







状态机模式是一种行为模式,在《设计模式》这本书中对其有详细的描述,通过多态实现不同状态的调转行为的确是一种很好的方法,只可惜在嵌入式环境下,有时只能写纯C代码,并且还需要考虑代码的重入和多任务请求跳转等情形,因此实现起来着实需要一番考虑。
近日在看了一个开源系统时,看到了一个状态机的实现,也学着写了一个,与大家分享。
首先,分析一下一个普通的状态机究竟要实现哪些内容。
状态机存储从开始时刻到现在的变化,并根据当前输入,决定下一个状态。这意味着,状态机要存储状态、获得输入(我们把它叫做跳转条件)、做出响应。
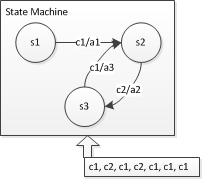
如上图所示,{s1, s2, s3}均为状态,箭头c1/a1表示在s1状态、输入为c1时,跳转到s2,并进行a1操作。
最下方为一组输入,状态机应做出如下反应:
| 当前状态 | 输入 | 下一个状态 | 动作 |
| s1 | c1 | s2 | a1 |
| s2 | c2 | s3 | a2 |
| s3 | c1 | s2 | a3 |
| s2 | c2 | s3 | a2 |
| s3 | c1 | s2 | a3 |
| s2 | c1 | s_trap | a_trap |
| s_trap | c1 | s_trap | a_trap |
当某个状态遇到不能识别的输入时,就默认进入陷阱状态,在陷阱状态中,不论遇到怎样的输入都不能跳出。
为了表达上面这个自动机,我们定义它们的状态和输入类型:
| 1 2 3 4 5 6 7 8 9 10 11 12 |
|
在嵌入式环境中,由于存储空间比较小,因此把它们全部定义成宏。此外,为了降低执行时间的不确定性,我们使用O(1)的跳转表来模拟状态的跳转。
首先定义跳转类型:
| 1 2 3 4 5 6 7 |
|
然后按照上图中的跳转关系,把三个跳转加一个陷阱跳转先定义出来:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
|
其中的动作,由用户自己完成,在这里仅定义一条输出语句。
| 1 2 3 4 |
|
| 1 |
|
| 1 2 3 4 5 6 7 |
|
即可表达上文中的跳转关系。
最后定义状态机,如果不考虑多任务请求,那么状态机仅需要存储当前状态便行了。例如:
| 1 2 3 4 5 6 7 8 9 10 11 12 |
|
但是考虑到当一个跳转正在进行的时候,同时又有其他任务请求跳转,则会出现数据不一致的问题。
举个例子:task1(s1, c1/a1 –> s2)和task2(s2, c2/a2 –> s3)先后执行,是可以顺利到达s3状态的,但若操作a1运行的时候,执行权限被task2抢占,则task2此时看到的当前状态还是s1,s1遇到c2就进入陷阱状态,而不会到达s3了,也就是说,状态的跳转发生了不确定,这是不能容忍的。
因此要重新设计状态机,增加一个“事务中”条件和一个用于存储输入的条件队列。修改后的代码如下:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 |
转:http://www.cnblogs.com/autosar/archive/2012/06/22/2558604.html |















 534
534

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









