







 本文详述了使用arduino制作蓝牙遥控智能车的过程,包括蓝牙通信、直流电机控制、超声波测距和舵机模块的实现。通过手机蓝牙串口助手与arduino板交互,实现小车的远程控制和避障功能。
本文详述了使用arduino制作蓝牙遥控智能车的过程,包括蓝牙通信、直流电机控制、超声波测距和舵机模块的实现。通过手机蓝牙串口助手与arduino板交互,实现小车的远程控制和避障功能。
一、实验目的:
以arduino实验板为基础,在蓝牙模块、超声波模块、直流电机等模块的组合下开发一款智能车;要求可以在手机端控制小车的前进后退左右转向;超声波模块配合舵机模块实现多方位测距,并将测量结果返回到手机客户端;
二、实验器材
1.arduino板
2. 6节七号电池以及两块电池盒;
3.L298N电机驱动模块;
4.超声波模块;
5.双舵机模块;
6.蓝牙模块;
7.小车底盘及轮子;
8.小车配合使用的直流电机两个;
9.船型开关一只;
三、开发过程;
1.首先实现蓝牙串口通信;
蓝牙模块:

Arduino 与蓝牙模块连接方法
VCC:接Arduino的5V。
GND:接Arduino的GND。
TXD:发送端,一般表示为自己的发送端,接Arduino的RX。
RXD:接收端,一般表示为自己的接收端,接Arduino的TX。

测试代码:void setup()
{
Serial.begin(9600);
}
void loop()
{
while(Serial.available())
{
char c=Serial.read();
if(c=='A')
{
Serial.println("HelloWorld!");
}
}
}
将代码编译并上传到板子里面;
手机端,在手机应用市场下载“蓝牙串口助手”,可以实现蓝牙收发数据;
手机端 打开串口助手,搜索设备,与蓝牙模块进行配对,配对成功后发送字符“A”,打开IDE的串口调试窗口,可以看见打印了“Hello World!”。
至此实现了蓝牙通信;
2.实现直流电机的控制
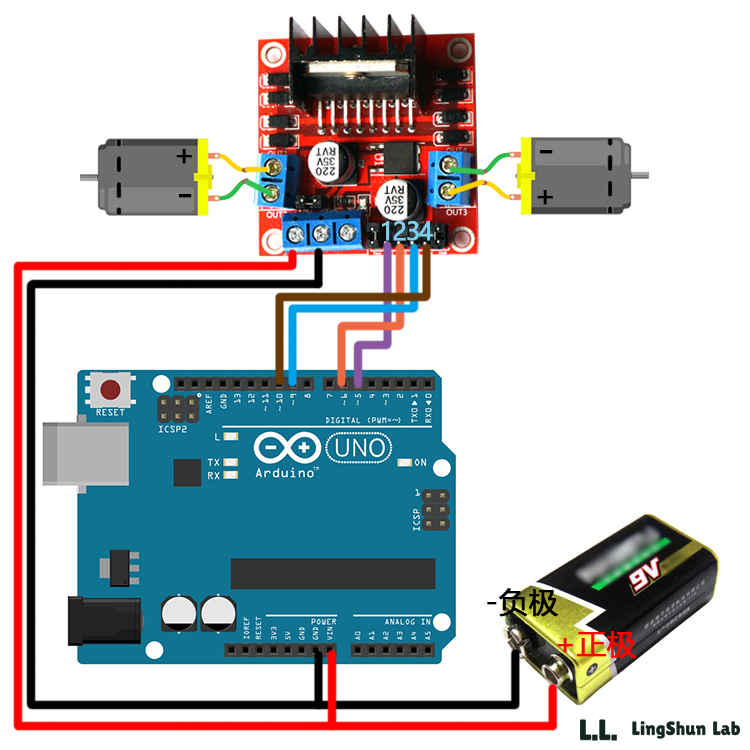
直流电机需要L298N驱动模块进行驱动,通过Arduino板的电平控制驱动板的电平输出从而控制直流电机的转速和转向;
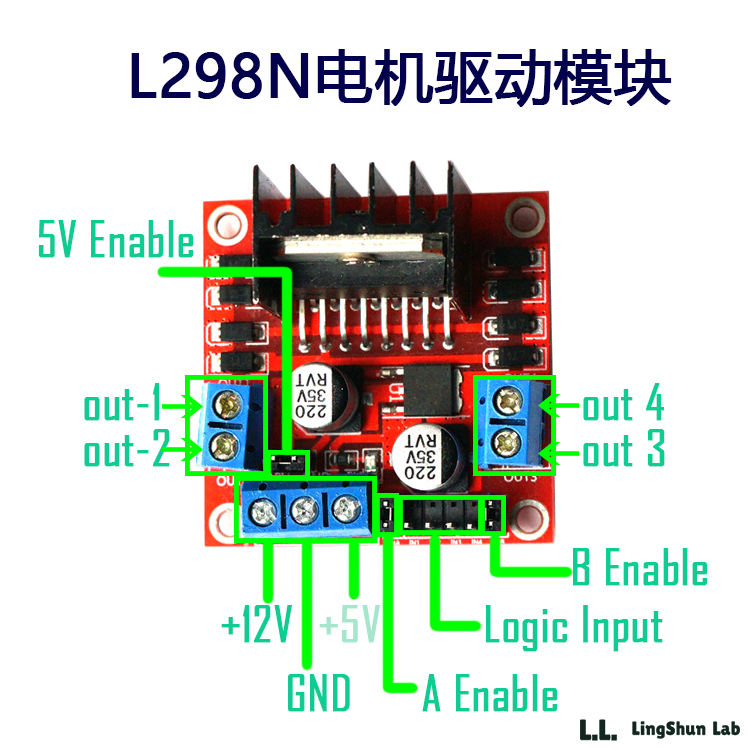
接线:
调试代码:(实现正传和反转功能)
int input1 = 5; // 定义uno的pin 5 向 input1 输出
int input2 = 6; // 定义uno的pin 6 向 input2 输出 <
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









