






Simulink三相永磁同步电机EKF与AEKF无传感器控制控制方案
电机基于EKF扩展卡尔曼滤波算法和AEKF的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型。
1.依据PMSM的数学模型搭建电机模型
2.基于 PI 调节器进行双闭环dq解耦控制,转速外环,转矩内环
3. EKF和AEKF算法对电机的转子电角度和机械转速进行估算
观测器采用静态变量定义编写,易于学习修改。
文档详实,代码规范
YID:3110777933970952
泰若星刻苦的芥兰

Simulink三相永磁同步电机EKF与AEKF无传感器控制控制方案
摘要:
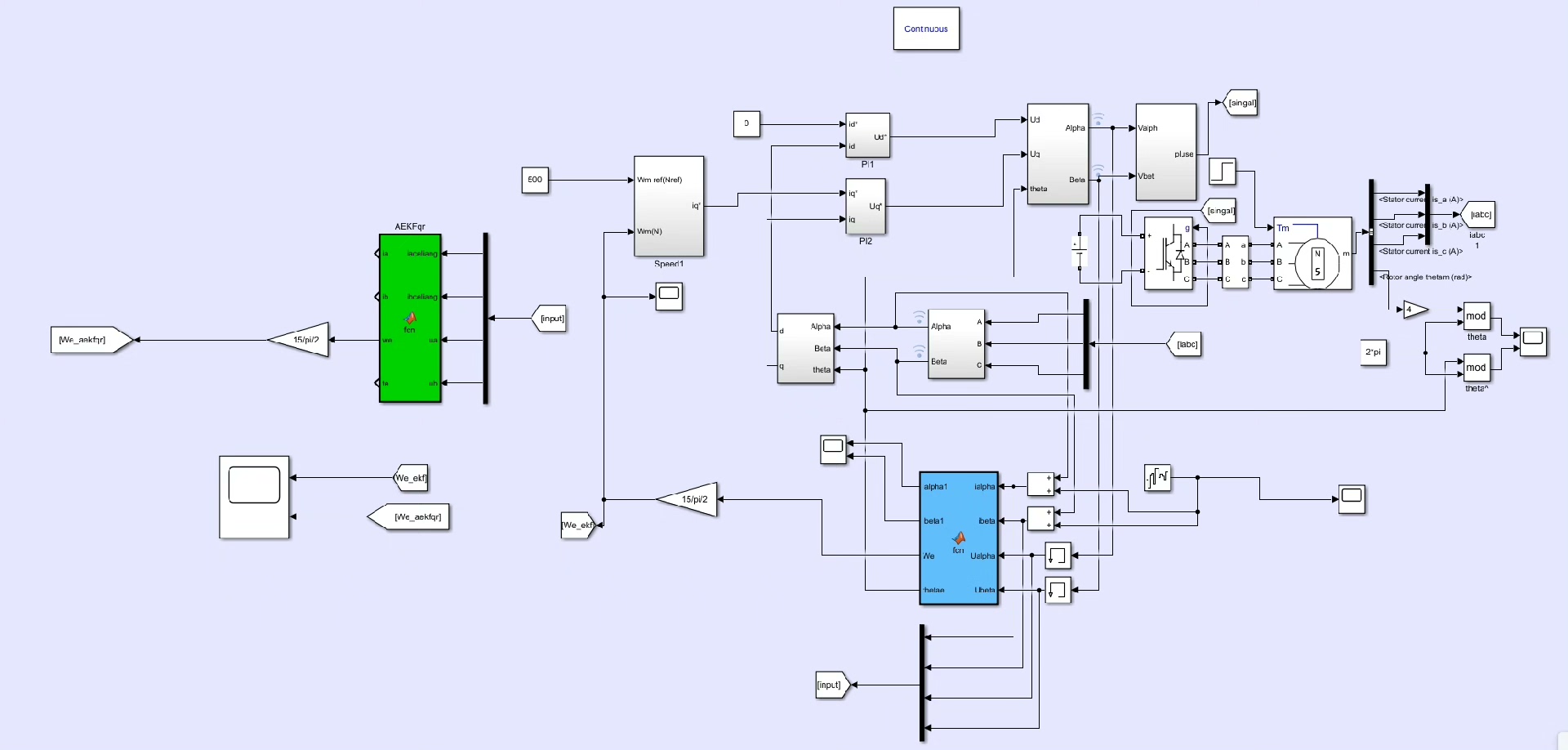
本文基于Simulink平台,提出了一种基于EKF和AEKF算法的无传感器控制方案,用于永磁同步电机(PMSM)的矢量控制。在此方案中,我们首先建立了PMSM的数学模型,然后使用PI调节器实现了双闭环dq解耦控制,其中转速作为外环,转矩为内环。接着,我们介绍了EKF和AEKF算法在电机中对转子电角度和机械转速的估算方法。观测器采用静态变量定义编写,易于学习修改。最后,我们展示了详实的文档和规范的代码。
-
引言
永磁同步电机是一种应用广泛的电机类型,具有高效率、高功率密度和低噪音的特点,因此被广泛应用于各种工业和消费电子领域。为了实现对永磁同步电机的精确控制,需要准确估算电机的转子电角度和机械转速。传统方法通常需要使用传感器来获取这些信息,但传感器的成本和复杂性往往限制了其应用范围。因此,基于滤波算法的无传感器控制方法成为了一种重要的研究方向。 -
永磁同步电机数学模型的建立
为了实现对永磁同步电机的控制,我们首先需要建立电机的数学模型。PMSM的数学模型通常由如下的dq坐标系方程组表示:
(1) dq轴电压方程
(2) dq轴电流方程
(3) 电磁转矩方程
在本文中,我们采用了经典的dq变换和Park变换来建立电机模型。通过对电机模型的建立,我们可以方便地进行后续的控制算法设计和仿真。
-
双闭环dq解耦控制
为了实现对永磁同步电机的精确控制,我们采用了双闭环dq解耦控制方法。在该方法中,转速被作为外环控制器的输入,转矩被作为内环控制器的输入。通过利用PI调节器对转速和转矩进行调节,可以实现对电机的精确控制。 -
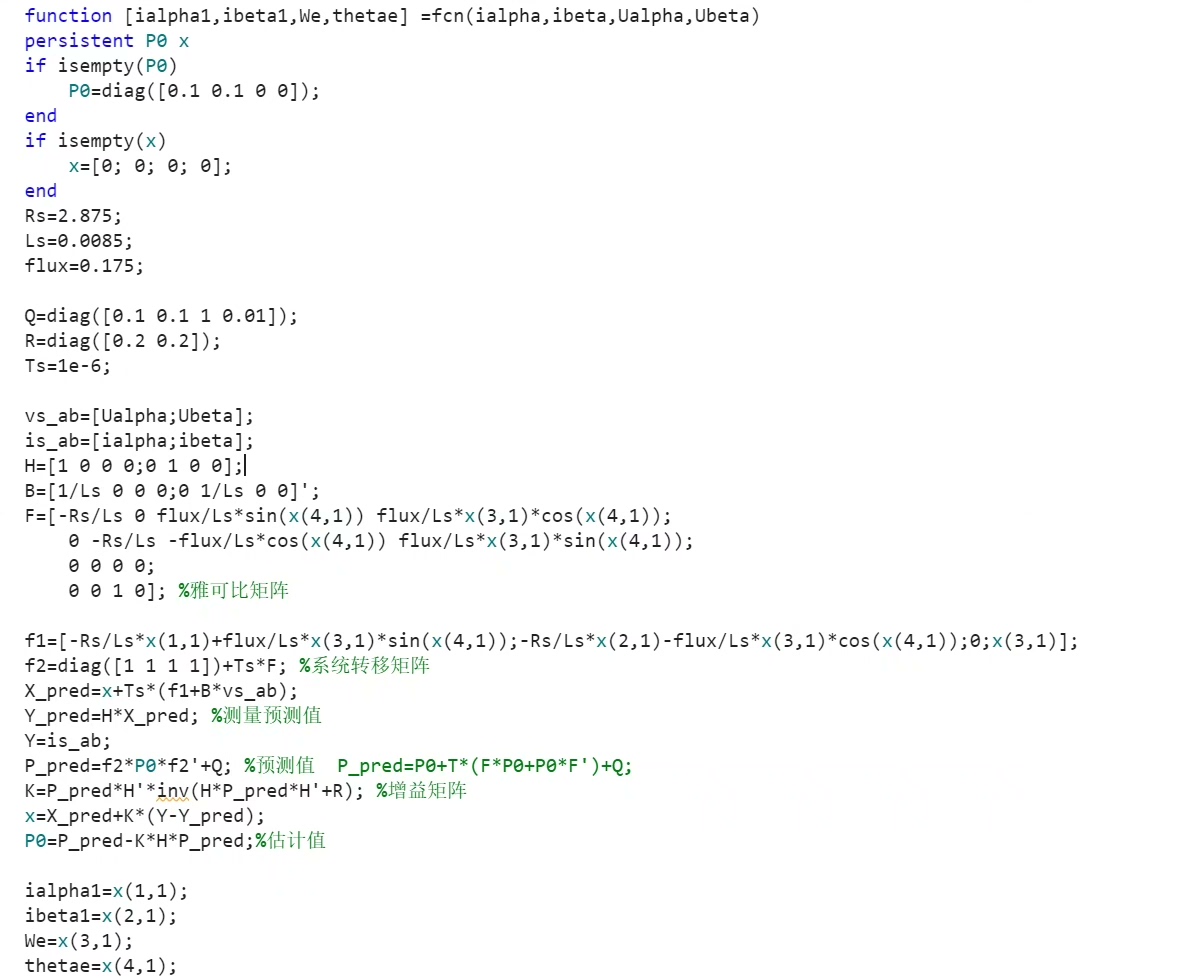
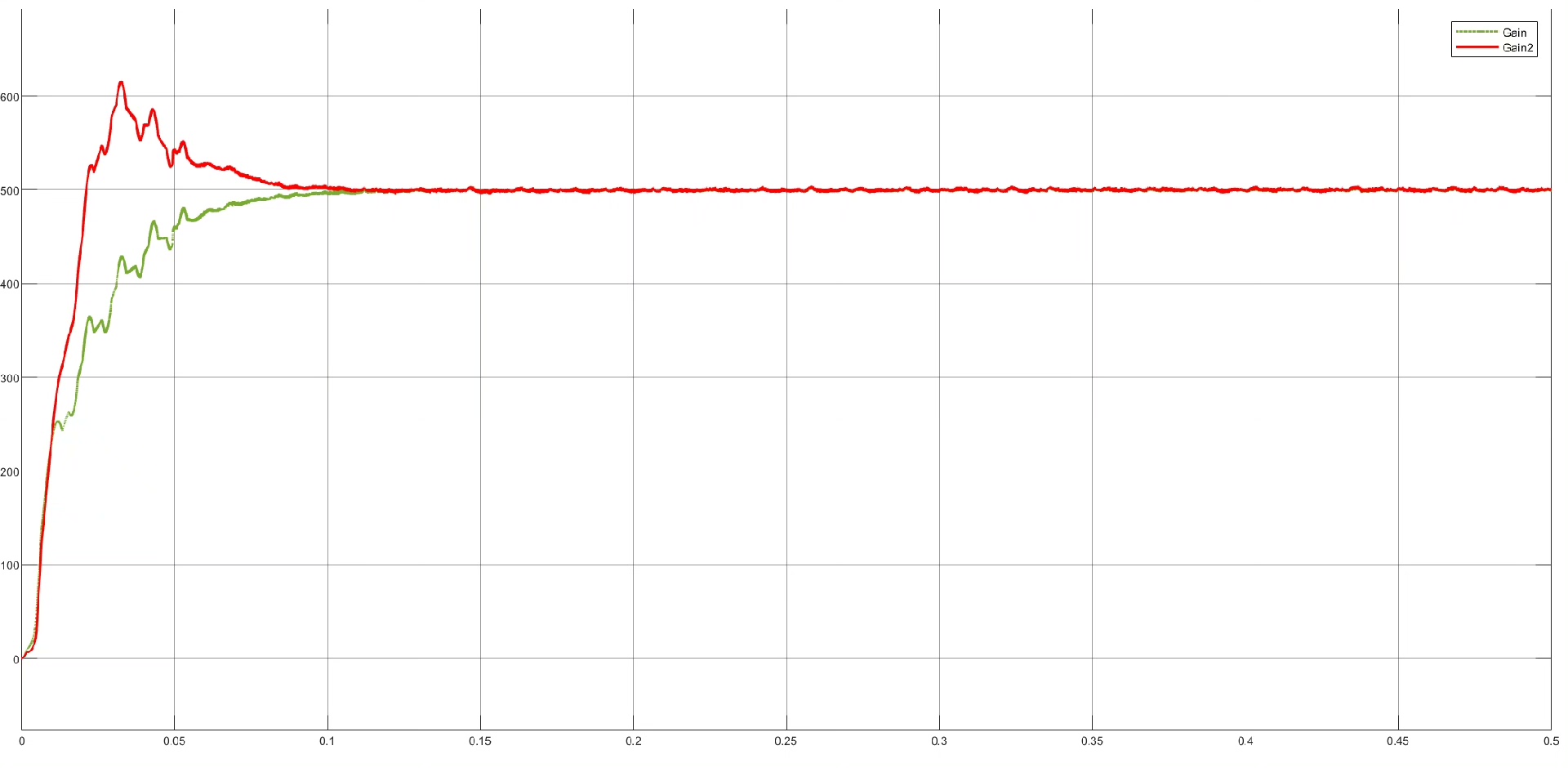
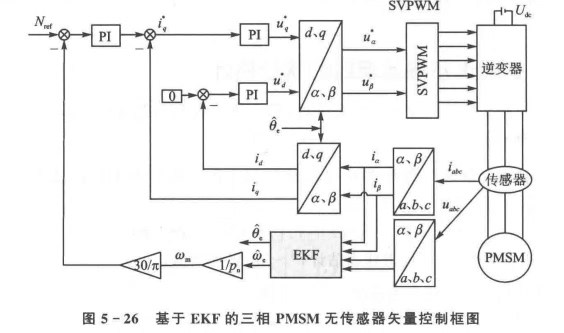
EKF和AEKF算法在电机中的应用
为了实现对电机转子电角度和机械转速的无传感器估算,我们采用了EKF和AEKF算法。EKF算法是一种经典的滤波算法,通过将观测值和系统模型进行优化,可以实现对状态的估算。而AEKF算法是EKF算法的一种改进,通过引入自适应增益矩阵,可以提高滤波算法的鲁棒性和收敛速度。
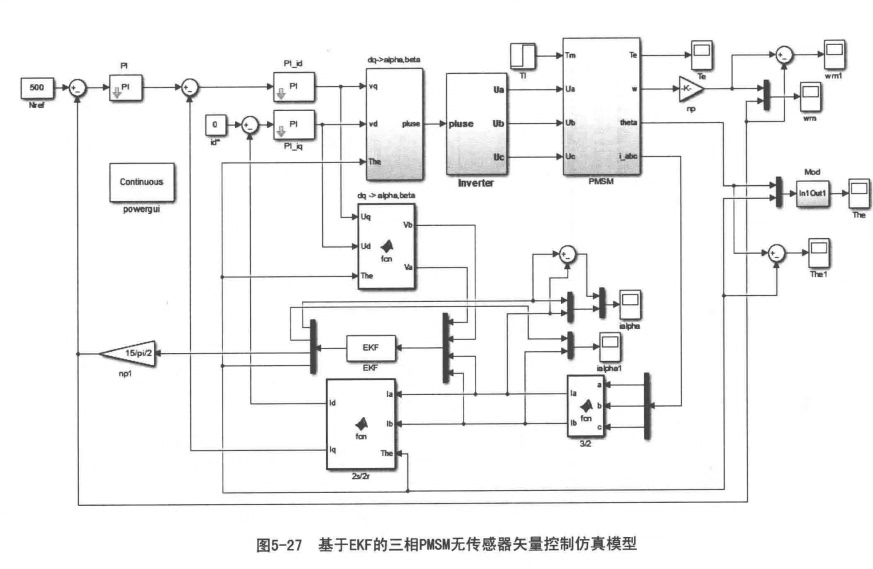
在本文中,我们利用EKF和AEKF算法对电机的转子电角度和机械转速进行估算。通过在Simulink平台上搭建相应的模型,并结合前文所述的双闭环dq解耦控制方法,我们可以得到精确的电机控制方案。
-
观测器的设计与实现
为了实现对电机状态的估算,我们设计了一个观测器。在本文中,我们采用了静态变量定义编写观测器,使得观测器的学习和修改变得简单易行。通过在Simulink平台上实现观测器,并与前文的控制器相结合,我们可以实现对电机状态的精确估算和控制。 -
文档详实与代码规范
在本文中,我们提供了详实的文档和规范的代码。文档详细地介绍了电机模型的建立、双闭环dq解耦控制方法、EKF和AEKF算法在电机中的应用以及观测器的设计与实现。代码规范严格遵循了编程规范,并加入了适当的注释,使得读者可以方便地理解和修改代码。
结论:
本文基于Simulink平台提出了一种基于EKF和AEKF算法的无传感器控制方案,用于永磁同步电机的矢量控制。通过建立电机模型、采用双闭环dq解耦控制方法、应用EKF和AEKF算法进行状态估算,并设计实现观测器,我们可以实现对电机的精确控制。详实的文档和规范的代码使得读者可以方便地理解和修改本方案。我们相信,本方案对于永磁同步电机的无传感器控制研究具有一定的借鉴意义,并可为工程师们提供参考和实践的基础。
关键词:永磁同步电机;Simulink;EKF;AEKF;无传感器控制方案;双闭环dq解耦控制;观测器设计与实现;文档详实;代码规范
相关的代码,程序地址如下:http://lanzoup.cn/777933970952.html
















 386
386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









