






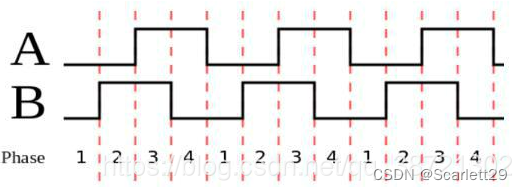
旋转编码器产生A B两个脉冲信号,通过STM32配置定时器检测编码器的速度及正反转。通过软件的方法实现四倍频,A B脉冲相差90度,A脉冲占据4个单位时间,B脉冲占据4个单位时间,当定时器同时检测A B脉冲,会提高分辨率,周期变为2个单位时间。
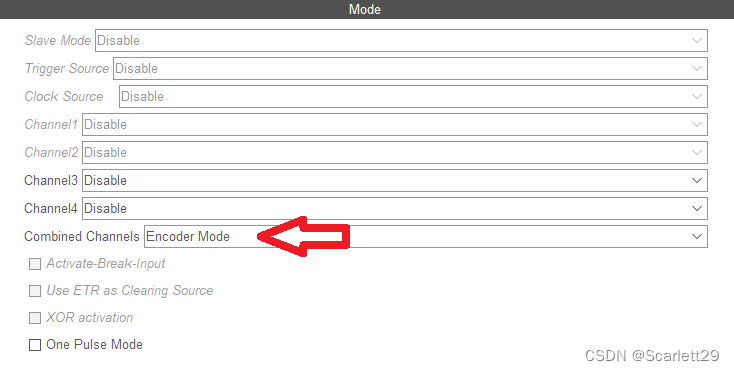
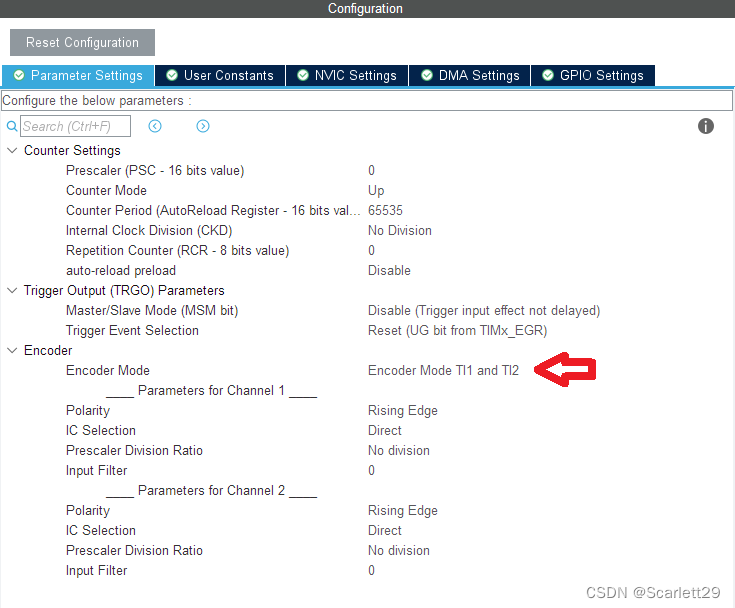
配置HAL的TIM模式及编码器模式。
敲代码
编写int getTimEncoder(void)接收定时器的数字。在一个时间段内,检测编码器脉冲数后,需定时器要重新置零。
重点:正反转需要强制类型转换(short)(__HAL_TIM_GET_COUNTER(&htim1)),变成一个有符号类型。如反转是会输出65500多的数字,强制类型转换后变成一个负数。
int getTimEncoder(void)
{
int iTimerEncoder = 0;
iTimerEncoder = (short)(__HAL_TIM_GET_COUNTER(&htim1)); //强制类型转换为short,分辨正反转
__HAL_TIM_SET_COUNTER(&htim1, 0); //重新TIM计数器设置为0,避免计数器溢出
return iTimerEncoder;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
int encoder = 0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_USART1_UART_Init();
MX_I2C2_Init();
/* USER CODE BEGIN 2 */
printf("编码器测试程序!\n");
HAL_TIM_Encoder_Start(&htim1, TIM_CHANNEL_ALL); //启动定时器
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
encoder = getTimEncoder();
printf("TIM1编码器模式捕获的脉冲数: %d \r\n", encoder);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}













 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









