






1、安装适配的jdk版本
2、下载grew,官网命令下载(直接粗暴)
Homebrew — The Missing Package Manager for macOS (or Linux)
 copy红色框内部的代码,直接命令行下载。
copy红色框内部的代码,直接命令行下载。
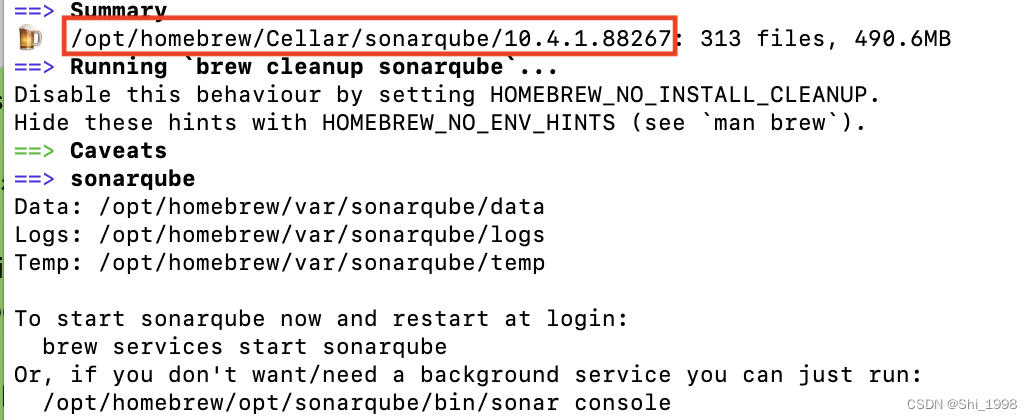
3、下载安装包
brew install sonarqube(需要等待一两个小时)
brew install sonar-scanner(较快)
记录下sonarqube以及scanner的地址信息,红色框框(summary模块记录sonarqube以及版本,下载方式不同此信息会有出入)
scanner信息,红色框框

4、配置环境变量
4.1 获取java安装路径:/usr/libexec/java_home -V
命令:/usr/libexec/java_home -V

需要保存该jdk位置信息,后续配置环境需要使用
4.2配置sonar
4.2.1 进入 sonarqube 的 conf 目录
命令:cd /usr/local/Cellar/sonarqube/9.1.0.47736/libexec/conf
命令:vim sonar.properties
添加如下配置:
sonar.host.url=http://localhost:9000/sonarqube
#web登陆账号和密码
sonar.login=admin
sonar.password=admin
4.2.2 vim 命令打开 wrapper.conf
命令:vim wrapper.conf
添加:
wrapper.java.command=4.1章获取的jdk地址
4.2.3 配置全局环境
Java路径:4.1获取的jdk地址
sonarqube路径:3获取的文件路径
sonar-scanner路径:3获取的文件路径
# Java
export JAVA_HOME=/Library/Java/JavaVirtualMachines/jdk-17.0.5.jdk/Contents/Home(替换自己的)
export CLASSPAHT=.:$JAVA_HOME/lib/dt.jar:$JAVA_HOME/lib/tools.jar
export PATH=$PATH:JAVA_HOME/bin# Sonar
export SONAR_HOME=/Users/xxx/xxx/xxx/sonar/sonarqube-9.9.0.65466(替换自己的)
export PATH=$PATH:$SONAR_HOME/bin
export SONAR_SCANNER_HOME=/Users/xxx/xxx/xxx/sonar/sonar-scanner-3.3.0.1492-macosx(替换自己的)
export PATH=$PATH:$SONAR_SCANNER_HOME/bin
# HomeBrew END
4.2.4 确保配置生效
命令:source ~/.bash_profile
4.2.5 终端执行sonar-scanner --version,显示如下即配置成功:
 4.2.6 启动 sonarqube
4.2.6 启动 sonarqube
cd /opt/homebrew/Cellar/sonarqube/10.4.1.88267/bin
./sonar start
查看启动日志:
tail -f /opt/homebrew/Cellar/sonarqube/10.4.1.88267/libexec/logs/sonar.xxx.log(红色部分根据自身情况替换)
关闭 sonarqube:
./sonar stop
启动 sonarqube 后,浏览器打开:http://localhost:9000
初始化默认登录用户名为:admin;密码为:admin(首次登陆可修改)

















 765
765

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









