






高程点生成DEM流程
一、高程点展点
1、把高程点做成.xls格式的数据,在ArcMAP中找到文件→添加数据→添加XY数据
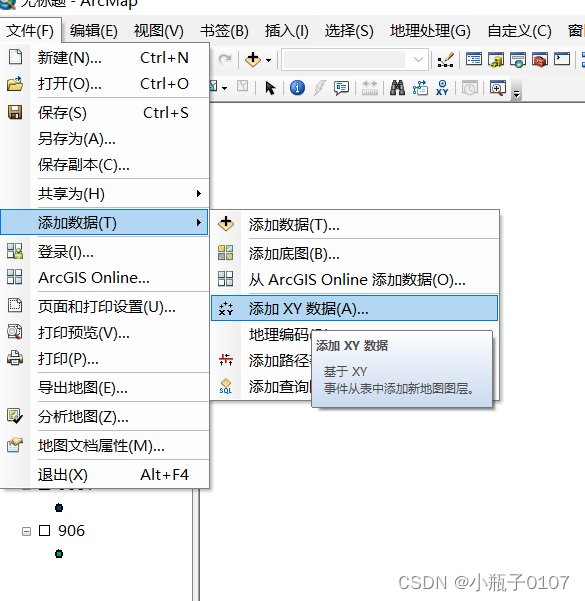
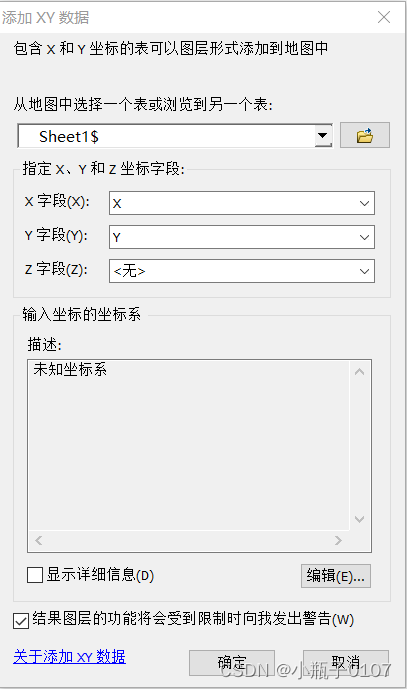
2、在弹出的窗口中添加.xls数据即可
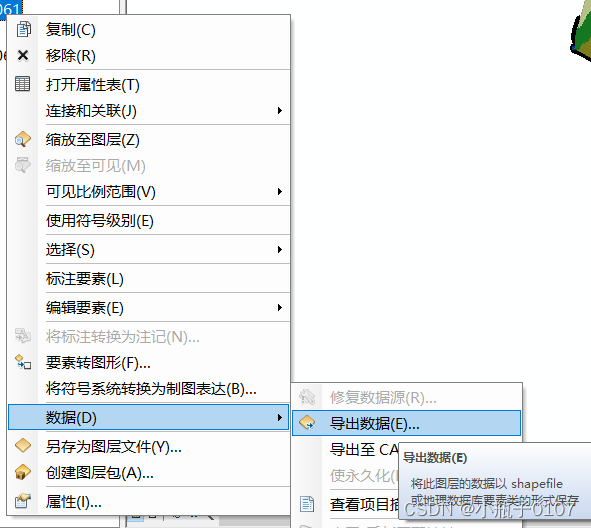
3、将展点得到的数据导出为.shp文件,方便后续创建tin文件
二、高程点创建TIN
1、在Arcmap中点击自定义→自定义模式→找到命令→找到3DAnalyst→搜索找到“从要素创建TIN”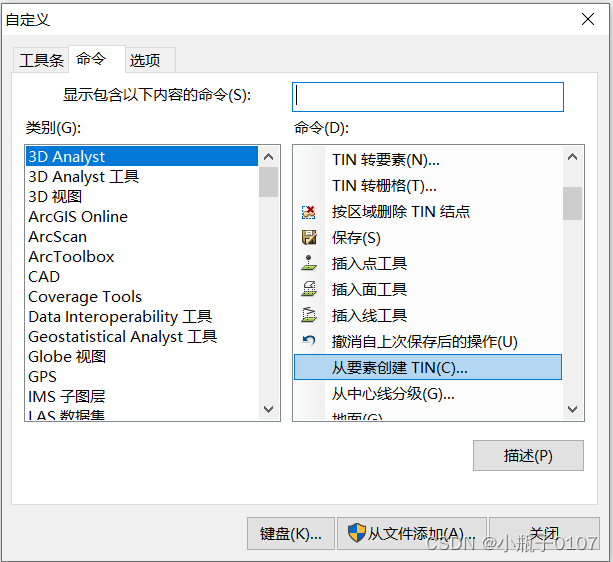
2、将图标拖到工具栏上→再点击图标→弹出窗口→勾选需要创建的数据→选择保存路径→确定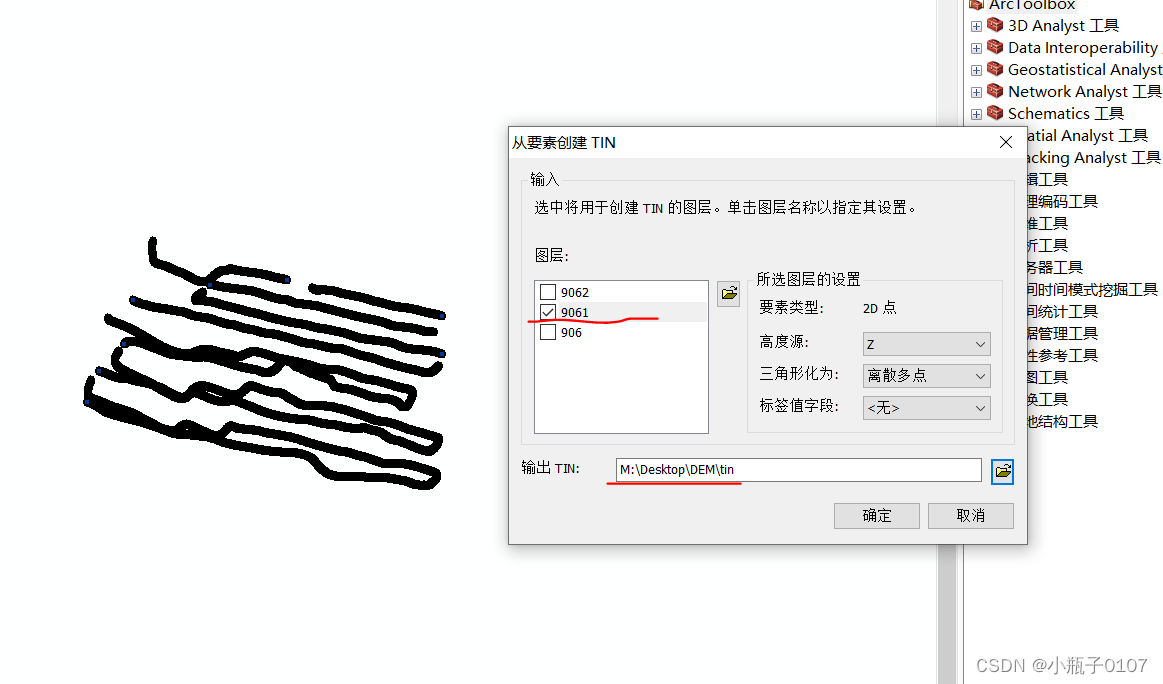
3、创建出的tin如下图所示: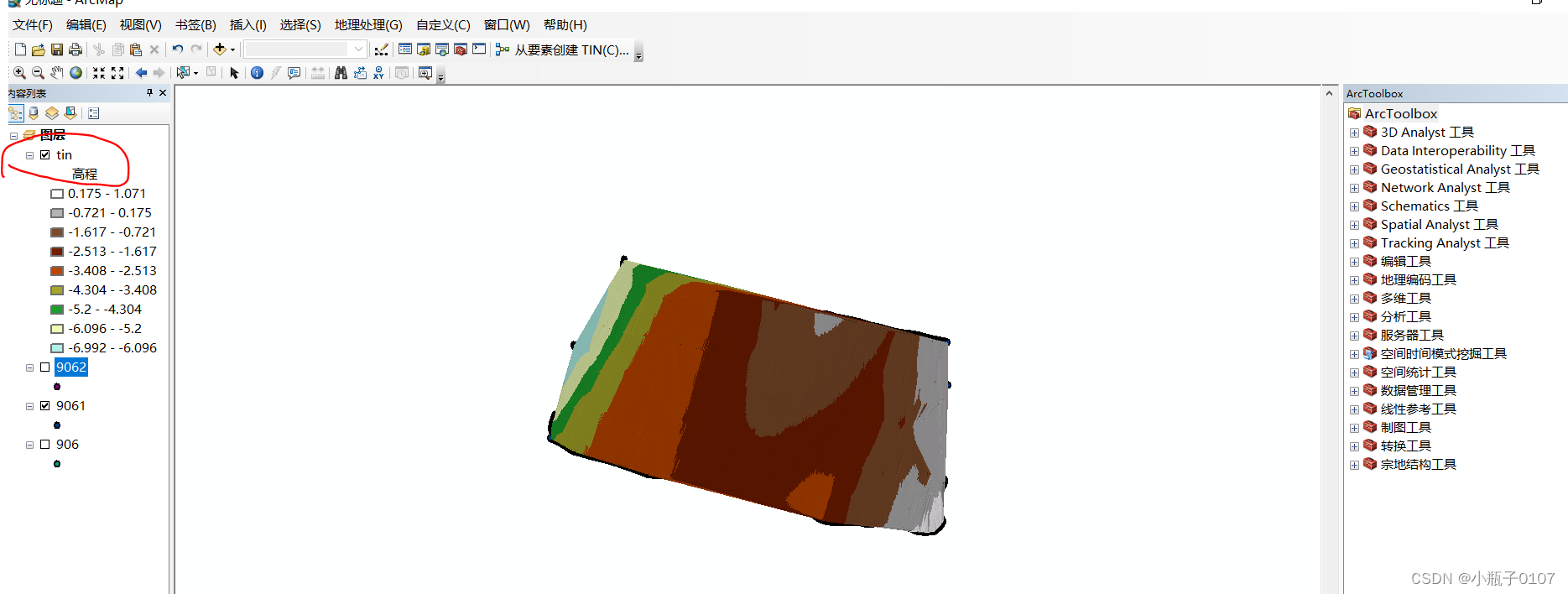
4、3DAnalyst(三维分析工具)---转换---TIN转栅格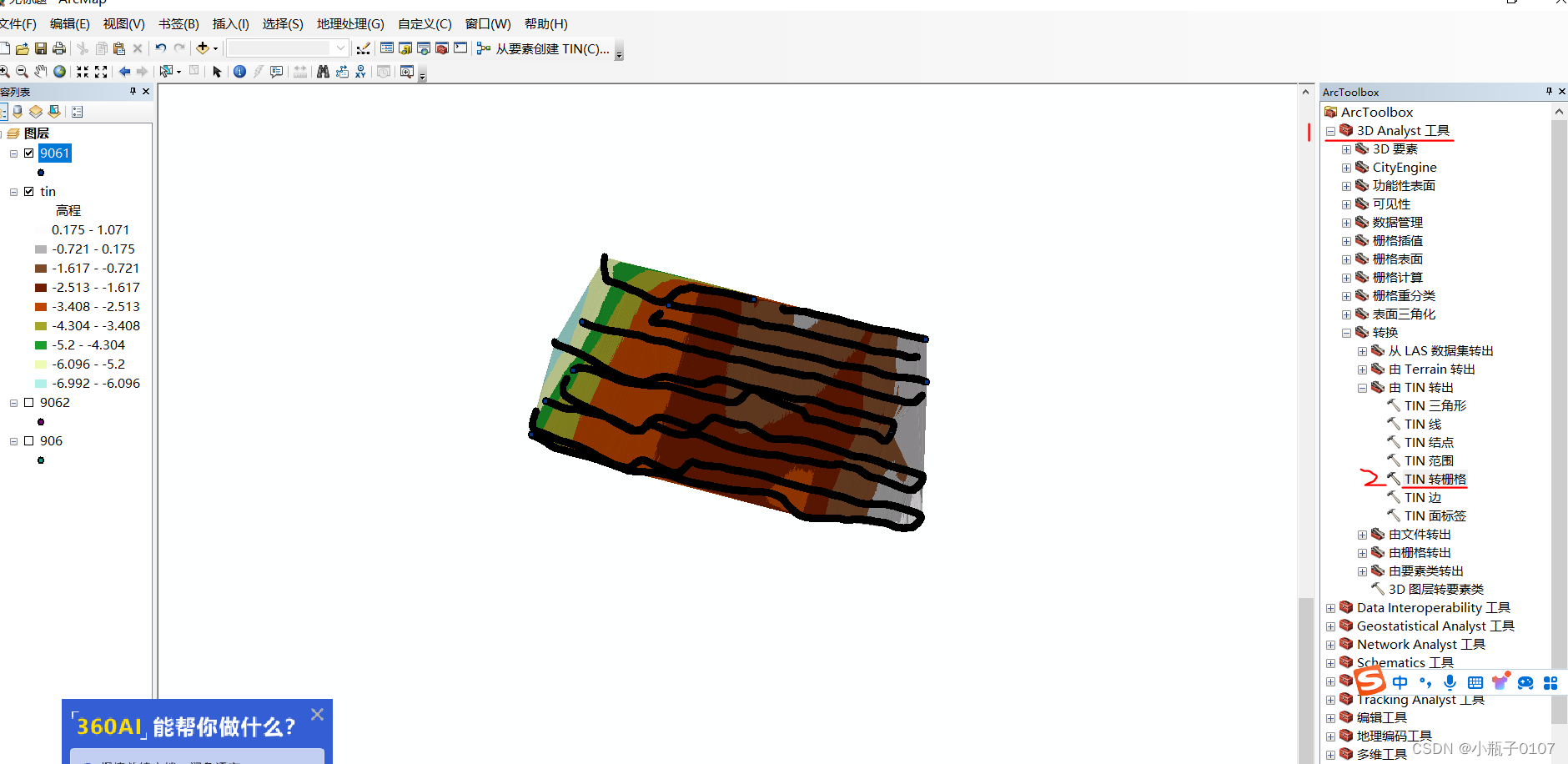
5、得到DEM数据如下图所示: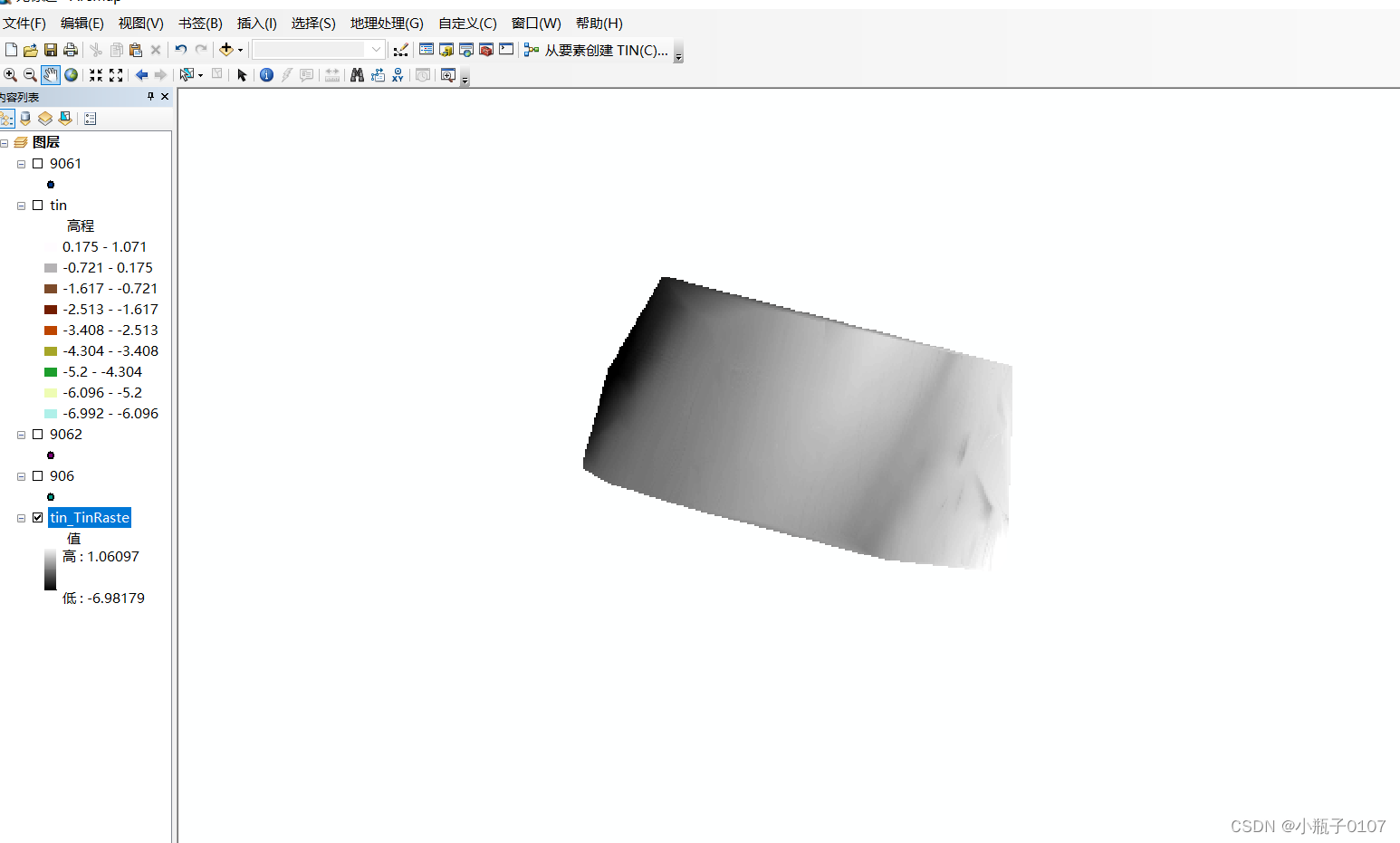
6、导出DEM数据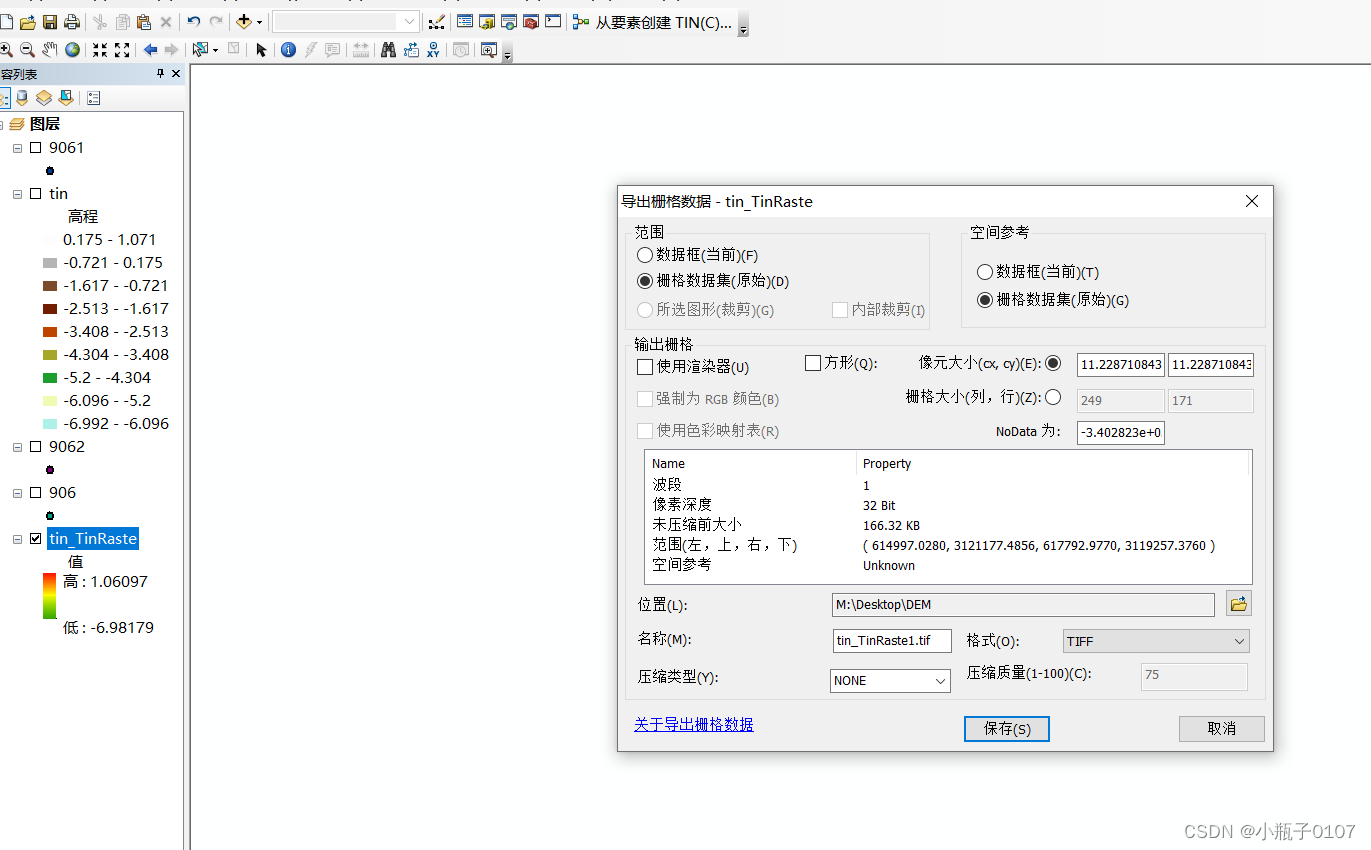
- DEM三维显示
1、打开ArcScene软件,然后加载DEM数据,发现显示的是二维平面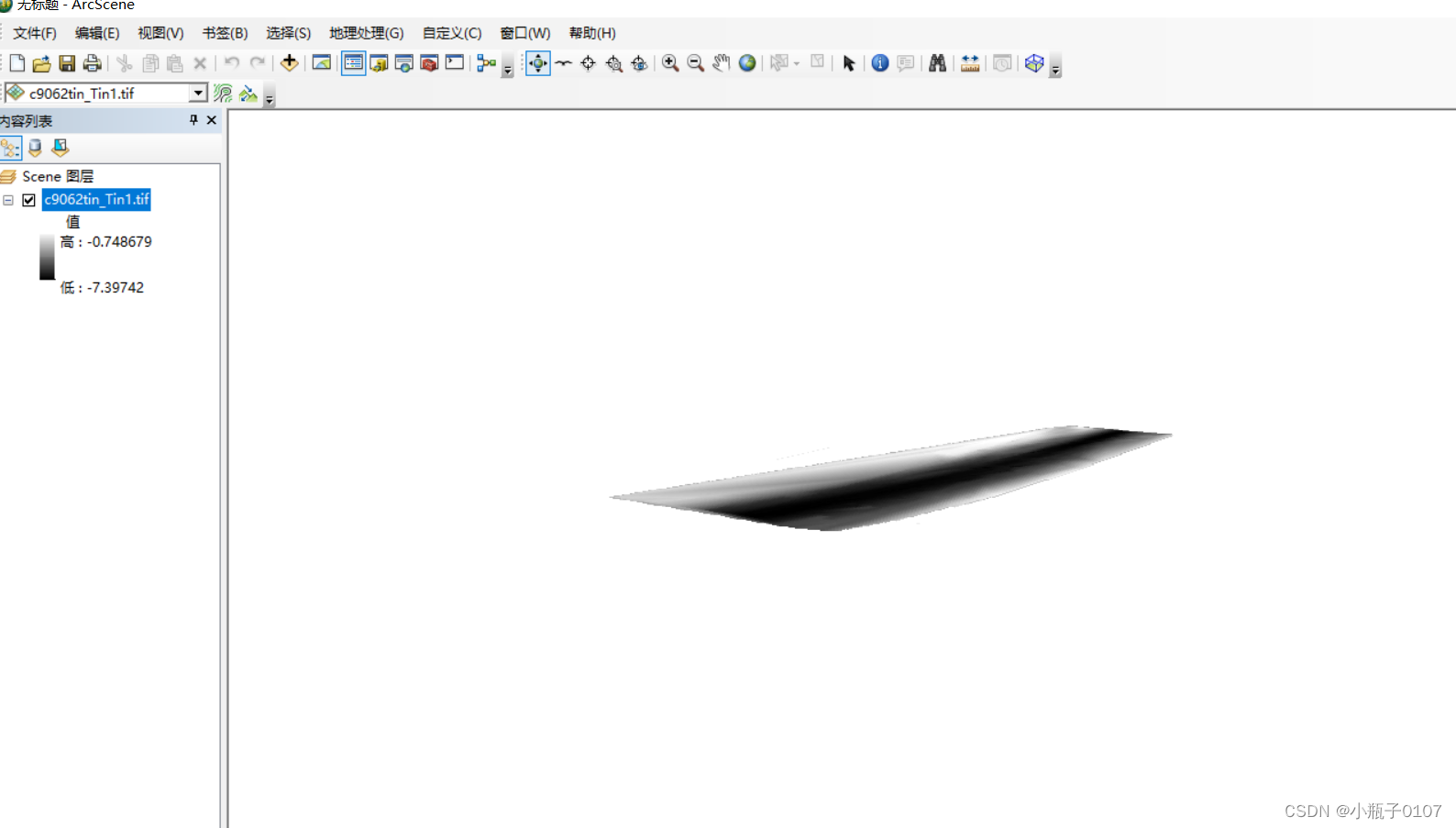 2、右击DEM图层,点击属性,弹出属性框,选择“基本高度”,在“从表面获取的高程”中,选择“在自定义表面上浮动”,然后应用和确定
2、右击DEM图层,点击属性,弹出属性框,选择“基本高度”,在“从表面获取的高程”中,选择“在自定义表面上浮动”,然后应用和确定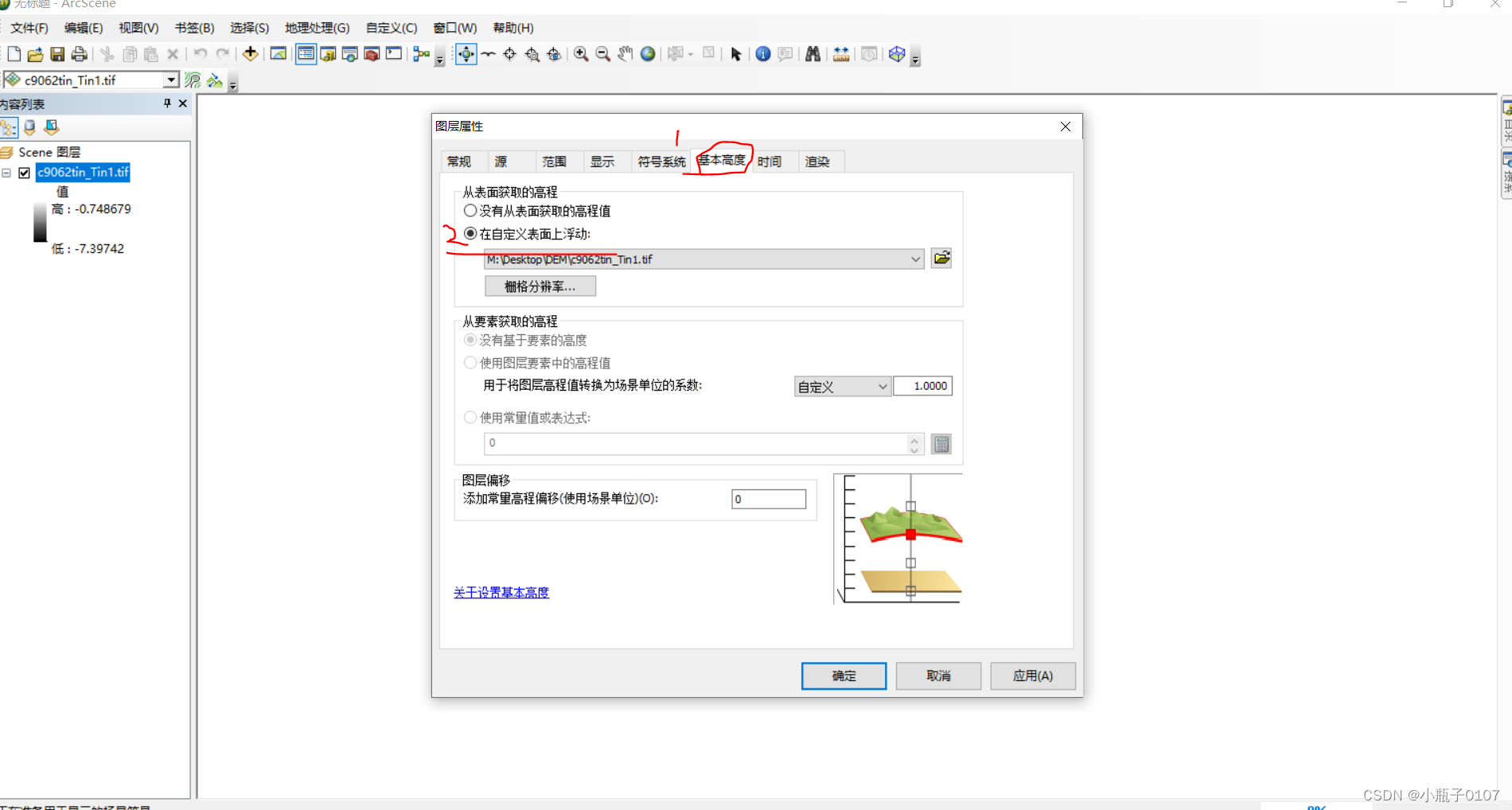 3、右击“Scene图层”,选择“场景属性”,弹出场景属性对话框,将垂直夸大的值基于范围进行计算,点击确定
3、右击“Scene图层”,选择“场景属性”,弹出场景属性对话框,将垂直夸大的值基于范围进行计算,点击确定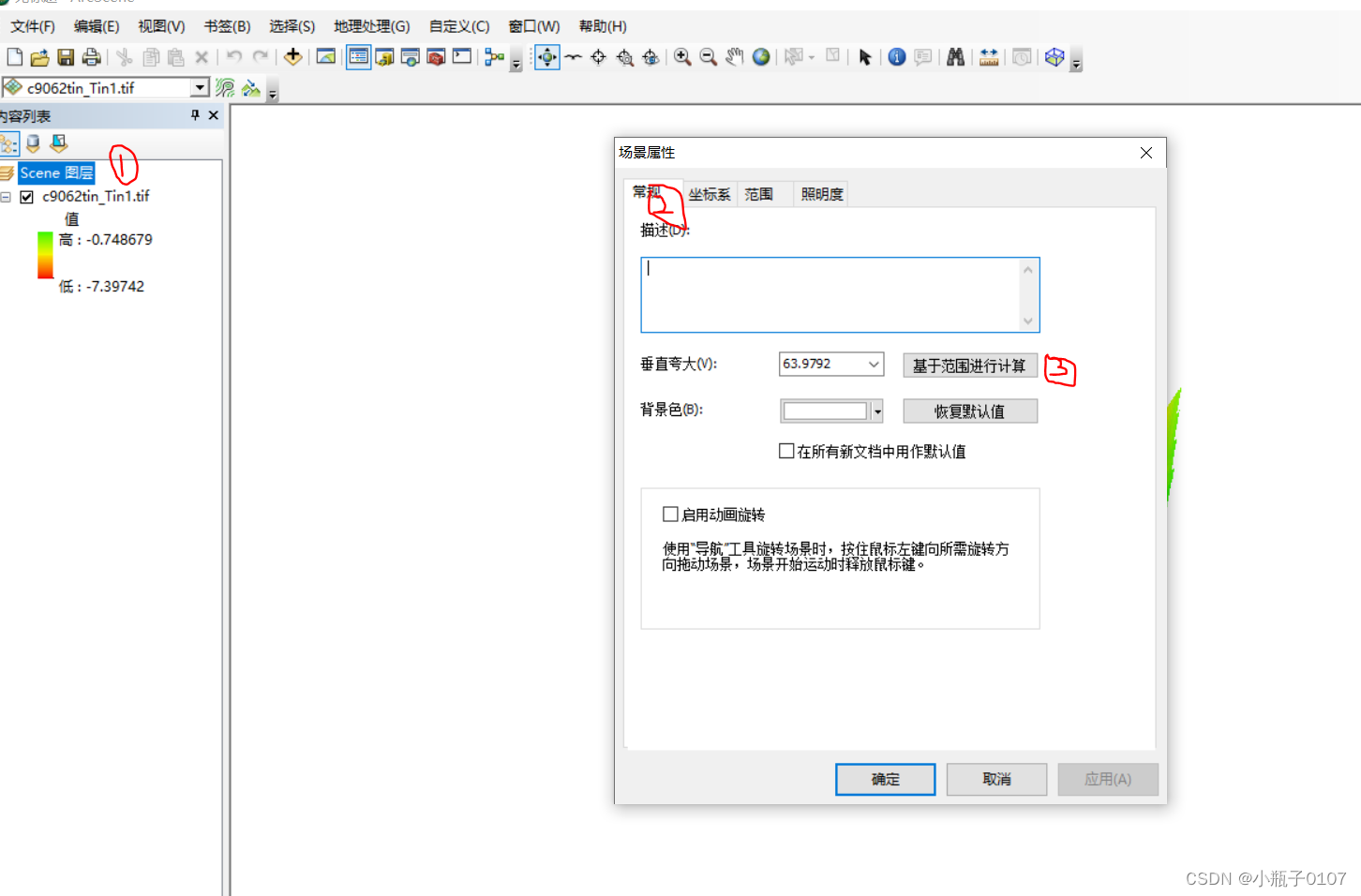 4、即可得到有立体感的DEM数据
4、即可得到有立体感的DEM数据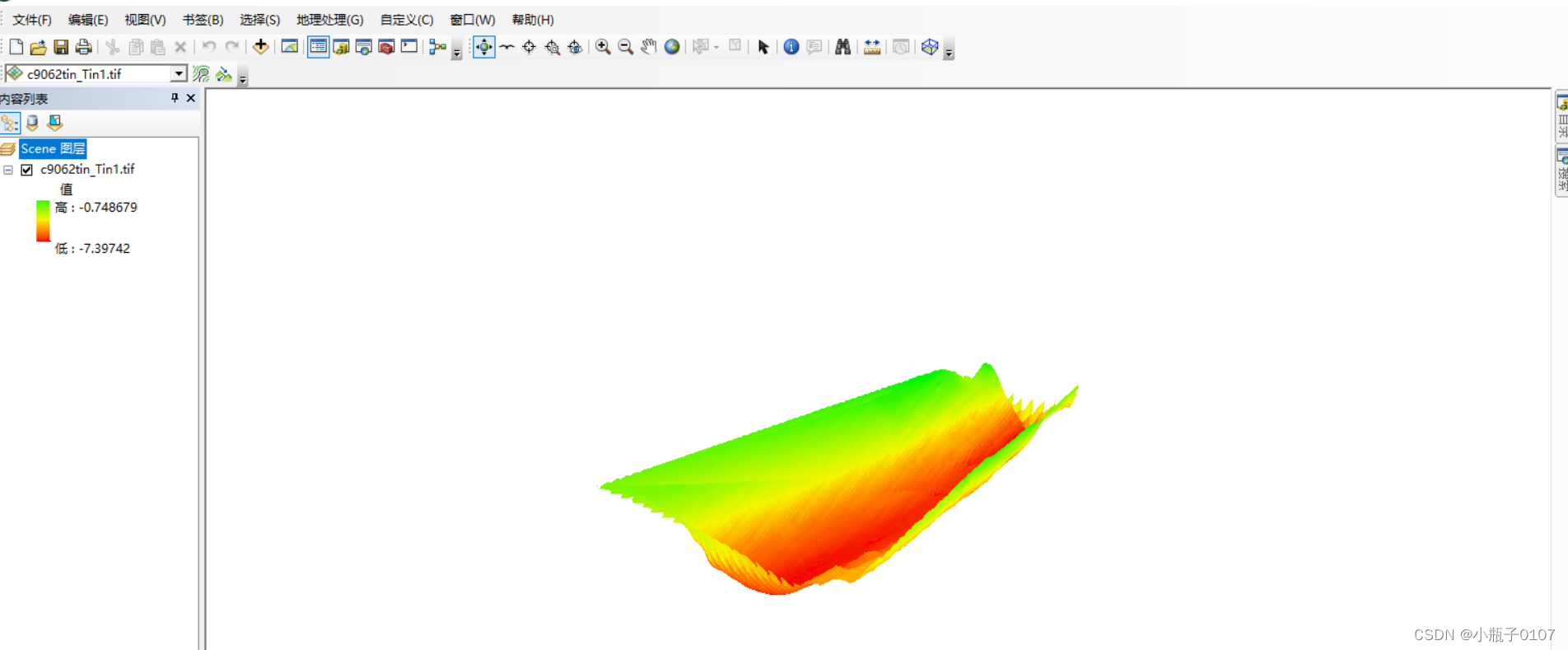















 3379
3379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









