







串口中断介绍
串口简介
UART(Universal Asynchronous Receiver/Transmitter)通用异步收发传输器,UART 作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。是在应用程序开发过程中使用频率最高的数据总线。
UART 串口的特点是将数据一位一位地顺序传送,只要 2 根传输线就可以实现双向通信,一根线发送数据的同时用另一根线接收数据。UART 串口通信有几个重要的参数,分别是波特率、起始位、数据位、停止位和奇偶检验位,对于两个使用 UART 串口通信的端口,这些参数必须匹配,否则通信将无法正常完成。UART 串口传输的数据格式如下图所示:

-
起始位:表示数据传输的开始,电平逻辑为 “0” 。
-
数据位:可能值有 5、6、7、8、9,表示传输这几个 bit 位数据。一般取值为 8,因为一个 ASCII 字符值为 8 位。
-
奇偶校验位:用于接收方对接收到的数据进行校验,校验 “1”
的位数为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性,使用时不需要此位也可以。 -
停止位: 表示一帧数据的结束。电平逻辑为 “1”。
-
波特率:串口通信时的速率,它用单位时间内传输的二进制代码的有效位(bit)数来表示,其单位为每秒比特数
-
bit/s(bps)。常见的波特率值有 4800、9600、14400、38400、115200等,数值越大数据传输的越快,波特率为
-
115200 表示每秒钟传输 115200 位数据。
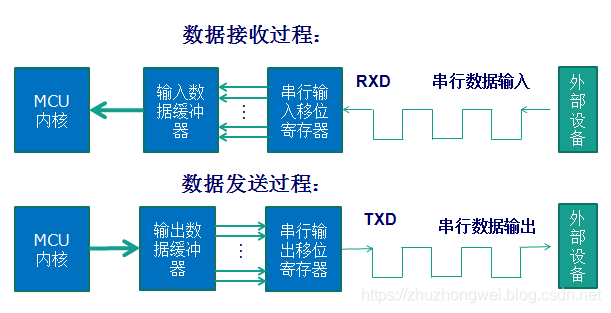
串口通信过程
空闲中断介绍
STM32的IDLE的中断在串口无数据接收的情况下,是不会一直产生的,产生的条件是这样的,当清除IDLE标志位后,必须有接收到第一个数据后,才开始触发,一断接收的数据断流,没有接收到数据,即产生IDLE中断。IDLE位不会再次被置高直到RXNE位被置起(即又检测到一次空闲总线)。RXNE接收中断可以不用开启,减少进中断的次数。
代码案列
串口配置
/* Config IDLE Interrupt To LPUART1 */
if(uart->UartHandle.Instance == LPUART1)
{
__HAL_UART_ENABLE_IT(&uart->UartHandle, UART_IT_IDLE);
}
中断接收
void LPUART1_IRQHandler(void)
{
struct stm32_uart *uart;
int ch;
uart = &lpuart1;
/* enter interrupt */
// rt_interrupt_enter();
if((l_serial.parent.open_flag & RT_DEVICE_FLAG_INT_RX))
{
HAL_UART_IRQHandler(&uart->UartHandle);
ch = -1;
ch = uart->UartHandle.Instance->RDR & 0xff;
lpuart_recv_buff[recv_len++] = ch;
/* 空闲中断来时 */
if(__HAL_UART_GET_FLAG(&uart->UartHandle,UART_FLAG_IDLE)!=RESET)
{
recv_len--;
__HAL_UART_CLEAR_IDLEFLAG(&uart->UartHandle);
uart_rx_idle_callback(lpuart_recv_buff,recv_len);
// rt_memset(lpuart_recv_buff,0,sizeof(lpuart_recv_buff));
recv_len = 0;
}
}
if(recv_len >= 300)
{
recv_len = 0;
}
/* leave interrupt */
//rt_interrupt_leave();
}
回调函数
void uart_rx_idle_callback(uint8_t *pData,int size)
{
/* If recvive byte > 5, judge valid */
if(size > 5)
{
debug_uart_recv_data_parse(pData,size);
}
}
数据处理
/*
* lpuart Serial interrupt receive callback function
* Format:HEAD(1B)+ CMD(1B)+ LEN(2B)+ DATA + CS(1B)
*/
bool debug_uart_recv_data_parse( uint8_t *pData, uint16_t Size)
{
debug_uart_package_t debug_frame = {0};
rz_reset_info_t *pobj = rz_reset_info_get();
// printf_debug_log("recv_data_parse",pData,Size);
/* Step1: Judge the length of received data*/
debug_frame.recv_buf = pData;
if(debug_frame.recv_buf == NULL) {
rt_kprintf("recv_buff NULL error \r\n");
return false;
}
debug_frame.recv_len = Size;
if(debug_frame.recv_len > MAX_EFR_LENGTH ) {
rt_kprintf("Receive data length error \r\n");
return false;
}
#if 1
debug_frame.head = debug_frame.recv_buf[0];
debug_frame.check_sum = rz_cs_check_sum_data(debug_frame.recv_buf,debug_frame.recv_len-1);
/* Step2: Judge the content of received data */
if(debug_frame.head != EFR_HEAD && debug_frame.check_sum != debug_frame.recv_buf[debug_frame.recv_len] ) {
rt_kprintf("recv head error || check sum error\r\n");
return false;
}
/* Step3:Check Mudule */
if(pobj->init == NULL ){
rt_kprintf(" Module Init failed\r\n");
return false;
}
#endif
recvive_complete_flag = true;
g_lpuart_obj.lpuart_recv_len = debug_frame.recv_len;
rt_memcpy (g_lpuart_obj.lpuart_recv_buf, debug_frame.recv_buf , debug_frame.recv_len);
return true;
}

















 2014
2014

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









