






1-1西门子S7-1200博图程序案例, PID 恒温恒压供冷却水程序.触摸屏画面TP1200组态。
霍尼韦尔电动比例阀PID控制水温,与两台西门子v20变频器模拟量PID控制水压。
包括程序和Eplan源档图纸.程序版本TIA V14及以上。
YID:453727425992686
PLC电气工程师
西门子S7-1200博图程序案例,PID恒温恒压供冷却水程序
摘要:本文将介绍一个基于西门子S7-1200 PLC的博图程序案例,该程序实现了对冷却水的PID恒温恒压控制。其中,霍尼韦尔电动比例阀用于控制水温,而两台西门子V20变频器则用于模拟量PID控制水压。本文将详细介绍该程序的设计思路和实现过程,并附上程序和Eplan源档图纸。
关键词:西门子S7-1200、博图程序、PID控制、恒温恒压、冷却水、霍尼韦尔电动比例阀、西门子V20变频器、TIA V14
-
引言
随着工业自动化技术的发展,PLC(可编程逻辑控制器)在工业控制领域中发挥着重要作用。西门子S7-1200是一款功能强大、易于编程的PLC,广泛应用于各个行业的自动化系统中。本文将以一个冷却水控制系统为例,展示S7-1200的博图程序设计能力。 -
系统概述
本案例中,我们需要实现对冷却水的PID恒温恒压控制。具体而言,我们需要控制水温在设定值附近波动,同时保持水压稳定。为了实现这一目标,我们选择了霍尼韦尔电动比例阀和西门子V20变频器作为控制元件。 -
设计思路
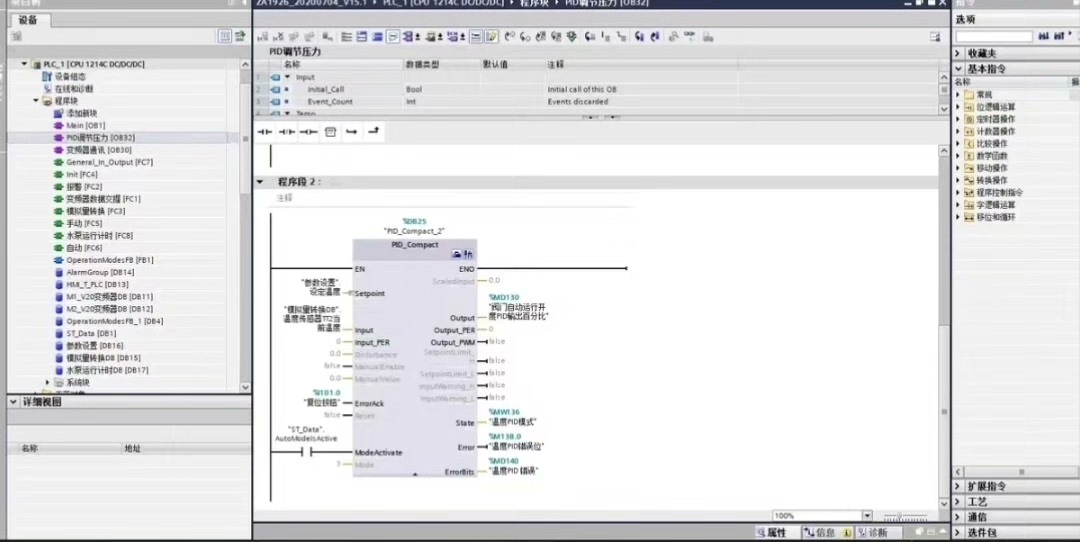
3.1 温度控制
为了实现恒温控制,我们使用了PID控制算法。首先,我们通过传感器采集冷却水的温度信号,并传输给S7-1200 PLC。PLC内部的PID算法根据当前温度与设定温度之间的差异,计算出合适的控制量,并通过PWM信号控制霍尼韦尔电动比例阀的开度。通过不断调整比例阀的开度,我们可以使得水温保持在设定值附近。
3.2 压力控制
与温度控制类似,压力控制也采用了PID算法。我们使用两台西门子V20变频器来控制水压。变频器接收来自压力传感器的模拟信号,并将其转换为电压信号传输给S7-1200 PLC。PLC内部的PID算法根据当前压力与设定压力之间的差异,计算出合适的频率给变频器,从而调整水压。
- 程序设计
本案例的程序使用西门子TIA V14及以上版本进行编程。具体的程序设计结构如下:
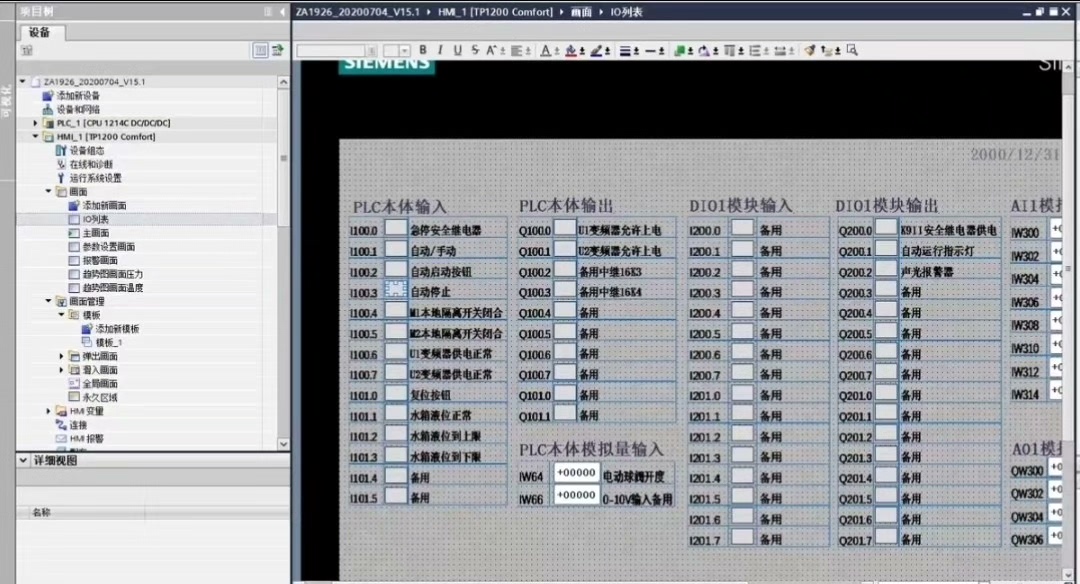
4.1 硬件配置
首先,我们需要对PLC进行硬件配置。根据实际情况,我们将定义输入输出模块、温度传感器、压力传感器、霍尼韦尔电动比例阀和西门子V20变频器等硬件配置参数。
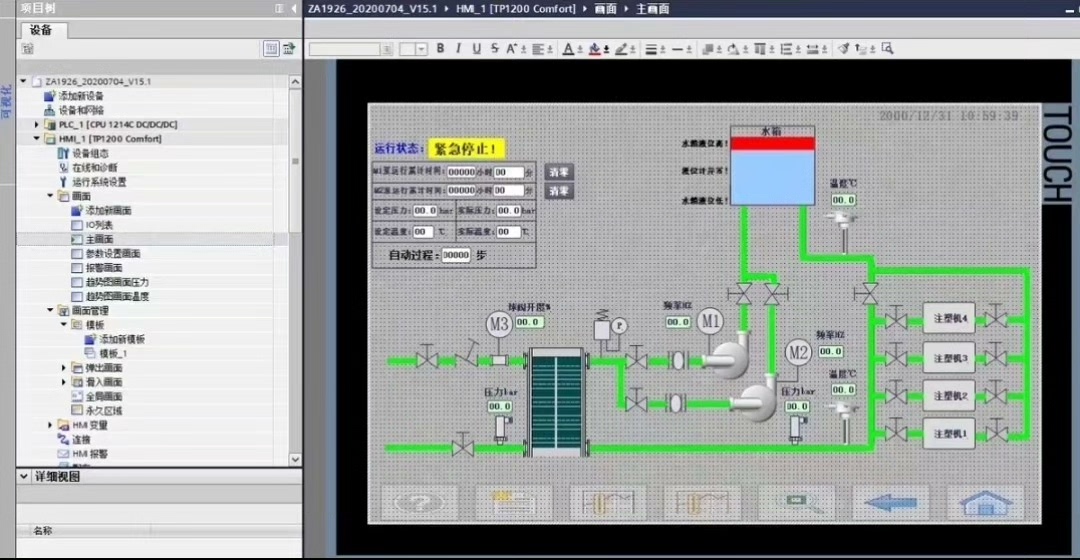
4.2 程序逻辑
接下来,我们需要设计程序的逻辑结构。首先,我们将采集温度和压力传感器的数据,并进行处理。然后,根据PID算法计算出控制量并输出给比例阀和变频器。最后,根据控制结果,我们将更新触摸屏画面TP1200的组态,显示当前的温度和压力。
-
源档图纸
为了方便读者理解本案例,我们提供了相应的Eplan源档图纸。读者可以根据图纸进行相应的连接和配置。 -
结论
本文通过一个冷却水控制系统的案例,演示了基于西门子S7-1200 PLC的博图程序设计能力。通过PID恒温恒压控制,我们能够实现对冷却水温度和压力的精确控制。希望本文对读者在PLC程序设计方面提供一定的指导和借鉴作用。
参考文献:
[1] 西门子S7-1200系列PLC编程手册
[2] 西门子TIA V14编程软件使用手册
以上相关代码,程序地址:http://wekup.cn/727425992686.html















 1838
1838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









