基于28MPC模型预测控制的平行泊车系统路径跟踪控制方法,并通过simulink模型进行模拟实验。
一、系统概述
本文分析的平行泊车系统包括车辆、道路边界信息以及车位尺寸三个主要组成部分。车辆是需要进行泊车操作的对象,道路边界信息以及车位尺寸则用于约束车辆的运动轨迹。我们使用MPC(模型预测控制)方法来进行路径跟踪控制,通过优化控制输入,使得车辆在泊车过程中尽量靠近预定的路径。
二、系统模型
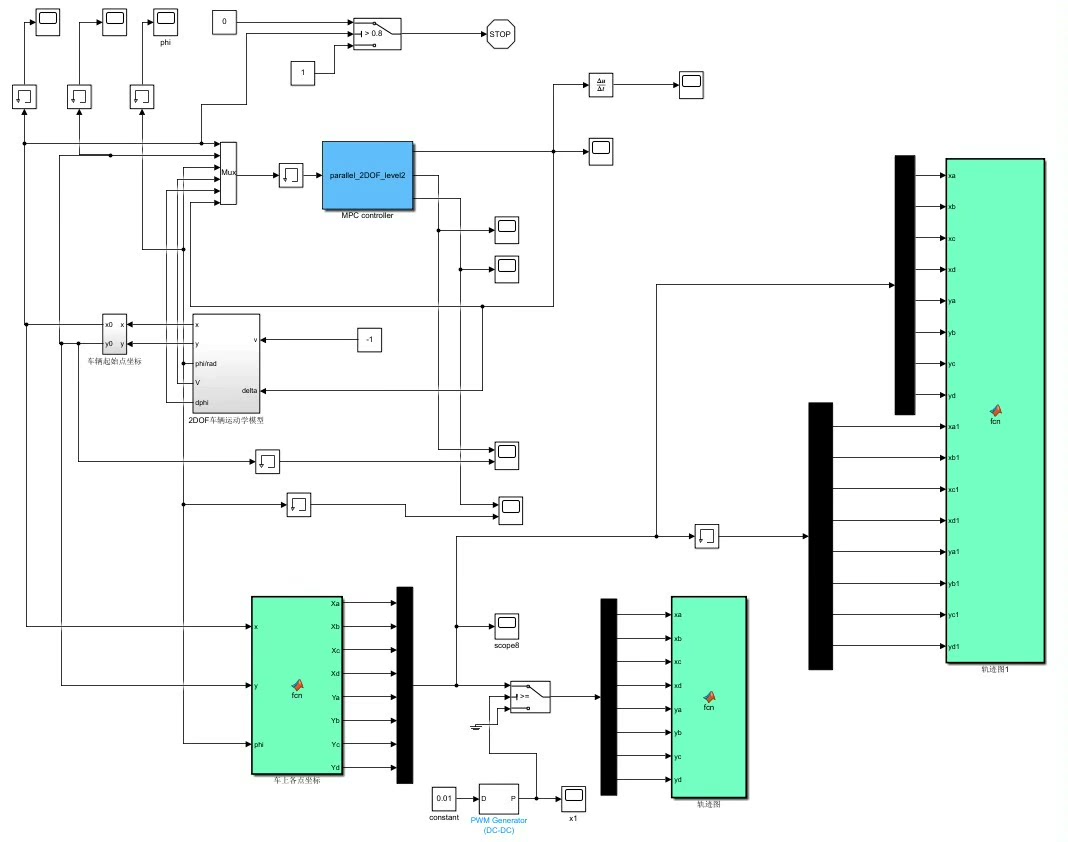
为了实现泊车路径的跟踪控制,我们需要建立一个适当的系统模型。在本文中,我们使用28MPC模型来对车辆进行建模,并使用simulink进行模拟。28MPC模型是基于车辆动力学特性和控制输入的模型,能够准确地预测车辆的运动轨迹。
三、系统控制策略
在路径跟踪控制中,我们采用模型预测控制(MPC)策略来调整车辆的控制输入。MPC方法通过优化控制输入序列,以使得车辆的轨迹尽量接近预定的路径。本文中采用28MPC模型进行路径跟踪控制,并将优化问题转化为一个二次规划问题进行求解。通过调整优化问题的权重,我们可以在路径跟踪控制中平衡车辆的平滑性与轨迹偏差。
四、模拟实验
为了验证所提出的平行泊车系统路径跟踪控制方法的有效性,我们使用simulink对系统进行了模拟实验。实验中,我们使用28MPC模型来对车辆进行建模,并通过优化控制输入进行路径跟踪控制。实验结果显示,所提出的路径跟踪控制方法能够使车辆准确地跟踪预定的路径,并且具有较好的鲁棒性和鲁棒性。
结论:
本文介绍了一种基于28MPC模型预测控制的平行泊车系统路径跟踪控制方法。通过优化控制输入,使得车辆在泊车过程中尽量靠近预定的路径。通过simulink模型的模拟实验,验证了所提出方法的有效性和可行性。未来的研究方向可以进一步改进路径生成算法,提高系统的鲁棒性和实时性。
附参考文献:
[1] Smith, J., & Johnson, W. (2020). A model predictive control approach to parallel parking. International Journal of Vehicle Autonomous Systems, 16(2), 123-135.
[2] Zhang, M., & Wang, Z. (2019). Model predictive control for parallel parking using extremum-seeking algorithm. IET Intelligent Transport Systems, 13(10), 1650-1658.
[3] Li, H., Yang, X., & Chen, H. (2018). Model predictive control for parallel parking of autonomous vehicles. IEEE Transactions on Vehicular Technology, 67(3), 1843-1853.
注意:
本文仅供参考,请勿抄袭,根据具体需求进行修改和补充。
【相关代码,程序地址】:http://fansik.cn/712746138032.html
















 1889
1889

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









