






概述
Blob即图像中一组具有某些共同属性(如,灰度值)的连接像素。使用Blob检测可以快速从灰度图像中定位跟提取各种常见的几何形状。Opencv提供了根据面积、灰度值、圆度、凸度、惯量进行过滤得到符合需求的各种Blob形状,实现检测的定位与检测。
1.设置Blob检测器参数
# Setup SimpleBlobDetector parameters
params = cv2.SimpleBlobDetector_Params()Blob对象检测算法,支持一下五种过滤方式:
filterByArea #面积过滤,True表示启用 filterByCircularity #圆度过滤,True表示启用 filterByColor #值过滤,True表示启用 filterByConvexity #凸度过滤,True表示启用 filterByInertia #惯量过滤,True表示启用
2.实例程序(含注释)
# Standard imports
import cv2
import numpy as np
# Read image
im = cv2.imread("blob.jpg", cv2.IMREAD_GRAYSCALE)
# Setup SimpleBlobDetector parameters.
params = cv2.SimpleBlobDetector_Params()
# Change thresholds
params.minThreshold = 10 #自定义下阈值
params.maxThreshold = 200 #自定义上阈值
# Filter by Area.
params.filterByArea = True
params.minArea = 1500 #自定义最小面积(即检测大于此面积的斑点)
# Filter by Circularity 根据圆度过滤(圆的圆度为1,正方形的圆度为0.785,不熟悉圆度的以此为参考):
params.filterByCircularity = False
params.minCircularity = 0.1 #自定义最小圆度
# Filter by Convexity 根据凹凸性过滤(凹凸性=Blob面积/凸包面积):
params.filterByConvexity = False
params.minConvexity = 0.87 #自定义最小凹凸性
# Filter by Inertia 根据惯性比过滤(0<=惯性比<=1):
params.filterByInertia = False
params.minInertiaRatio = 0.01 自定义最小惯性比
# Filter by Color 根据颜色过滤
params.filterByColor=True
params.blobColor=0 #选择较暗斑点
params.blobColor=255 #选择较亮斑点
# Create a detector with the parameters
ver = (cv2.__version__).split('.')
if int(ver[0]) < 3 :
detector = cv2.SimpleBlobDetector(params)
else :
detector = cv2.SimpleBlobDetector_create(params)
# Detect blobs.
keypoints = detector.detect(im)
# Draw detected blobs as red circles.
# cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS ensures
# the size of the circle corresponds to the size of blob
im_with_keypoints = cv2.drawKeypoints(im, keypoints, np.array([]), (0,0,255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# Show blobs
cv2.imshow("Keypoints", im_with_keypoints)
cv2.waitKey(0)图片
3.Blob参数设置(原理简介)
在OpenCV中实现的叫做SimpleBlobDetector,它基于以下描述的相当简单的算法,并且进一步由参数控制,具有以下步骤。
thresholdStep = 10 #二值化的阈值步长
minThreshold = 50 #二值化的起始阈值
maxThreshold = 200 #二值化的终止阈值
#重复的最小次数,只有属于灰度图像斑点的那些二值图像斑点数量大于该值时,该灰度图像斑点才被认为是特征点
minRepeatability =2
#最小的斑点距离,不同二值图像的斑点间距离小于该值时,被认为是同一个位置的斑点,否则是不同位置上的斑点
minDistBetweenBlobs = 10
filterByColor = True #斑点颜色的限制变量
blobColor = 0 #表示只提取黑色斑点;如果该变量为255,表示只提取白色斑点
filterByArea = True #斑点面积的限制变量
minArea = 25 #斑点的最小面积
maxArea = 5000 #斑点的最大面积
filterByCircularity = True #斑点圆度的限制变量,默认是不限制
minCircularity =0.8 #斑点的最小圆度
filterByInertia = True #斑点惯性率的限制变量
minInertiaRatio =0.1 #斑点的最小惯性率
filterByConvexity = True #斑点凸度的限制变量
minConvexity =0.95 #斑点的最小凸度阈值:通过使用以minThreshold开始的阈值对源图像进行阈值处理,将源图像转换为多个二进制图像。这些阈值以thresholdStep递增,直到maxThreshold。因此,第一个阈值为minThreshold,第二个阈值为minThreshold + thresholdStep,第三个阈值为minThreshold + 2 x thresholdStep,依此类推;
分组:在每个二进制图像中,连接的白色像素被分组在一起。我们称这些二进制blob;
合并:计算二进制图像中二进制斑点的中心,并合并比minDistBetweenBlob更近的斑点;
中心和半径计算:计算并返回新合并的Blob的中心和半径。
并且可以进一步设置SimpleBlobDetector的参数来过滤所需的Blob类型。
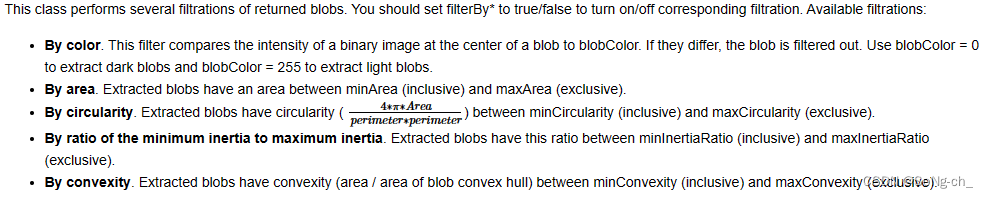
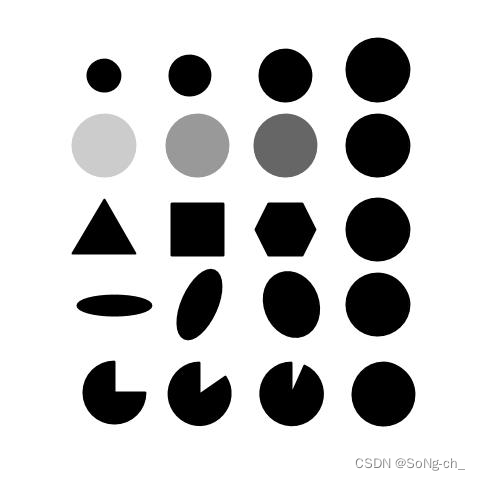
按颜色:首先需要设置filterByColor =True。设置blobColor = 0 可选择较暗的blob,blobColor = 255 可以选择较浅的blob。
按面积:可以通过设置参数filterByArea = 1以及minArea和maxArea的适当值来基于大小过滤blob。例如。设置minArea = 100将滤除所有少于100个像素的斑点。
按圆度:这只是测量斑点距圆的距离。例如。正六边形的圆度比正方形高。要按圆度过滤,请设置filterByCircularity =1。然后为minCircularity和maxCircularity设置适当的值。圆度定义为(
)。圆的为圆度为1,正方形的圆度为PI/4,依此类推。
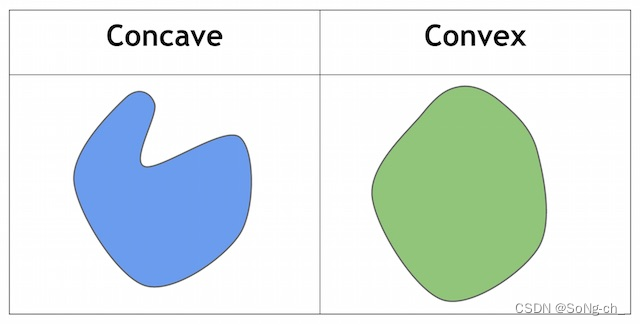
按凸性:凸度定义为(斑点的面积/凸包的面积)。现在,形状的“凸包”是最紧密的凸形,它完全包围了该形状,用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点。直观感受上,凸性越高则里面“奇怪的部分”越少。要按凸度过滤,需设置filterByConvexity = true,minConvexity、maxConvexity应该属于[0,1],而且maxConvexity> minConvexity。
按惯性比:这个词汇比较抽象。我们需要知道Ratio可以衡量形状的伸长程度。简单来说。对于圆,此值是1,对于椭圆,它在0到1之间,对于直线,它是0。按惯性比过滤,设置filterByInertia = true,并设置minInertiaRatio、maxInertiaRatio同样属于[0,1]并且maxConvexity> minConvexity。
按凸性(左低右高)按惯性比(左低右高)
















 149
149











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









