







1、一维弹簧单元
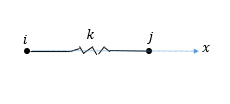
2个节点,每个节点一个自由度(
![]()
),局部坐标系的刚度矩阵和整体坐标系的刚度矩阵一致。假设弹簧单元的刚度为
![]()
,则一次单元在局部坐标系和整体坐标系的刚度矩阵(2×2阶)为
![]()
![]()
![]()
为局部坐标系中的单元力列阵
![]()
为整体坐标系中的单元节点位移列阵
class Spring1D11(StructElement):def __init__(self, nodes, ke, dens=2):StructElement.__init__(self, nodes)self.k = keself.dens = densdef init_unknowns(self):for nd in self.nodes:nd.init_unknowns("Ux")self._ndof = 1def init_keys(self):self.set_eIk(["N"])def calc_T(self):self._T = np.array([[1, 0],[0, 1]])def sx(self):passdef calc_ke(self):self._ke = _calc_ke_for_spring(ke=self.k)def _calc_ke_for_spring(ke=1.0):return np.array([[ke, -ke],[-ke, ke]])
2、二维弹簧单元
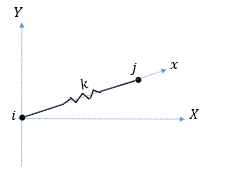
2个节点,每个节点两个自由度(
![]()
、
![]()
),假设弹簧单元的刚度为
![]()
,局部坐标系的刚度矩阵(2×2阶)为
![]()
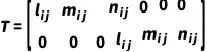
整体坐标系中的刚度矩阵(4×4阶)为
![]()
![]()
![]()
![]()
![]()
![]()
分别为整体坐标系中单元
![]()
的坐标
![]()
![]()
为局部坐标系中的单元力列阵
![]()
为整体坐标系中的单元节点位移列阵
3、三维弹簧单元
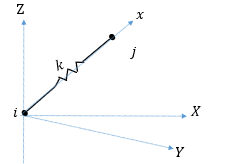
2个节点,每个节点三个自由度(
![]()
、
![]()
、
![]()
),假设弹簧单元的刚度为
![]()
,局部坐标系的刚度矩阵(2×2阶)为
![]()
整体坐标系中的刚度矩阵(6×6阶)为
![]()
![]()
![]()
![]()
![]()
![]()
分别为整体坐标系中单元
![]()
的坐标
![]()
![]()
为局部坐标系中的单元力列阵
![]()
为整体坐标系中的单元节点位移列阵
4、一维杆单元
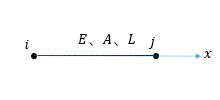
与弹簧单元类似,用
![]()
代替
![]()
5、二维杆单元
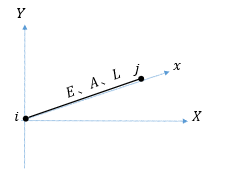
与弹簧单元类似,用
![]()
代替
![]()
6、三维杆单元
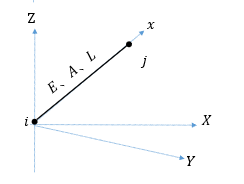
与弹簧单元类似,用
![]()
代替
![]()
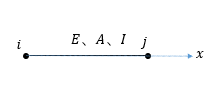
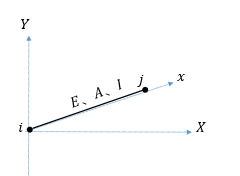
7、一维梁单元
2个节点,每个节点6个自由度(
![]()
、
![]()
、
![]()
),假设梁单元的弹性模量为
![]()
,界面面积为
![]()
,界面惯性矩为
![]()
,长度为
![]()
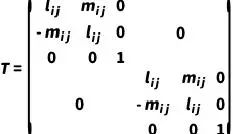
,局部坐标系的刚度矩阵(6×6阶)为
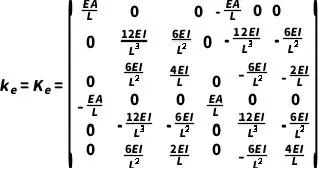
整体坐标系中的刚度矩阵(4×4阶)为
![]()
![]()
![]()
![]()
![]()
分别为整体坐标系中单元
![]()
的坐标
![]()
![]()
为局部坐标系中的单元力列阵
![]()
为整体坐标系中的单元节点位移列
8、二维梁单元
9、三维梁单元

















 1082
1082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









