






大厂扫地机器人 源代码,freertos实时操作系统,企业级应用源码,适合需要学习嵌入式以及实时操作系统的工程师,32端代码能实现延边避障防跌 落充电等功能。
硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。
软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。
提供一个固件以及一个升级版固件
代码注释清晰、代码规范好、每个函数必有输入输出范围以及参数解释,便于阅读理解,很适合入门以及需要提升的工程师学习。
ID:384670617713749
爱吃地瓜丸子的黄油欧阳



大厂扫地机器人 源代码,freertos实时操作系统,企业级应用源码,适合需要学习嵌入式以及实时操作系统的工程师,32端代码能实现延边避障防跌 落充电等功能。
近年来,随着人工智能和机器人技术的发展,扫地机器人作为一种智能家居产品,受到了越来越多人的关注和喜爱。作为扫地机器人的核心部分,其软件开发涉及到嵌入式以及实时操作系统等技术,对于工程师来说,学习和掌握相关技术是非常重要的。
在这篇文章中,我们将重点介绍一款大厂扫地机器人的源代码,该代码基于freertos实时操作系统,并且适用于企业级应用。该代码不仅适合初学者入门学习,也能帮助工程师提升技术水平。
首先,让我们来了解一下大厂扫地机器人的功能。该机器人的源代码包含了许多关键的硬件驱动,其中包括陀螺仪姿态传感器bmi160和电源管理bq24733等。这些硬件驱动为机器人的运动和功耗管理提供了重要支持。
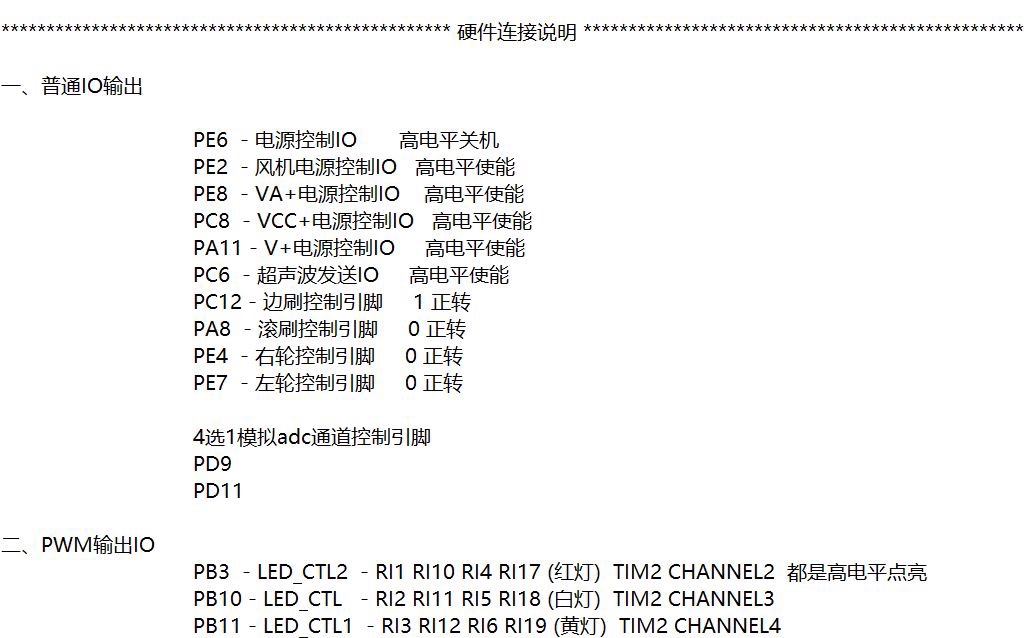
在软件驱动方面,大厂扫地机器人的源代码涵盖了多种技术,如IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断等。这些驱动技术在机器人的各个功能模块中发挥着重要作用。此外,通信协议、IAP升级、PID、freertos操作系统等技术也得到了广泛应用,提升了机器人的性能和稳定性。
重要的是,大厂扫地机器人的源代码提供了一个固件以及一个升级版固件。这意味着工程师可以根据自己的需求选择合适的固件,以便进行开发和改进。同时,代码的注释清晰、规范良好,每个函数都有明确的输入输出范围和参数解释,便于阅读和理解。这对于初学者来说,是非常友好的学习材料。
总结起来,大厂扫地机器人的源代码是一份优秀的技术资源,它不仅包含了基于freertos实时操作系统的企业级应用源码,还涵盖了多种硬件和软件驱动技术。无论是初学者还是工程师,都可以通过学习和使用这份源代码来提升自己的嵌入式和实时操作系统技术。我们相信,这份源代码的发布将对广大的技术社区产生积极的影响,并且为扫地机器人领域的发展做出贡献。
注:本文所述的源代码仅供学习和技术交流使用,禁止用于商业目的。同时,我们建议读者在使用源代码前仔细阅读相关文档,并确保在操作过程中遵循相关法律法规。
相关的代码,程序地址如下:http://wekup.cn/670617713749.html
















 369
369

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









