




 本文概述了在Ubuntu20.04环境下编译ORBSLAM2时遇到的问题,包括eigen库连接、opencv版本调整、C++编译器设置、错误修复(如usleep未声明、DBoW2库问题和静态assertion)、以及使用C++11编译器和解决chrono错误的过程。
本文概述了在Ubuntu20.04环境下编译ORBSLAM2时遇到的问题,包括eigen库连接、opencv版本调整、C++编译器设置、错误修复(如usleep未声明、DBoW2库问题和静态assertion)、以及使用C++11编译器和解决chrono错误的过程。
1. 连接 eigen库
sudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen
2. opencvx
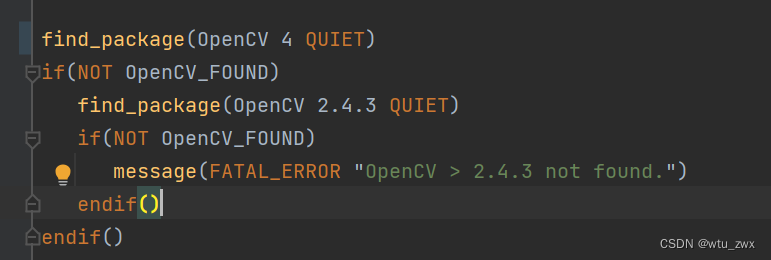
修改 CMakeList.txt 中的 find_package open cv版本
修改 include/orbExtracter.h 文件为:
//#include <opencv2/opencv.hpp> #include<opencv2/imgproc/imgproc_c.h> #include <opencv2/highgui/highgui_c.h>
CV_LOAD_IMAGE_UNCHANGED 改为 cv::IMREAD_UNCHANGED
CV_LOAD_IMAGE_GRAYSCALE 改为 cv::IMREAD_GRAYSCALE
CV_LOAD_IMAGE_COLOR 改为 cv::IMREAD_COLOR
CV_LOAD_IMAGE_ANYDEPTH 改为 cv::IMREAD_ANYDEPTH
3. 设置 gcc 编译版本
## Check C++11 or C++0x support
#include(CheckCXXCompilerFlag)
#CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
#CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
#if(COMPILER_SUPPORTS_CXX11)
# set(CMAKE_CXX_FLAG 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1106
1106

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









