







一、范数
1.范数与内积
- 内积:对两个空间进行内积运算可以得到一个实数集
- 范数:对一个空间可以直接进行向量“大小”的衡量,得到实数集

2.向量范数
正定性:范数为0,则每个向量必为0

3.例题(向量范数判断)
4.p级范数
注意,范数|Y|若是一个平面直角坐标系,横轴为实数,纵轴为虚数。值为平面坐标系中线段长度。

x的1-范数为:1+|2+i|+|i|+1= 根号(5) + 3
x的2-范数为:根号(1+5+1+1)= 根号(8)
x的无穷范数为:max{1,根号(5),1,1}=根号(5)
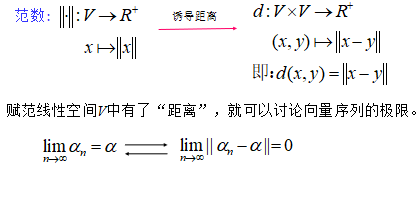
作用在于:对于赋范线性空间的量化


另外,我们可以通过范数求得向量序列的极限
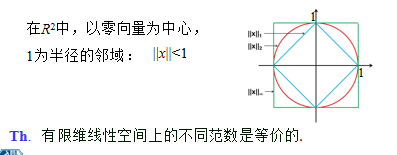
5.范数等价

例如:1-范数为菱形,2-范数构成了一个圆:
由于矩阵可以表示为mn维向量,于是将Aij元素看作一个向量。

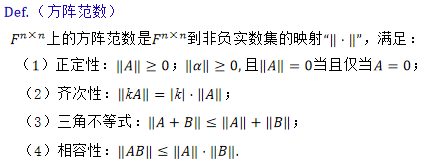
6.方阵范数
方阵范数比向量范数多了一个相容性,因为方阵可以进行矩阵乘法
常用的矩阵范数

7.方阵范数与向量范数的相容性
- 定义

- 相容性的直观解释
- 相容性的作用
- 重要结论

例如:
8.特征值与范数的关系

注:利用该定理,可以对特征值的模进行估计

求矩阵的范数,第一范数是对列元素求模相加后取最大值;无穷范数是对行元素求模相加后取最大值。
二、向量序列和矩阵序列的极限
1.概念


2.性质

3、例题(求矩阵极限)
感觉和普通极限求解差不多,就是每个元素对应位置都要求一个极限。

4.例题(幂矩阵极限为0)

三、矩阵幂级数
1、矩阵级数

2、例题(求矩阵极限)
每个矩阵元素位置都求极限

注意等比数列计算公式:

3、收敛性质

四、矩阵函数收敛性
1.概念

复级数是由一个实数加虚数组成的,其中实部和虚部部分都是实函数。

2.收敛半径计算

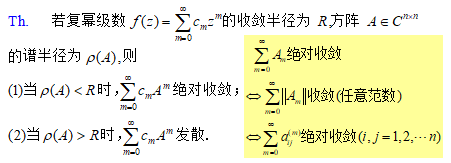
3.谱半径计算

4.复幂级数计算
5.例题(矩阵幂级数收敛性判断)

6.例题(矩阵幂级数收敛性判断)

7.例题(矩阵幂级数收敛性判断)

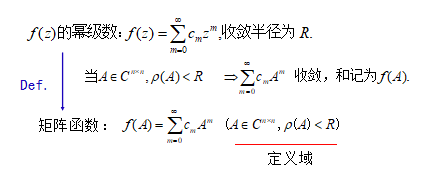
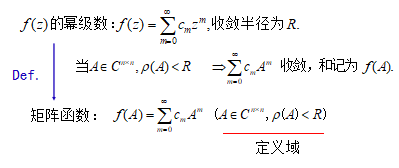
五、矩阵函数
1.概念
2.待定系数法求函数值



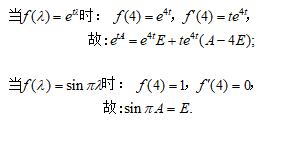
3.例题(待定系数法求矩阵函数)

4.例题(待定系数法求矩阵函数)
??最小多项式不明白为什么变成了2

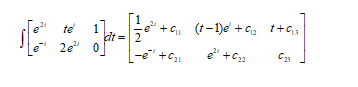
五、函数矩阵的微分与积分
就是把每个位置上的元素分别进行了微分和积分

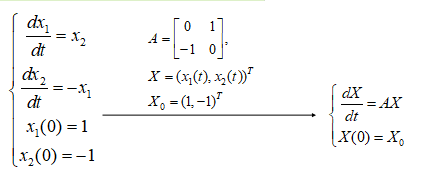
六、矩阵函数在微分方程组的应用
这个A是咋得出来的。。。
解答:A中每一行对应一个微分式子,第一个元素为0表示是对x1微分,所以为0;第二个元素为1是积分式中x2前的系数为1。
1.一阶线性常微分齐次微分方程组的计算

2.例题(一阶线性常微分齐次微分方程组的计算)

- 首先,将原始方程组转换为一般形式,求出A^n
- 然后计算出eAt,并按照An进行化解
- 最后将上式中的级数分解并合并,根据X(t)=e^AtX0求出X(t)
















 1260
1260











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









