









智慧中控
- 前言
- 一、搭建开发环境
- 1.需要做什么?
- 1.1 刷机和启动OrangePi Zero2(全志H616芯片)
- 1.2 在PC上安装虚拟机VM(安装VirtualBox或VMware:这是常用的虚拟机软件工具)
- 1.3 在虚拟机VM(VirtualBox或VMware)上安装Linux系统 (Ubuntu、Debian)
- 1.4 安装Python、wiringOP和所需的库。
- ——————————————————
- 不用操作1.2、1.3、1.4,直接从1.1接上1.5。
- 正常来说,在PC机上用虚拟机装linux环境开发是按照上面的顺序。但是MobaXterm软件可以通过SSH远程连接上嵌入式设备,直接就可以通过MobaXterm软件操作到香橙派的Linux 系统,直接在MobaXterm上进行香橙派的开发。
- ——————————————————
- 1.5 安装MobaXterm 软件,在PC机上远程连接到OrangePi Zero2(linux系统) 进行代码开发
- 1.6 安装wiringPi库——官方的外设SDK
- 2.怎么做?
- 二、基于OrangePi Zero2的智能家居
- 1. 需求及项目准备
- 2. 开发过程
- 3. POSIX消息队列
- 4.先不交叉编译版本
- 5.开启远程监控
前言
一、搭建开发环境
我们需要在window系统的PC机上配置一个开发环境,以便与OrangePi和相关硬件组件进行交互。下面是详细步骤:
1.需要做什么?
OrangePi Zero2(全志H616芯片)开发板在使用前,需要先刷机
OrangePi Zero2(全志H616芯片) 系统启动
在PC上安装虚拟机VM(安装VirtualBox或VMware:这是常用的虚拟机软件工具)
在虚拟机VM(VirtualBox或VMware)上安装Linux系统 (Ubuntu、Debian)
安装Python、wiringOP和所需的库。
设置Socket编程进行远程控制。
配置阿里云SDK进行人脸识别。
使用Python脚本测试硬件连接。
makefile不知道要不要?
1.1 刷机和启动OrangePi Zero2(全志H616芯片)
就像买了电脑,出厂带有windows操作系统,才算是真正的电脑,
所以开发板需要烧写对应的系统固件,才能正常发挥作用。
1.2 在PC上安装虚拟机VM(安装VirtualBox或VMware:这是常用的虚拟机软件工具)
1.3 在虚拟机VM(VirtualBox或VMware)上安装Linux系统 (Ubuntu、Debian)
在Windows系统的PC机上实现基于OrangePi Zero2(全志H616芯片)的项目,OrangePi顾名思义就叫香橙派,为了顺口,下面就都叫做实现基于香橙派(全志H616芯片)项目了。
首先因为香橙派(全志H616芯片)运行的是Linux系统 (Debian, Ubuntu等,Debian是Ubuntu的爸巴),
所以我们要在PC机的window上安装虚拟机(相当于在电脑里虚拟出另外一台电脑,可以装其它的系统),然后在虚拟机里安装linux系统。
这样我们就可以在自己PC机的window环境中,并在这个环境中的虚拟机的Linux环境中开发Linux的项目了。
开发完项目,写完的代码,我们可以通过①串口烧录或者②SSH登录开发板的方式,将代码传给香橙派。

1.4 安装Python、wiringOP和所需的库。
开发香橙派(全志H616芯片)项目的过程中,我们在写智能中控的主代码执行逻辑时,我们的主代码需要调用到一些接口,来实现一些功能。所以我们会调用到一些库和函数,比如:
wiringOP库——这是最基本的外设库,提供了很多操作香橙派外设的功能接口。就比如香橙派的gpio口的控制,我们安装下载这个库,这样实现一些关于香橙派的gpio口还有其它外设的功能就不用自己写了。
在PC机(Window环境)的虚拟机(Linux环境)上安装wiringOP库,因为在虚拟机(Linux环境)开发过程中要调用到这个库。然后也要下载或传到香橙派的linux系统中,因为等我们在虚拟机中开发完并把代码传到香橙派时,香橙派用的也是这份代码,所以香橙派在执行主代码时候也需要调用到这个库。
安装Python——在PC机(Window环境)的虚拟机(Linux环境)上安装Python,同样也要在香橙派的linux系统中安装Python(在香橙派 3.0.6版本的镜像里已经默认自带了python3.10的版本,不需要安装,只需要后续安装下python3 dev即可)。
因为我们在linux开发过程中使用的是C语言,但是我们需要调用到阿里巴巴的图像识别和人脸识别的接口(这个接口支持Python和java语言,官网会提供Python和java语言的demo代码给我们去调用图像识别和人脸识别的接口)。
这里我们使用阿里巴巴提供的python语言demo代码去调用图像识别和人脸识别的接口,但是我们开发又是使用c语言,所以我们需要使用c语言代码去调用Python语言代码,让Python语言代码再去调用人脸识别的接口。所以我们需要安装Python开发环境。
——————————————————
不用操作1.2、1.3、1.4,直接从1.1接上1.5。
正常来说,在PC机上用虚拟机装linux环境开发是按照上面的顺序。但是MobaXterm软件可以通过SSH远程连接上嵌入式设备,直接就可以通过MobaXterm软件操作到香橙派的Linux 系统,直接在MobaXterm上进行香橙派的开发。
——————————————————
1.5 安装MobaXterm 软件,在PC机上远程连接到OrangePi Zero2(linux系统) 进行代码开发
直接下载安装就好了。
使用 MobaXterm 软件,就不需要在电脑上安装虚拟机来运行 Linux 环境了。使用MobaXterm软件通过SSH远程连接上嵌入式设备,就可以直接通过MobaXterm软件操作到香橙派的Linux 系统,直接在MobaXterm上进行香橙派的开发。
这句话有待考证,后面学完再回来看:
但是写完代码,可能香橙派(全志H616芯片)的CPU运算比较慢,编译代码会很忙,特别是项目特别大的时候。所以我们需要在用电脑的CPU运算,在电脑上进行编译项目代码(这里又涉及到交叉编译了,使用交叉编译工具链编译适用于嵌入式设备的代码,)。编译完后将生成的可执行文件传到香橙派(全志H616芯片)上运行。(除了香橙派,其它的嵌入式设备交叉编译也一样)
所以在你的智能家居项目中,如果 OrangePi Zero2 已经搭载了 Linux 系统,MobaXterm 就可以很方便地进行开发、文件传输和远程管理。如果需要本地编译代码,再传到 OrangePi 上,你可以考虑在 PC 上使用 Linux 或虚拟机做交叉编译。
用MobaXterm来开发基于OrangePi Zero2的智能家居项目,有以下好处:
-
远程连接:MobaXterm支持SSH、SFTP等协议,可以让你通过网络远程登录OrangePi设备,进行命令行操作或文件传输,而不必每次都直接接触硬件。
-
图形化文件管理:使用SFTP功能,你可以通过图形化界面在你的PC与OrangePi之间传输文件,省去使用命令行复制文件的繁琐步骤。
-
终端管理:它提供一个直观的终端窗口来输入Linux命令,如同在Linux机器本地操作一样,方便调试和配置你的OrangePi项目。
-
多任务支持:MobaXterm支持多标签页,可以同时管理多个连接或任务,提升你的工作效率,特别适合你同时处理多个设备或调试多个服务时。
-
X11转发:MobaXterm可以通过SSH连接支持X11转发功能,也就是可以在本地Windows电脑上显示OrangePi上运行的图形界面程序。

1.5.1其它企业开发嵌入式设备时,会使用到的方式
在企业中,开发嵌入式设备时,一般会使用以下方式:
-
远程开发:使用工具如 MobaXterm(这里使用的就是这个)、PuTTY 或 SSH,远程登录到嵌入式设备,直接在设备上进行开发和调试,特别是当设备已经安装了 Linux 系统时,这种方式比较常见。
-
交叉编译:在开发电脑上(通常是 Linux 环境)进行代码编写,然后使用交叉编译工具链编译适用于嵌入式设备的代码,最后将生成的可执行文件传到设备上运行。
-
IDE 与调试工具:有些开发企业会使用专门的 IDE(集成开发环境)如 Eclipse、VS Code、或 JetBrains CLion 来进行代码编写和调试。这些 IDE 可以通过插件或扩展来支持嵌入式开发,还可以集成调试工具如 GDB。
-
硬件调试器:对于较底层的开发(如驱动程序开发),有些企业会使用硬件调试器(如 JTAG)直接连接到设备,以进行更加深入的调试和监控。
1.6 安装wiringPi库——官方的外设SDK
wiringOP库——这是最基本的外设库,提供了很多操作香橙派外设的功能接口。就比如香橙派的gpio口的控制,我们安装下载这个库,这样实现一些关于香橙派的gpio口还有其它外设的功能就不用自己写了。
2.怎么做?
2.1 硬件:Orangepi Zero2 全志H616开发板

2.2 配套操作系统支持说明—Orangepi Zero2 全志H616开发板
建议使用内核版本为linux4.9的镜像,5.13版本的还存在一些bug,它们的程序员没有写好。
(这里改了,后续用的镜像内核版本是linux5.16版,因为它自带了python3.10,我们后面会用到python,使用直接安装这个linux5.16版的操作系统,我们就不用安装python了。镜像文件:Orangepizero2_3.0.6_ubuntu_jammy_desktop_xfce_linux5.16.17.img)

2.3 刷机和系统启动
就像买了电脑,出厂带有windows操作系统,才算是真正的电脑,
所以开发板需要烧写对应的系统固件,才能正常发挥作用。
2.31 工具
Orangepi Zero2 全志H616开发板
PC机
TF卡(也称 MicroSD卡)及读卡器
操作系统镜像
SDFormatter (TF卡的格式化工具)
Win32Diskimager (刷机工具)
USB转TTL(用于系统烧写后的串口登录开发板)
2.32 工具安装
SDFormatter傻瓜式安装,Win32Diskimager傻瓜式安装
2.33 刷机和系统启动
环境搭建版本:
课程使用的镜像是香橙派3.0.6版本(linux操作系统)
(备注:在香橙派 3.0.6版本的镜像里已经默认自带了python3.10的版本,不需要安装,只需要后续安装下python3 dev即可,所以后续统一采用Orangepizero2_3.0.6_ubuntu_jammy_desktop_xfce_linux5.16.17的系统镜像)
刷机过程:
①使用SDFormatter工具格式化 TF卡(也称 MicroSD卡)
- 把 TF卡(也称 MicroSD卡)插入TF读卡器中,
- 然后把TF读卡器通过USB口插入电脑,电脑读取到TF卡。
- 打开SDFormatter工具,选择TF卡那个盘格式化就好了。


②使用Win32Diskimager (刷机工具),把香橙派3.0.6版本的镜像文件(linux操作系统)刷写入TF卡
- 打开Win32Diskimager (刷机工具),
- 然后选择镜像文件:香橙派3.0.6版本,镜像文件以.img结尾(
Orangepizero2_3.0.6_ubuntu_jammy_desktop_xfce_linux5.16.17.img), - 选择设备:插在电脑上的TF卡的盘符,
- 然后点击写入,就会把这个香橙派3.0.6的镜像文件写入这个TF卡中。

③把TF卡插入香橙派中,这个时候TF卡里面是有linux操作系统的了。

④香橙派通过串口连接电脑,电脑通过MobaXterm软件观察香橙派的启动情况。
-
安装CH340驱动,香橙派使用USB转TTL模块通过串口连接电脑。电脑插上后在设备管理器/端口可以看到USB CH340
(因为USB转TTL模块芯片是CH340,所以电脑需要安装CH340驱动,这个驱动写好了协议转换,具体的知识,可以看串口的笔记)

-
接线:
a.USB转TTL模块的GND接到开发板的GND上
b.USB转TTL模块的RX接到开发板的TX上
c.USB转TTL模块的TX接到开发板的RX上

-
接着电脑打开MobaXterm软件,通过MobaXterm软件就可以观察到板子的启动情况了。
(使用MobaXterm免费好用,类似的工具还有Putty-相对太简陋,SecurityCRT老牌工具-需要付费或者破解)

⑤把香橙派插上电就可以(MobaXterm软件可能会显示报错什么的,按R重启一下软件)。香橙派上电正常启动后,MobaXterm软件显示输入用户和密码,代表刷机成功并且系统成功启动。
-
供电:

-
香橙派的LED灯测试说明:

-
香橙派上电正常启动后,MobaXterm软件显示输入用户和密码,代表刷机成功且系统成功启动:

2.34 修改登陆密码
默认密码是orangepi容易写错,为了方便,我改成密码为1

2.35 连接网络,查看ip地址
命令扫描周围的可以连接的WIFI热点 nmcli dev wifi
命令接入网络 nmcli dev wifi connect YXS1005 password yuanxueshe1005
查看IP地址ip addr show wlan0 (ifconfig也可以)

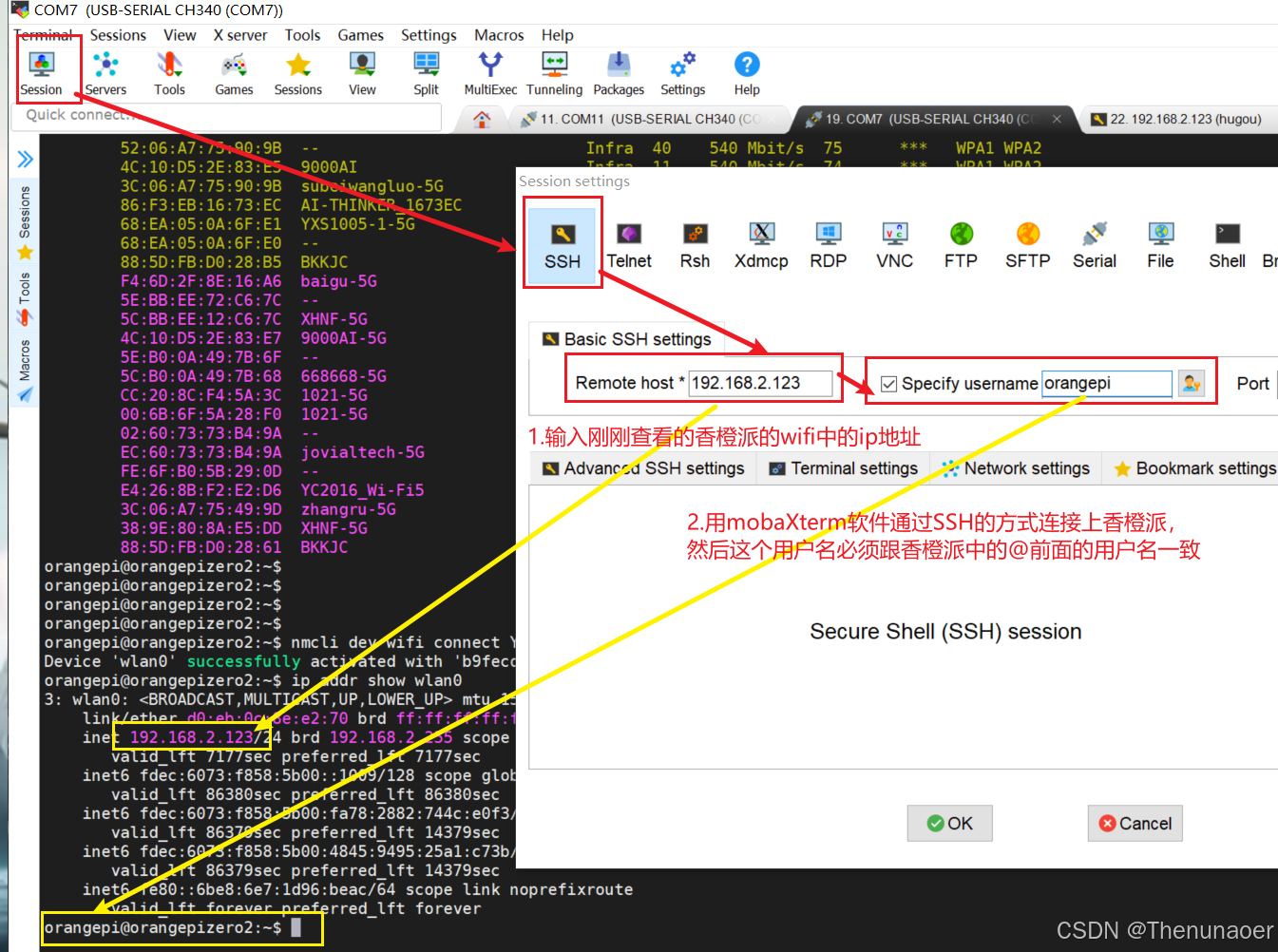
2.36 SSH登陆开发板
这是企业开发调试必用方式,比串口来说不用接线,前提是连接上网络并获得板子的IP地址,且系统做了SSH的服务器。本镜像(加载进去的香橙派的linux操作系统)自带SSH服务器,所以直接通过mobaXterm软件用SSH连接的方式登陆开发板就行。
一定要填下面的ip地址和用户名,用户名是对应开发板中@前面的用户名。也可以查看一下开发板的系统中还有没有别的用户,填上开发板存在的用户名进行登录就可以。
(扩展,如果使用VS code 通过SSH 连接上PC机上的虚拟机,首先虚拟机要连接上网络获得ip地址,其次是虚拟机要确认打开了SSH服务,因为有时候SSH服务是默认关闭的)。
设置一下用来保护存储信息(开发过程中产生的信息、记录)的密码。
我这里好像设置为qwe123。

设置完后,出现如下的画面,把之前通过串口连接的界面关掉就好了,之后我们就使用SSH网络连接的方式进行开发香橙派。

2.37 搭建SSH服务器 —— 额外的知识点
如果镜像没有自带SSH服务器,那需要自己搭建,怎么搭建呢?
————————————
到上面就已经结束了,下面是扩展内容
————————————
2.38 修改开发板内核启动日志级别
为了方便之后调试,因为香橙派开机启动的时候,加载uboot后,会加载内核(linux操作系统),那为了看到内核这过程中有没有出问题,可以修改内核的日志级别,让他把日志打印出来显示给我们看到。就很清晰的知道内核有没有问题了。
①使用sudo超级用户权限打开/boot/orangepiEnv.txt,
sudo vi /boot/orangepiEnv.txt
②修改里面的verbosity(日志级别),还有把console(输出日志信息的控制台)改为serial(串口)输出:
③ :wq 冒号wq保存退出

④这时候如果想看有没有改成功,可以切换到串口终端显示界面,因为我们刚刚②把console(输出日志信息的控制台)改为serial(串口)输出了。然后sudo reboot命令重启操作系统一下。就看到操作系统(内核kerne)重启时,输出了一堆操作系统(内核kernel)的信息了。

2.4 安装wiringPi库——官方的外设SDK
①在香橙派的linux上输入命令下载:
git clone https://github.com/orangepi-xunlong/wiringOP //下载源码
cd wiringOP //进入文件夹
sudo ./build clean //清除编译信息
sudo ./build //编译

如果下载不了就自己去GitHub上下载,然后上传到开发板
通过windows浏览器打开`https://github.com/orangepi-xunlong/wiringOP` 下载压缩包
把压缩包通过MobaXterm传到开发板
解压 unzip xxx.zip
cd xxx
sudo ./build
gpio readall
②编译完后,通过gpio readall 查看各个gpio口 或者 gpio -v查看版本,有东西出来说明就编译成功了。

二、基于OrangePi Zero2的智能家居
1. 需求及项目准备
- 语音接入控制各类家电,如客厅灯、卧室灯、风扇
- 回顾二阶段的Socket编程,实现Sockect发送指令远程控制各类家电
- 烟雾警报监测, 实时检查是否存在煤气泄漏或者火灾警情,当存在警情时及时触发蜂鸣器报警及语音播报
- 控制人脸识别打开房门功能,并语音播报识别成功或者失败
- 局域网实时视频监控
- OLED屏实话显示当前主板温度、警情信息及控制指令信息
人脸识别使用阿里SDK支持Python和Java接口,目的是复习巩固C语言的Python调用(也有看你使用翔云的SDK去实现),
此接口是人工智能接口,阿里云识别模型是通过训练后的模型,精准度取决于训练程度,人工智能范畴在常规嵌入式设备负责执行居多,
说白了嵌入式设备负责数据采集,然后转发给人工智能识别后,拿到结果进行执行器动作。
2. 开发过程
2.0 登录阿里云,创建阿里云账户,创建AccessKey。用来链接阿里云,获取权限。
2.1 把人的照片上传录进数据库
2.2 安装阿里云视觉智能API——人脸识别的SDK(后面人脸识别的python代码导入的库会用到)
pip install alibabacloud_facebody20191230
2.3 使用pip命令之前先安装pip命令,
sudo apt install python3-pip (通过APT包管理器安装pip。当运行这个命令时,你需要有管理员权限,所以使用了 sudo)
2.4 把AccessKey的账号和密码提供给orangePi,让它能通过AccessKey账号链接到阿里云,使用权限。
-
使用超级权限sudo才能修改配置文件,vi打开bash的rc(Resource Configuration )资源配置
sudo vi ~/.bashrc -
在bashrc配置文件,最后的结尾添加导入环境变量:
ALIBABA_CLOUD_ACCESS_KEY_ID和 ALIBABA_CLOUD_ACCESS_KEY_SECRET环境变量,
在垃圾分类的项目里如果已经添加过就不需要添加了
export ALIBABA_CLOUD_ACCESS_KEY_ID="你的KEY_ID"
export ALIBABA_CLOUD_ACCESS_KEY_SECRET="你的KEY_SECRECT"
2.5 这里用官方提供的人脸搜索Python示例代码试试:
# -*- coding: utf-8 -*-
# 引入依赖包
# pip install alibabacloud_facebody20191230
import os
import io
from urllib.request import urlopen
from alibabacloud_facebody20191230.client import Client
from alibabacloud_facebody20191230.models import SearchFaceAdvanceRequest
from alibabacloud_tea_openapi.models import Config
from alibabacloud_tea_util.models import RuntimeOptions
config = Config(
# 创建AccessKey ID和AccessKey Secret,请参考https://help.aliyun.com/document_detail/175144.html。
# 如果您用的是RAM用户的AccessKey,还需要为RAM用户授予权限AliyunVIAPIFullAccess,请参考https://help.aliyun.com/document_detail/145025.html。
# 从环境变量读取配置的AccessKey ID和AccessKey Secret。运行代码示例前必须先配置环境变量。
access_key_id=os.environ.get('ALIBABA_CLOUD_ACCESS_KEY_ID'),
access_key_secret=os.environ.get('ALIBABA_CLOUD_ACCESS_KEY_SECRET'),
# 访问的域名
endpoint='facebody.cn-shanghai.aliyuncs.com',
# 访问的域名对应的region
region_id='cn-shanghai'
)
search_face_request = SearchFaceAdvanceRequest()
#场景一:文件在本地
stream0 = open(r'/tmp/SearchFace.jpg', 'rb') #把需要识别的照片放这个目录下
search_face_request.image_url_object = stream0
#场景二:使用任意可访问的url
#url = 'https://viapi-test-bj.oss-cn-beijing.aliyuncs.com/viapi-3.0domepic/facebody/SearchFace1.png' #从url地址上读取照片
#img = urlopen(url).read()
#search_face_request.image_url_object = io.BytesIO(img)
search_face_request.db_name = 'default'
search_face_request.limit = 5
runtime_option = RuntimeOptions()
try:
# 初始化Client
client = Client(config)
response = client.search_face_advance(search_face_request, runtime_option)
# 获取整体结果
print(response.body)
except Exception as error:
# 获取整体报错信息
print(error)
# 获取单个字段
print(error.code)
# tips: 可通过error.__dict__查看属性名称
#关闭流
#stream0.close()
- 代码保存成face.py文件
- 把代码中场景二的部分注释掉,从本地(香橙派)获取图片
- 把需要识别的照片放代码的这个目录下
stream0 = open(r'/tmp/SearchFace.jpg', 'rb') - 搜索人脸的请求的数据库名称 改成 我们上传到阿里巴巴人脸识别数据库的名字default:
search_face_request.db_name = 'default' - 在香橙派linux命令终端执行
python3 face.py

2.6 执行后返回的结果是json格式的,结果如下:
在这份结果中,一般比对成功的Python字典数据里的score会有大于0.6的值,而比对失败score普遍低于0.1。
例如下面是比对成功的数据:
{'Data':
{'MatchList':
[
{'FaceItems':
[
{'Confidence': 80.54945, 'DbName': 'default', 'EntityId': 'wwx', 'FaceId': '88665949', 'Score': 0.7572572231292725},
{'Confidence': 77.51004, 'DbName': 'default', 'EntityId': 'wwx', 'FaceId': '88665951', 'Score': 0.7193253040313721},
{'Confidence': 74.420425, 'DbName': 'default', 'EntityId': 'wwx', 'FaceId': '88665946', 'Score': 0.6665557622909546},
{'Confidence': 11.461451, 'DbName': 'default', 'EntityId': 'gyx', 'FaceId': '88657431', 'Score': 0.0663260966539383},
{'Confidence': 5.28706, 'DbName': 'default', 'EntityId': 'gyx', 'FaceId': '88657429', 'Score': 0.030595608055591583}
],
'Location': {'Height': 527, 'Width': 405, 'X': 136, 'Y': 123},
'QualitieScore': 99.3521}
]
},
'RequestId': '6DE302BB130A-5D3C-B83D-0937D5A257FD'}
比对失败的数据则如下所示:
{'Data': {'MatchList': [{'FaceItems': [
{'Confidence': 6.137868, 'DbName': 'default', 'EntityId': 'gyx', 'FaceId': '88657429', 'Score': 0.03551913797855377},
{'Confidence': 2.9869182, 'DbName': 'default', 'EntityId': 'gyx', 'FaceId': '88657433', 'Score': 0.017284952104091644},
{'Confidence': 2.0808065, 'DbName': 'default', 'EntityId': 'gyx', 'FaceId': '88657431', 'Score': 0.01204138807952404},
{'Confidence': 0.71279377, 'DbName': 'default', 'EntityId': 'wwx', 'FaceId': '88657430', 'Score': 0.004124855622649193},
{'Confidence': 0.0, 'DbName': 'default', 'EntityId': 'wwx', 'FaceId': '88665951', 'Score': -0.09112970530986786}],
'Location': {'Height': 257, 'Width': 173, 'X': 156, 'Y': 42}, 'QualitieScore': 99.673065}]}, 'RequestId': '62C20100-CCAC-5FE2-9BA6AE583F0056EF'}
因此,就可以利用获取的最大score的值判断是否大于0.6来判断是否比对成功。
返回数据的说明:
Data:这是一个对象,其中包含了匹配列表的信息。
MatchList:这是一个数组,其中包含了匹配的结果。每个元素都是一个对象,代表一个匹配项。
FaceItems:这是一个数组,其中包含了匹配项中所有人脸的信息。每个元素都是一个对象,包含了一些关于
该人脸的信息,如自信度(Confidence)、数据库名(DbName)、实体ID(EntityId)、面部ID
(FaceId)和分数(Score)。
Location:这是一个对象,包含了人脸在原始图像中的位置信息,包括宽度(Width)、高度(Height)、
左上角的x坐标(X)和y坐标(Y)。
QualitieScore:这是一个浮点数,表示了整个匹配过程的质量得分。
2.7 使用C语言去调用上面的人脸搜索Python代码
2.71 封装人脸识别python代码
把上面的人脸搜索的python代码封装成 def alibaba_face(): 函数,方便C程序代码去调用,修改python代码,我们只要获取返回结果中最大的score值,修改后人脸搜索的python代码如下:
# -*- coding: utf-8 -*-
# 引入依赖包
# pip install alibabacloud_facebody20191230
import os
import io
from urllib.request import urlopen
from alibabacloud_facebody20191230.client import Client
from alibabacloud_facebody20191230.models import SearchFaceAdvanceRequest
from alibabacloud_tea_openapi.models import Config
from alibabacloud_tea_util.models import RuntimeOptions
config = Config(
# 创建AccessKey ID和AccessKey Secret,请参考https://help.aliyun.com/document_detail/175144.html。
# 如果您用的是RAM用户的AccessKey,还需要为RAM用户授予权限AliyunVIAPIFullAccess,请参考https://help.aliyun.com/document_detail/145025.html。
# 从环境变量读取配置的AccessKey ID和AccessKey Secret。运行代码示例前必须先配置环境变量。
access_key_id=os.environ.get('ALIBABA_CLOUD_ACCESS_KEY_ID'),
access_key_secret=os.environ.get('ALIBABA_CLOUD_ACCESS_KEY_SECRET'),
# 访问的域名
endpoint='facebody.cn-shanghai.aliyuncs.com',
# 访问的域名对应的region
region_id='cn-shanghai'
)
def alibaba_face():
search_face_request = SearchFaceAdvanceRequest()
#场景一:文件在本地
stream0 = open(r'/tmp/SearchFace.jpg', 'rb')
search_face_request.image_url_object = stream0
#场景二:使用任意可访问的url
#url = 'https://viapi-test-bj.oss-cn-beijing.aliyuncs.com/viapi-3.0domepic/facebody/SearchFace1.png'
#img = urlopen(url).read()
#search_face_request.image_url_object = io.BytesIO(img)
search_face_request.db_name = 'default'
search_face_request.limit = 5
runtime_option = RuntimeOptions()
try:
# 初始化Client
client = Client(config)
response = client.search_face_advance(search_face_request, runtime_option)
# 打印全部结果
#print(response.body)
# 获取结果中的MatchList列表
match_list = response.body.to_map()['Data']['MatchList']
# 获取结果中的MatchList列表中的FaceItems列表中的提取所有'Score'键的值,
# 并将这些值存储在一个新的列表 scores 中。
scores = [item['Score'] for item in match_list[0]['FaceItems']]
highest_score = max(scores) # 获取最大的scores值
value = round(highest_score, 2) # scores值保留两位小数
#print(match_list)
#print(value)
return value
except Exception as error:
# 获取整体报错信息
print(error)
# 获取单个字段
print(error.code)
return 0.0
# tips: 可通过error.__dict__查看属性名称
#关闭流
#stream0.close()
if __name__ == "__main__":
alibaba_face()
2.72 C语言调用python
① 搭建编译环境
科普知识点:
在写C语言调用Python代码时,我们会调用到很多函数,这些函数都在libpython3的 dev依赖库的库文件里面,所以需要安装libpython3的 dev依赖库,然后通过导入【依赖库的头文件】建立接口(API)来使用 【依赖库的库文件】中的函数。
(依赖包/依赖库中有很多库文件和头文件,库文件里面有许多功能函数,我们通过头文件提供的接口(API)去引用这些功能函数)
所以通过C语言调用Python代码前,需要先安装libpython3的 dev依赖库(不同的ubuntu版本下,python版本可能会有差异, 比如ubuntu 22.04里是libpython3.10-dev)。
首先可以通过以下命令验证是否是否已经存在python3的dev包
dpkg -l | grep libpython3
正常会有类似如下的输出,出现"libpython3"和 “dev”,如libpython3.10-dev即可:

如果没有, 可以通过apt命令安装相关的dev包:
sudo apt update
sudo apt install libpython3.10-dev
② C语言调用Python代码
参照之前5.3.3节的C语言调用有参python函数的做法,实现用C语言程序去调用上面封装的人脸搜索python代码,代码如下:
- 这里先在face.c里写个main主函数先测试一下
- 编译:
gcc face.c -o face -I /usr/include/python3.10 -L /usr/lib/python3.10 -lpython3.10
(gcc 源文件 -o 可执行文件 -l链接头文件路径 -L链接库路径 -链接库)
这里的-I、-L、 -l可以看交叉编译这章的——Makefile文件结构解析) - 执行:
./face - 执行结果如下:

#include <Python.h> //包含Python.h头文件,以便使用Python API
void face_init(void)
{
// 初始化Python环境(初始化Python解释器)
Py_Initialize();
// 获取sys.path对象,将当前路径"."添加到sys.path中,使得Python可以在当前路径"."中查找模块
// 导入Python的'sys'模块
PyObject *sys = PyImport_ImportModule("sys");
// 获取'sys'模块中的'path'属性
PyObject *path = PyObject_GetAttrString(sys, "path");
// 将"."添加到'sys.path'中,使得Python可以在当前目录查找模块
PyList_Append(path, PyUnicode_FromString("."));
}
void face_final(void)
{
// 结束Python环境(释放Python解释器)
Py_Finalize();
}
double face_category(void)
{
// 导入Python文件'face.py',并检查是否有错误
PyObject *pModule = PyImport_ImportModule("face"); //1.导入我们要调用的python文件,face.py
// 如果导入失败
if (!pModule)
{
// 打印错误信息
PyErr_Print();
// 输出错误信息
printf("Error: failed to load face.py\n");
// 跳转到模块加载失败处理部分
goto FAILED_MODULE;
}
// 获取'face.py'文件中的'alibabacloud_face'函数,并检查是否可调用
PyObject *pFunc = PyObject_GetAttrString(pModule, "alibaba_face"); //2.加载,加载这个python文件中的我们需要调用的功能
// 如果获取函数失败
if (!pFunc)
{
// 打印错误信息
PyErr_Print();
// 输出错误信息
printf("Error: failed to load alibabacloud_face\n");
// 跳转到函数加载失败处理部分
goto FAILED_FUNC;
}
// 3.加载完了,我们就调用这个函数('alibabacloud_face'函数),并获取返回值
PyObject *pValue = PyObject_CallObject(pFunc, NULL);
// 如果函数调用失败
if (!pValue)
{
// 打印错误信息
PyErr_Print();
// 输出错误信息
printf("Error: function call failed\n");
// 跳转到函数调用失败处理部分
goto FAILED_VALUE;
}
// 4.从alibab_face函数返回值中,解析double浮点数返回值,将结果转换为C语言格式,
// 并检查是否有错误,没有返回值时不需要调用。
double result = 0.0;
if (!PyArg_Parse(pValue, "d", &result))
{
// 打印错误信息
PyErr_Print();
// 输出错误信息
printf("Error: parse failed");
// 跳转到解析失败处理部分
goto FAILED_RESULT;
}
//printf("result=%lf\n",result); //封装起来后,在主函数中打印
//这是之前用来处理字符串的,
// // 分配内存来存储解析得到的结果字符串
// category = (char *)malloc(sizeof(char) * (strlen(result) + 1) );
// // 初始化分配的内存
// memset(category, 0, (strlen(result) + 1));
// // 复制结果字符串到新分配的内存中
// strncpy(category, result, (strlen(result) + 1));
FAILED_RESULT:
// 释放函数返回值对象
Py_DECREF(pValue);
FAILED_VALUE:
// 释放函数对象
Py_DECREF(pFunc);
FAILED_FUNC:
// 释放模块对象
Py_DECREF(pModule);
FAILED_MODULE:
// 返回原来的类别字符串
return result;
}
//if..endif结构,可以用来注释,如果是0就不执行,如果是1就执行。
#if 1
int main(int argc,char *argv[])
{
double face_result = 0.0;
face_init();
face_result = face_category();
printf("face_result=%lf\n",face_result);
face_final();
}
#endif
⑤ 封装成(face.c),创建(face.h头文件)提供接口,创建(main.c主程序)——最终的代码放到⑥
- 封装成(face.c文件),直接把face.c的main主函数注释掉,把if 1 设置为 if 0
- 创建(face.h文件)提供接口
- 创建(main.c主程序文件)通过(face.h文件)提供接口,去调用face.c中的函数
- 执行
gcc main.c face.c -o face2 -I /usr/include/python3.10 -L /usr/lib/python3.0/ -l python3.10 - 或执行
gcc main.c face.c -o face2 -I /usr/include/python3.10 -L /usr/lib/python3.0/ -lpython3.10
(gcc 源文件 -o 可执行文件 -l链接头文件路径 -L链接库路径 -链接库) - 执行结果

⑥ 最终项目的结构和代码
结构
main.c通过导入"face.h"得到接口,去调用face.c,face.c再去调用face.py。

代码
main.c(主程序)
//main.c
#include <stdio.h>
#include"face.h"
int main(int argc,char *argv[])
{
double face_result = 0.0;
face_init();
face_result = face_category();
printf("face_result=%lf\n",face_result);
face_final();
}
face.h(头文件接口)
//face.h
#ifndef __FACE__H
#define __FACE__H
void face_init(void);
void face_final(void);
double face_category(void);
#endif
face.c (C语言调用Python文件)
//face.c
#include <Python.h> //包含Python.h头文件,以便使用Python API
void face_init(void)
{
// 初始化Python环境(初始化Python解释器)
Py_Initialize();
// 获取sys.path对象,将当前路径"."添加到sys.path中,使得Python可以在当前路径"."中查找模块
// 导入Python的'sys'模块
PyObject *sys = PyImport_ImportModule("sys");
// 获取'sys'模块中的'path'属性
PyObject *path = PyObject_GetAttrString(sys, "path");
// 将"."添加到'sys.path'中,使得Python可以在当前目录查找模块
PyList_Append(path, PyUnicode_FromString("."));
}
void face_final(void)
{
// 结束Python环境(释放Python解释器)
Py_Finalize();
}
double face_category(void)
{
// 导入Python文件'face.py',并检查是否有错误
PyObject *pModule = PyImport_ImportModule("face"); //1.导入我们要调用的python文件,face.py
// 如果导入失败
if (!pModule)
{
// 打印错误信息
PyErr_Print();
// 输出错误信息
printf("Error: failed to load face.py\n");
// 跳转到模块加载失败处理部分
goto FAILED_MODULE;
}
// 获取'face.py'文件中的'alibabacloud_face'函数,并检查是否可调用
PyObject *pFunc = PyObject_GetAttrString(pModule, "alibaba_face"); //2.加载,加载这个python文件中的我们需要调用的功能
// 如果获取函数失败
if (!pFunc)
{
// 打印错误信息
PyErr_Print();
// 输出错误信息
printf("Error: failed to load alibabacloud_face\n");
// 跳转到函数加载失败处理部分
goto FAILED_FUNC;
}
// 3.加载完了,我们就调用这个函数('alibabacloud_face'函数),并获取返回值
PyObject *pValue = PyObject_CallObject(pFunc, NULL);
// 如果函数调用失败
if (!pValue)
{
// 打印错误信息
PyErr_Print();
// 输出错误信息
printf("Error: function call failed\n");
// 跳转到函数调用失败处理部分
goto FAILED_VALUE;
}
// 4.从alibab_face函数返回值中,解析double浮点数返回值,将结果转换为C语言格式,
// 并检查是否有错误,没有返回值时不需要调用。
double result = 0.0;
if (!PyArg_Parse(pValue, "d", &result))
{
// 打印错误信息
PyErr_Print();
// 输出错误信息
printf("Error: parse failed");
// 跳转到解析失败处理部分
goto FAILED_RESULT;
}
//printf("result=%lf\n",result); //封装起来后,在主函数中打印
//这是之前用来处理字符串的,
// // 分配内存来存储解析得到的结果字符串
// category = (char *)malloc(sizeof(char) * (strlen(result) + 1) );
// // 初始化分配的内存
// memset(category, 0, (strlen(result) + 1));
// // 复制结果字符串到新分配的内存中
// strncpy(category, result, (strlen(result) + 1));
FAILED_RESULT:
// 释放函数返回值对象
Py_DECREF(pValue);
FAILED_VALUE:
// 释放函数对象
Py_DECREF(pFunc);
FAILED_FUNC:
// 释放模块对象
Py_DECREF(pModule);
FAILED_MODULE:
// 返回原来的类别字符串
return result;
}
//if..endif结构,可以用来注释,如果是0就不执行,如果是1就执行。
#if 0
int main(int argc,char *argv[])
{
double face_result = 0.0;
face_init();
face_result = face_category();
printf("face_result=%lf\n",face_result);
face_final();
}
#endif
face.py(python人脸搜索代码)
#face.py
# -*- coding: utf-8 -*-
# 引入依赖包
# pip install alibabacloud_facebody20191230
import os
import io
from urllib.request import urlopen
from alibabacloud_facebody20191230.client import Client
from alibabacloud_facebody20191230.models import SearchFaceAdvanceRequest
from alibabacloud_tea_openapi.models import Config
from alibabacloud_tea_util.models import RuntimeOptions
config = Config(
# 创建AccessKey ID和AccessKey Secret,请参考https://help.aliyun.com/document_detail/175144.html。
# 如果您用的是RAM用户的AccessKey,还需要为RAM用户授予权限AliyunVIAPIFullAccess,请参考https://help.aliyun.com/document_detail/145025.html。
# 从环境变量读取配置的AccessKey ID和AccessKey Secret。运行代码示例前必须先配置环境变量。
access_key_id=os.environ.get('ALIBABA_CLOUD_ACCESS_KEY_ID'),
access_key_secret=os.environ.get('ALIBABA_CLOUD_ACCESS_KEY_SECRET'),
# 访问的域名
endpoint='facebody.cn-shanghai.aliyuncs.com',
# 访问的域名对应的region
region_id='cn-shanghai'
)
def alibaba_face():
search_face_request = SearchFaceAdvanceRequest()
#场景一:文件在本地
stream0 = open(r'/tmp/SearchFace.jpg', 'rb')
search_face_request.image_url_object = stream0
#场景二:使用任意可访问的url
#url = 'https://viapi-test-bj.oss-cn-beijing.aliyuncs.com/viapi-3.0domepic/facebody/SearchFace1.png'
#img = urlopen(url).read()
#search_face_request.image_url_object = io.BytesIO(img)
search_face_request.db_name = 'default'
search_face_request.limit = 5
runtime_option = RuntimeOptions()
try:
# 初始化Client
client = Client(config)
response = client.search_face_advance(search_face_request, runtime_option)
# 打印全部结果
#print(response.body)
# 获取结果中的MatchList列表
match_list = response.body.to_map()['Data']['MatchList']
# 获取结果中的MatchList列表中的FaceItems列表中的提取所有'Score'键的值,
# 并将这些值存储在一个新的列表 scores 中。
scores = [item['Score'] for item in match_list[0]['FaceItems']]
highest_score = max(scores) # 获取最大的scores值
value = round(highest_score, 2) # scores值保留两位小数
#print(match_list)
#print(value)
return value
except Exception as error:
# 获取整体报错信息
print(error)
# 获取单个字段
print(error.code)
return 0.0
# tips: 可通过error.__dict__查看属性名称
#关闭流
#stream0.close()
if __name__ == "__main__":
alibaba_face()
3. POSIX消息队列
3.0 消息队列基础知识链接:https://blog.csdn.net/Thenunaoer/article/details/143307134
3.1 示例1:开两个线程,使用阻塞方式去读写消息队列的数据
代码流程图:

代码:
// 包含所需的头文件
#include <pthread.h> // POSIX线程库
#include <stdio.h> // 标准输入输出库
#include <stdlib.h> // 标准库
#include <unistd.h> // UNIX标准库(sleep函数)
#include <mqueue.h> // POSIX消息队列库
#include <string.h> // 字符串处理库
// 定义消息队列的名称和要发送的消息
#define QUEUE_NAME "/test_queue" // 消息队列的名称
#define MESSAGE "Hello, World!" // 要发送的消息
// 全局的消息队列描述符
mqd_t mqd;
// sender_thread函数:发送线程的主体
void *sender_thread(void *arg) {
char message[] = MESSAGE; // 创建要发送的消息的副本
printf("Sender thread started.\n"); // 发送线程开始
sleep(10); //延时10秒,测试的时候看现象
mq_send(mqd, message, strlen(message) + 1, 0); // 发送消息到消息队列
printf("Message sent.\n"); // 发送线程已经发送结束
return NULL; // 返回NULL,表示线程正常结束
}
// receiver_thread函数:接收线程的主体
void *receiver_thread(void *arg) {
char buffer[256]; // 创建用于接收消息的缓冲区
printf("Receiver thread started.\n"); // 打印接收线程开始的消息
sleep(20); //延时30秒,测试的时候看现象
ssize_t receiver_size = mq_receive(mqd, buffer, sizeof(buffer), NULL); // 从消息队列接收消息
printf("Received message: %s receiver_size =%zd \n", buffer,receiver_size); // 打印已接收的消息的字符串
// 拓展.可以不打印
//————打印已接收的消息,在buffer中存储的字符,每个字符它的16进制 ==(8位二进制)
for (ssize_t i = 0; i < receiver_size; i++)
{
printf("0x%02x ", (unsigned char)buffer[i]);
}
return NULL; // 返回NULL,表示线程正常结束
}
// main函数:程序的入口点
int main() {
pthread_t sender, receiver; // 创建发送和接收线程的标识符
struct mq_attr attr; // 创建消息队列属性结构体变量
// 设置消息队列的属性值
attr.mq_flags = 0; // 消息队列的标志位设置为0
attr.mq_maxmsg = 10; // 消息队列的最大消息数设置为10
attr.mq_msgsize = 256; // 消息队列的每个消息的最大大小设置为256字节
attr.mq_curmsgs = 0; // 消息队列的当前消息数设置为0
// 打开或创建名为QUEUE_NAME的消息队列,并设置其属性为attr指定的值
mqd = mq_open(QUEUE_NAME, O_CREAT | O_RDWR, 0666, &attr);
if (mqd == (mqd_t)-1) { // 如果打开或创建失败,则打印错误信息并返回1
perror("mq_open");
return 1;
}
// 创建发送线程,如果创建失败,则打印错误信息并返回1
if (pthread_create(&sender, NULL, sender_thread, NULL) != 0) {
perror("pthread_create (sender)");
return 1;
}
// 创建接收线程,如果创建失败,则打印错误信息并返回1
if (pthread_create(&receiver, NULL, receiver_thread, NULL) != 0) {
perror("pthread_create (receiver)");
return 1;
}
// 等待发送线程结束,如果发送线程已经结束,则立即返回,否则阻塞等待其结束
pthread_join(sender, NULL);
// 等待接收线程结束,如果接收线程已经结束,则立即返回,否则阻塞等待其结束
pthread_join(receiver, NULL);
// 关闭已打开的消息队列描述符mq所引用的消息队列,并释放由该描述符占用的所有资源
mq_close(mqd);
sleep(25);//延时30秒,测试的时候看现象
// 删除名为QUEUE_NAME的消息队列,并将其从系统中删除,如果成功则返回0,否则返回-1并设置errno以指示错误。
mq_unlink(QUEUE_NAME); // 删除消息队列
return 0; // 程序正常退出,返回0
}
3.2 示例2: (mq_notify、sigev_notify = SIGEV_THREAD)通过注册信号事件通知,使用异步通知的方式实现去读写消息队列的数据
代码流程图:
完整版:

简单版:
+------------------------+
| 开始 |
| (main 函数启动程序) |
+------------------------+
|
v
+------------------------+
| 初始化消息队列 |
| - 设置最大消息数 10 |
| - 每条消息最大 256 字节 |
+------------------------+
|
v
+------------------------+
| 设置通知事件 |
| - 使用 SIGEV_THREAD |
| - 注册 notify_thread |
| 作为回调函数 |
+------------------------+
|
v
+------------------------+
| 创建发送线程 |
| - 创建 sender_thread |
+------------------------+
|
v
+------------------------+
| 在发送线程中发送消息 |
| - 发送消息内容: |
| "mqueue, test!" |
+------------------------+
|
v
+------------------------+
| 通知线程接收消息 |
| (notify_thread 触发) |
+------------------------+
|
v
+------------------------+
| 处理接收的消息 |
| - 显示消息内容 |
| - 打印消息大小 |
+------------------------+
|
v
+------------------------+
| 重新注册通知事件 |
| - 再次调用 mq_notify |
+------------------------+
|
v
+------------------------+
| 关闭消息队列 |
| 删除消息队列 |
+------------------------+
|
v
+------------------------+
| 程序结束 |
+------------------------+
流程图说明:
- 开始:程序启动,执行
main函数。 - 初始化消息队列:定义消息队列的属性,设置最大消息数、每条消息大小等。
- 设置通知事件:将
notify_thread设置为回调函数,通过mq_notify注册,当消息到达时触发。 - 创建发送线程:创建发送线程
sender_thread,准备发送消息。 - 发送消息:
sender_thread线程向消息队列发送消息 “mqueue, test!”。 - 通知线程接收消息:当有消息到达时触发
notify_thread,接收消息。 - 死循环处理接收的消息:
notify_thread中显示消息内容和大小。 - (这里没有用到,如果上面不是死循环接收消息,就需要重新注册通知事件,反复执行:有消息来了就获取消息)
重新注册通知事件:重新调用mq_notify注册通知事件,以便再次触发。 - 关闭消息队列:关闭并删除消息队列,释放资源。
- 程序结束:程序执行完毕,退出。
代码:
// 引入消息队列的头文件,包含消息队列的基本操作函数
#include <mqueue.h>
// 引入线程处理的头文件,用于创建和管理线程
#include <pthread.h>
// 引入标准输入输出的头文件,用于打印信息
#include <stdio.h>
// 引入错误处理的头文件,用于获取和处理错误码
#include <errno.h>
// 引入字符串处理的头文件,用于字符串操作
#include <string.h>
// 引入通用 UNIX I/O 操作的头文件,用于一些通用的操作函数
#include <unistd.h>
// 引入标准库函数的头文件,用于一些标准库函数
#include <stdlib.h>
// 引入信号处理的头文件,用于处理信号
#include <signal.h>
// 以下是一些消息队列的基本操作函数的声明,但由于 #if 0,这部分代码不会被编译
#if 0
mqd_t mq_open(const char *name, int oflag, mode_t mode, struct mq_attr attr );
// 打开或创建一个消息队列,返回消息队列描述符
int mq_send(mqd_t mqdes, const char *ptr, size_t len, unsigned int prio);
// 向消息队列发送消息
ssize_t mq_receive(mqd_t mqdes, char *ptr, size_t len, unsigned int *prio);
// 从消息队列接收消息
int mq_close(mqd_t mqdes);
// 关闭消息队列
int mq_unlink(const char *name);
// 删除消息队列
struct mq_attr {
long mq_flags;//阻塞标志, 0(阻塞)或O_NONBLOCK
long mq_maxmsg;//最大消息数
long mq_msgsize;//每个消息最大大小
long mq_curmsgs;//当前消息数
};
// 消息队列属性的结构体,定义了消息队列的一些属性
union sigval { /* 数据传递给通知 */
int sival_int; /* 整数值 */
void *sival_ptr; /* 指针值 */
};
// 传递给信号事件中的回调函数的参数,可以传递整数或指针类型的值
struct sigevent {
int sigev_notify; /* 通知方式 */
int sigev_signo; /* 通知信号 */
union sigval sigev_value;
/* 数据传递给通知 */
void (*sigev_notify_function) (union sigval);
/* 用于线程通知的回调函数 */
void *sigev_notify_attributes;
/* 用于线程通知的属性 */
pid_t sigev_notify_thread_id;
/* 用于线程通知的目标线程ID */
};
// 用于设置信号事件的通知方式,包括回调函数和参数
#endif
// 定义消息队列的名字
#define QUEQUE_NAME "/test_queue"
// 定义发送的消息内容
#define MESSAGE "mqueque,test!"
// 线程函数————发送数据
void *sender_thread(void *arg)
{
// 从传入的参数中获取消息队列描述符
mqd_t mqd = *(mqd_t *)arg;
int send_size = -1; // 用于存储发送消息的返回值
char message[] = MESSAGE; // 发送的消息内容
// 打印发送的消息内容和消息队列描述符
printf("sender thread message=%s, mqd=%d\n", message, mqd);
// 发送消息————使用 mq_send 函数来发送一个消息到指定的消息队列
// strlen(message) + 1 是为了包括字符串末尾的 '\0'
send_size = mq_send(mqd, message, strlen(message) + 1, 0);
if (-1 == send_size) //成功发送后,函数返回0,否则返回-1,并设置 errno 来表明错误的原因。
{
if (errno == EAGAIN)
{
printf("message queque is full\n"); // 如果消息队列满了,打印提示
}
else
{
perror("mq_send"); // 如果发送失败,打印错误信息
}
}
return NULL; // 线程结束
}
// 线程函数————信号事件的回调函数
void notify_thread(union sigval sval)
{
// 初始化消息队列描述符为 -1
mqd_t mqd = -1;
mqd = *((mqd_t *)sval.sival_ptr); // 从传入的参数中获取消息队列描述符
char buffer[256]; // 定义一个缓冲区,用于存储接收到的消息
memset(buffer,0,sizeof(buffer));//清空一下缓冲区
ssize_t bytes_read; // 定义一个变量,用于存储接收到的消息的大小
struct sigevent sev; // 定义一个结构体,用于重新注册消息队列的通知
printf("notify_thread started, mqd=%d\n", mqd);
// 打印提示信息,表明线程开始运行
while (1)
{
// 使用 q_receive函数 从消息队列中接收消息到buffer中
// 并返回 收到的消息的大小 给bytes_read
bytes_read = mq_receive(mqd, buffer, 256, NULL);
if (bytes_read == -1)
{
if (errno == EAGAIN)
{
printf("queue is empty\n"); // 如果队列为空,打印提示
break; // 跳出循环
}
else
{
perror("mq_receive"); // 如果接收失败,打印错误信息
exit(1); // 退出程序
}
}
// 如果接收成功,打印接收到的消息的大小和内容
printf("read %ld bytes: %s\n", (long)bytes_read, buffer);
}
//上面死循环了,可以一直获取信息。下面不用重新注册了,也不会执行
sev.sigev_notify = SIGEV_THREAD; // 设置通知方式为线程模式
sev.sigev_value.sival_ptr = &mqd; // 设置传递给回调函数的参数,传递消息队列描述符的地址
sev.sigev_notify_function = notify_thread; // 设置回调函数为 notify_thread
sev.sigev_notify_attributes = NULL; // 设置线程属性为 NULL
if (mq_notify(mqd, &sev) == -1)
{
perror("mq_notify"); // 如果重新注册通知失败,打印错误信息
exit(1); // 退出程序
}
}
// 以下是一个接收线程函数,但由于 #if 0,这部分代码不会被编译
#if 0
void *receiver_thread(void *arg)
{
// 从传入的参数中获取消息队列描述符
mqd_t mqd = *(mqd_t *)arg;
ssize_t receiver_size = -1; // 用于存储接收消息的返回值
char buffer[256]; // 定义一个缓冲区,用于存储接收到的消息
printf("Receive thread start\n");
receiver_size = mq_receive(mqd, buffer, sizeof(buffer), NULL);
// 接收消息
printf("receiver thread message=%s, mqd=%d, receiver_size=%ld\n", buffer, mqd, receiver_size);
// 如果接收成功,打印接收到的消息的大小和内容
return NULL; // 线程结束
}
#endif
int main(int argc, char *argv[])
{
// 定义发送线程和接收线程的ID
pthread_t sender, receiver;
//—————————一、给当前我们现在的进程创建消息队列mqd,并设置消息队列mqd的属性————————————
// 初始化消息队列描述符为 -1
mqd_t mqd = -1;
// 定义消息队列属性结构体
struct mq_attr attr;
attr.mq_flags = 0; // 设置阻塞标志为 0(阻塞模式)
attr.mq_maxmsg = 10; // 设置最大消息数为 10
attr.mq_msgsize = 256; // 设置每个消息的最大大小为 256 字节
attr.mq_curmsgs = 0; // 设置当前消息数为 0
// 打开或创建消息队列,设置为读写模式,并传入消息队列属性
mqd = mq_open(QUEQUE_NAME, O_CREAT | O_RDWR, 0666, &attr);
if (mqd == (mqd_t)-1 )
{
perror("mq_open"); // 如果打开失败,打印错误信息
return -1; // 返回错误码
}
// 定义一个结构体,用于设置信号事件的通知方式
struct sigevent sev;
sev.sigev_notify = SIGEV_THREAD; // 设置通知方式为线程模式
sev.sigev_notify_function = notify_thread; // 设置回调函数为 notify_thread
sev.sigev_notify_attributes = NULL; // 设置线程属性为 NULL
sev.sigev_value.sival_ptr = &mqd; // 设置数据为消息队列描述符的地址
/*mq_notify
函数用于通知进程当中的消息队列有新消息的到达。当消息队列中消息的数量从0变为1时,
系统会向指定的进程发送一个实时信号,或者通过异步I/O通知机制通知进程。*/
//注册通知,给消息队列mqd注册通知方式为sev
if (mq_notify(mqd, &sev) == -1)
{
perror("mq_notify"); // 如果注册通知失败,打印错误信息
exit(1); // 退出程序
}
//—————————二、创建发送线程:创建一个线程,执行发送函数,发送数据到消息队列中————————————
if (pthread_create(&sender, NULL, sender_thread, (void *)&mqd) != 0)
{
perror("pthread_create sender"); // 如果创建发送线程失败,打印错误信息
return -1; // 返回错误码
}
// 以下是一个创建接收线程的语句,但由于 #if 0,这部分代码不会被编译
#if 0
if (pthread_create(&receiver, NULL, receiver_thread, (void *)&mqd) != 0)
{
perror("pthread_create receiver"); // 如果创建接收线程失败,打印错误信息
return -1; // 返回错误码
}
#endif
//——————————————————————三、等待线程结束————————————————————
// 等待发送线程结束
pthread_join(sender, NULL);
sleep(5); // 等待一段时间,确保消息全被获取到,等notify_thread(union sigval sval)执行完
// 等待接收线程结束
// pthread_join(receiver, NULL);
mq_close(mqd); // 关闭消息队列
mq_unlink(QUEQUE_NAME); // 删除消息队列
return 0; // 程序正常结束
}
4.先不交叉编译版本
思路:按照智能分类项目。不交叉编译时候的,不需要src和ins和3rd目录。
只用这个命令就可以了:
**垃圾桶网络编程部分:**
编译:gcc -o category *.c *.h -I /usr/include/python3.10/ -lwiringPi -lpython3.10
gcc -o category *.c *.h -I /usr/include/python3.10/ -lwiringPi -lpython3.10
执行sudo -E ./category
3rd目录:里面包括了交叉编译时,【宿主虚拟机】编译时需要的wiringPi库、运行python需要链接的库、C调用PYthon需要的库啥的。。。但是现在我们不交叉编译,直接在嵌入式【目标设备香橙派】中编译代码,香橙派中有这些库了-lwiringPi -lpython3.10。
1.把功能代码都给封装好。新建了两个头文件:
gdevice.h:用来管理所有的设备节点
control.h:用来建立所有所有的监听节点。监听到了就进行相关的控制操作。
2.封装消息队列.c和.h文件,用来发送和接受消息:
msg_queue.c
msg_queue.h
4.2智能中控项目的软件实现
4.2.1 项目整体设计
首先这个项目分别可以分为4个部分,分别为语音
整体的软件框架大致如下:
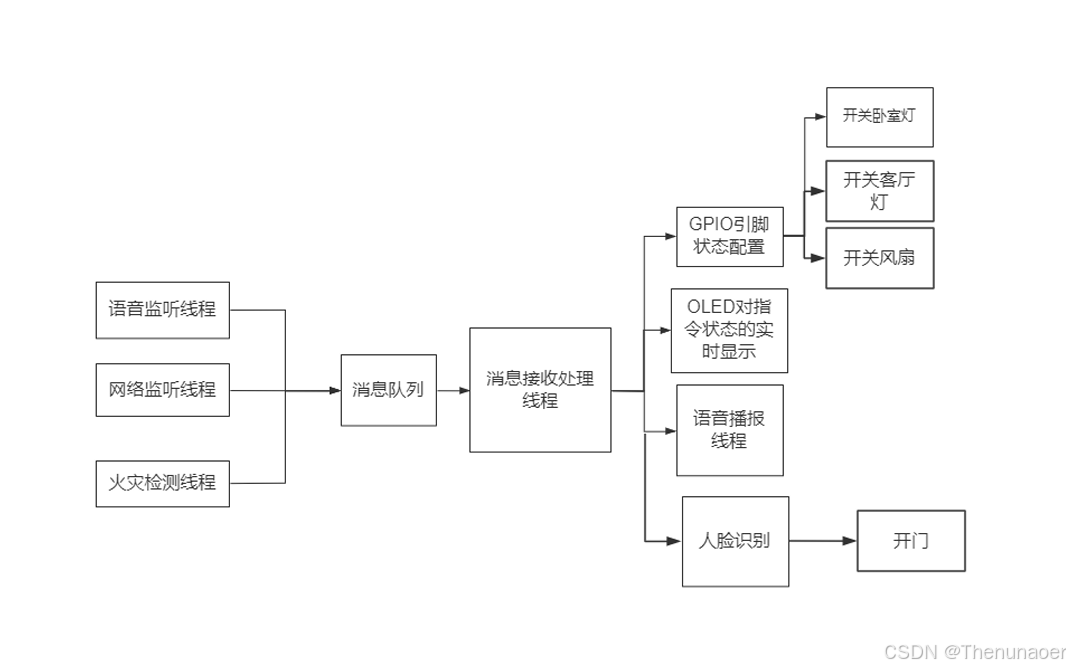
整个项目开启4个监听线程, 分别是:
- 语音监听线程:用于监听语音指令, 当有语音指令过来后, 通过消息队列的方式给消息处理线程发送指令
- 网络监听线程:用于监听网络指令,当有网络指令过来后, 通过消息队列的方式给消息处理线程发送指令
- 火灾检测线程:当存在煤气泄漏或者火灾闲情时, 发送警报指令给消息处理线程
- 消息监听线程: 用于处理以上3个线程发过来的指令,并根据指令要求配置GPIO引脚状态,OLED屏显示、语音播报,还有人脸识别开门
上述四个线程采用统一个对外接口,同时添加到监听链表中。
统一的监听模块接口如下:
//control.h
// 如果 __CONTROL_H 这个宏没有被定义过
#ifndef __CONTROL_H
// 那么定义这个宏
#define __CONTROL_H
// 定义一个控制结构体,用来建立我们所有的监听节点。
// 语音监听线程、Socket监听线程、烟雾检测线程、消息接收处理线程都在这里实现。
// 所有监听线程接口都用这个结构体实现
struct control
{
// 监听模块的名称,用于标识不同的模块
// 例如:"语音识别模块、网络监听模块、火灾检测模块、消息监听模块等
char control_name[128]; // 监听模块名称
// 初始化函数指针,指向初始化模块的函数
int (*init)(void); // 初始化函数
// 结束释放函数指针,指向释放模块资源的函数
void (*final)(void); // 结束释放函数
// 监听函数指针,指向模块的监听函数
// 这个函数用于监听外部事件或获取外部数据,如语音监听、网络监听、火焰检查数据等
void *(*get)(void *arg);
// 设置函数指针,指向模块的设置函数
// 这个函数用于设置模块的状态或发送数据,如发送语音播报、发送网络请求、设置火焰检查阈值等
void *(*set)(void *arg);
// 指向下一个控制结构体的指针,用于构建链表
// 通过这个指针可以将多个控制模块链接在一起,统一进行管理
// 比如将语音识别模块、网络监听、火焰检查模块链接成一个链表,
// 然后通过指针遍历这个链表来从而遍历各个控制模块,然后调用这些模块的监听和设置函数
struct control *next;
};
// 头插法,用于control类链表的创建
// 定义一个函数,将新的控制模块接口添加到控制模块链表中
// 参数 phead 是链表的头指针
// 参数 device 是要添加的新控制模块
// 返回值是更新后的链表头指针
//struct control *add_interface_to_ctrl_list(struct control *phead, struct control *new_ctrl);
struct control *add_interface_to_ctrl_list(struct control *phead, struct control *control_interface);
#endif
// if...endif结构,if如果...就执行,否则就endif结束
5.开启远程监控
先ps查看进程的时候,看看有没有一个mjpg的一个服务,如图显示的是这里没有启动mjpg服务,要去配置一下

找到智能分类,摄像头那块,要去开启服务,
要求 修改这个字段:
修改 start.sh脚本,将start.sh里的:
./mjpg_streamer -i "./input_uvc.so" -o "./output_http.so -w ./www"
字段改成:
./mjpg_streamer -i "./input_uvc.so -d /dev/video1 -u -f 30" -o
"./output_http.so -w ./www" #注意这里的video1需要根据实际情况修改
或者去配置autostar

















 73
73

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









