






无人驾驶车辆第七章高速mpc的例子复现,包含caraim文件,simulink文件和m文件,不包含指导,目前成功退换为双移线
版本是18matlab 19carsim
ID:4670673545085298
mpc跟踪控制
无人驾驶车辆在当今科技领域引起了广泛关注和研究。随着无人驾驶技术的不断发展,各种算法和控制方法被提出和应用于该领域。本文旨在复现无人驾驶车辆高速模型预测控制(Model Predictive Control,MPC)的案例,并提供相关文件和版本信息。
在本次复现中,我们使用的是Matlab 18版本以及Carsim 19版本。其中,Matlab是一种功能强大的数学计算软件,Carsim则是一款用于车辆动力学仿真的软件。这两个软件的结合为我们提供了便捷而高效的无人驾驶车辆仿真和控制环境。
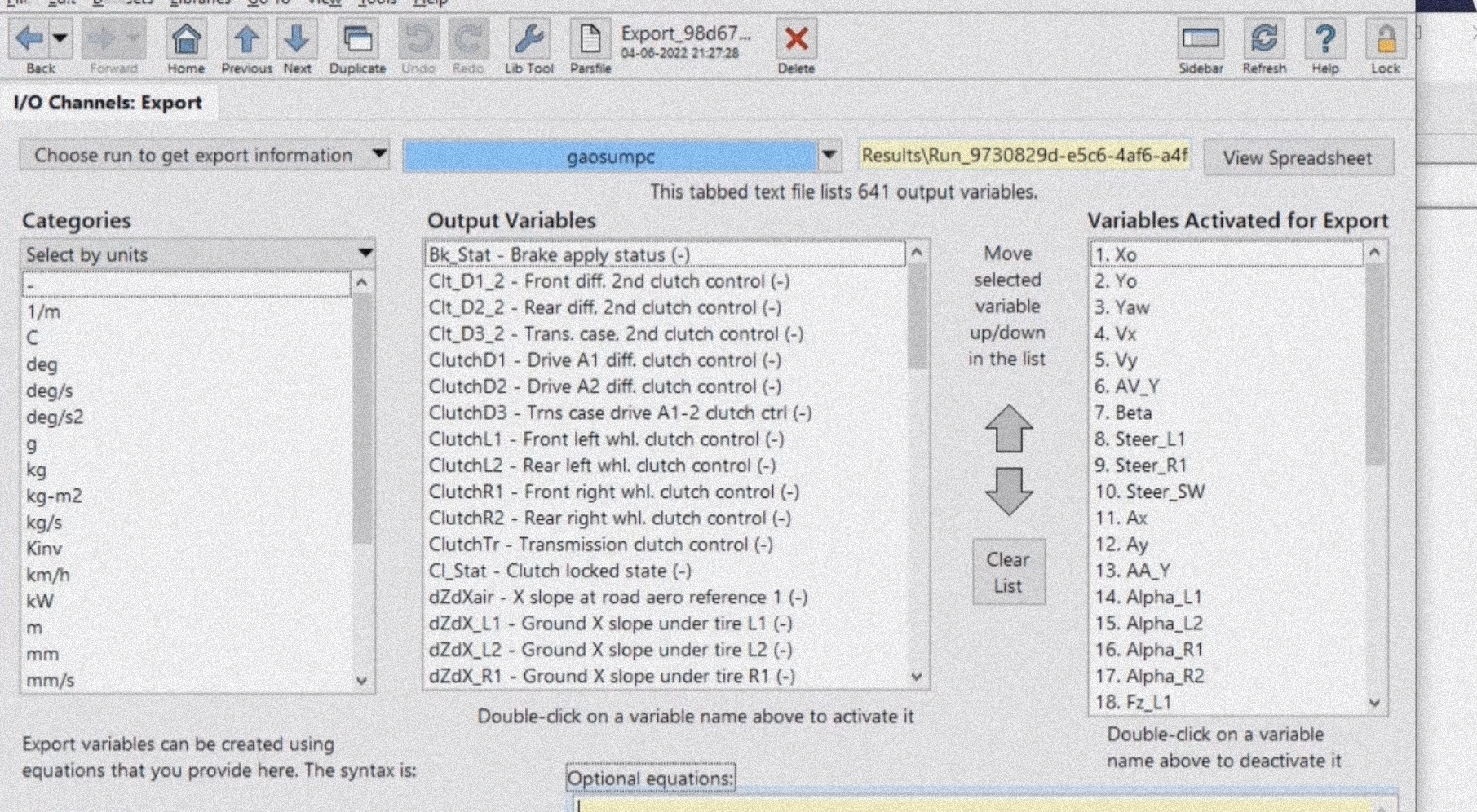
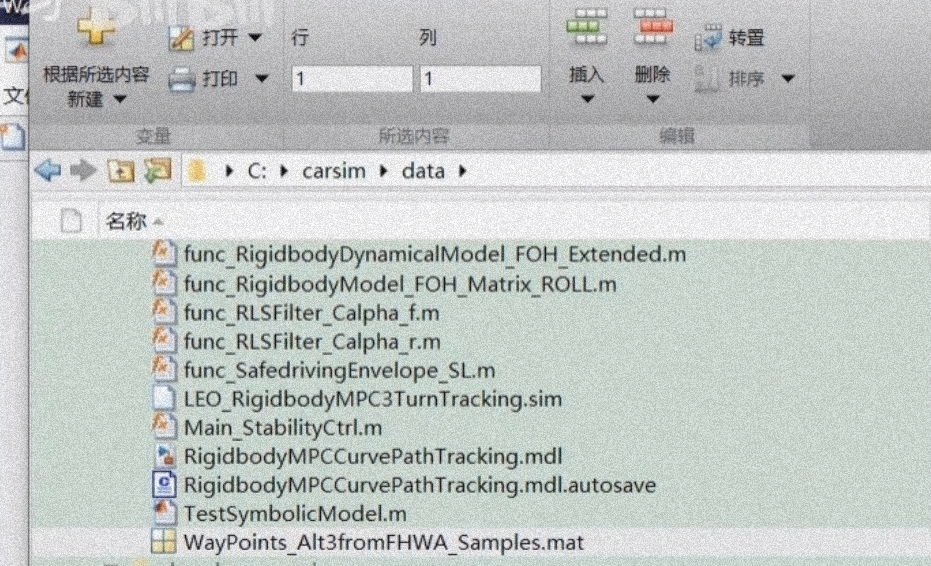
复现案例涉及到的文件包括caraim文件、Simulink文件和一个m文件。其中,caraim文件是无人驾驶车辆的仿真参数和设置文件,Simulink文件是用于模型预测控制的仿真模型文件,而m文件则包含了具体的控制算法和逻辑。
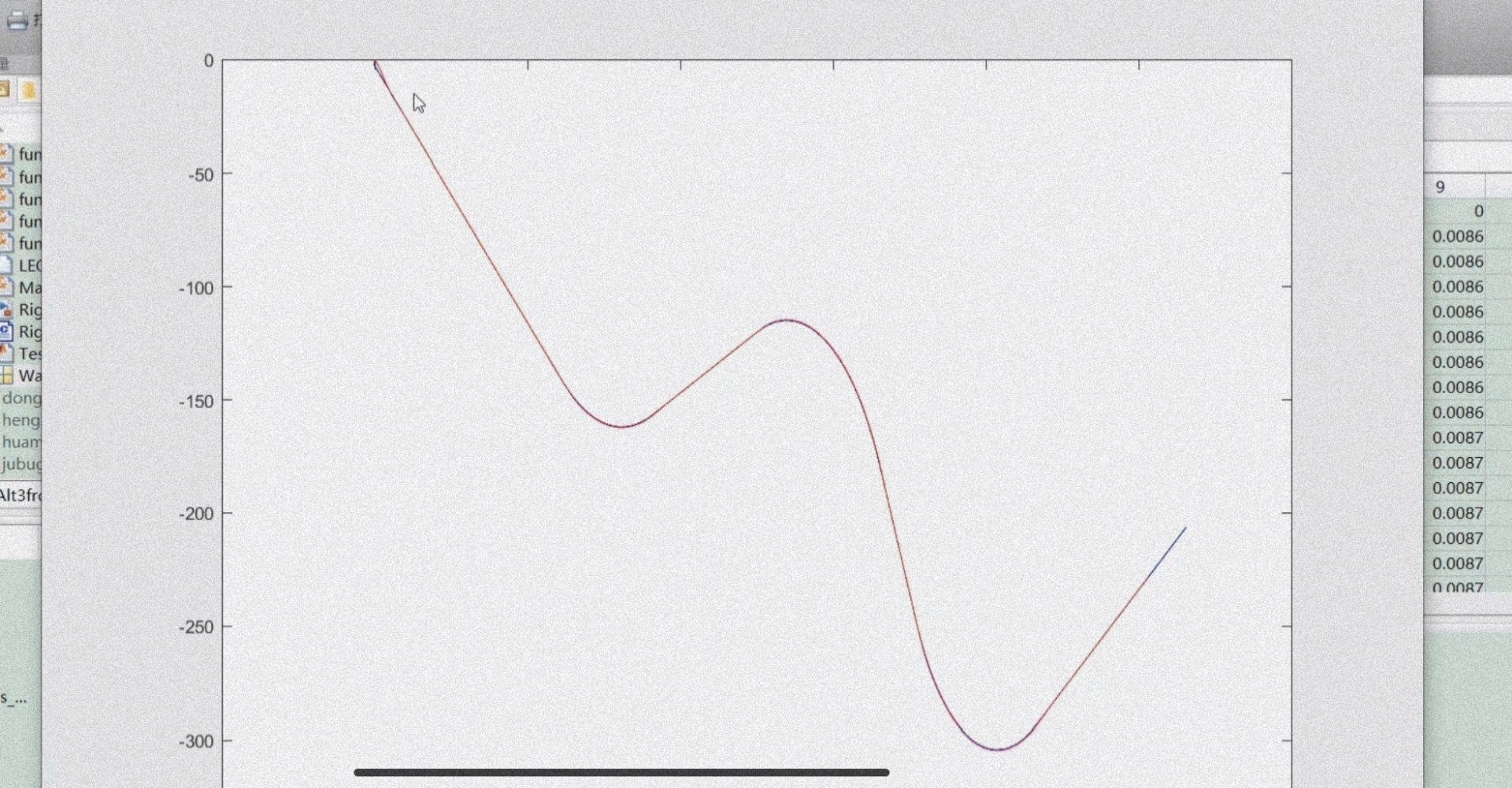
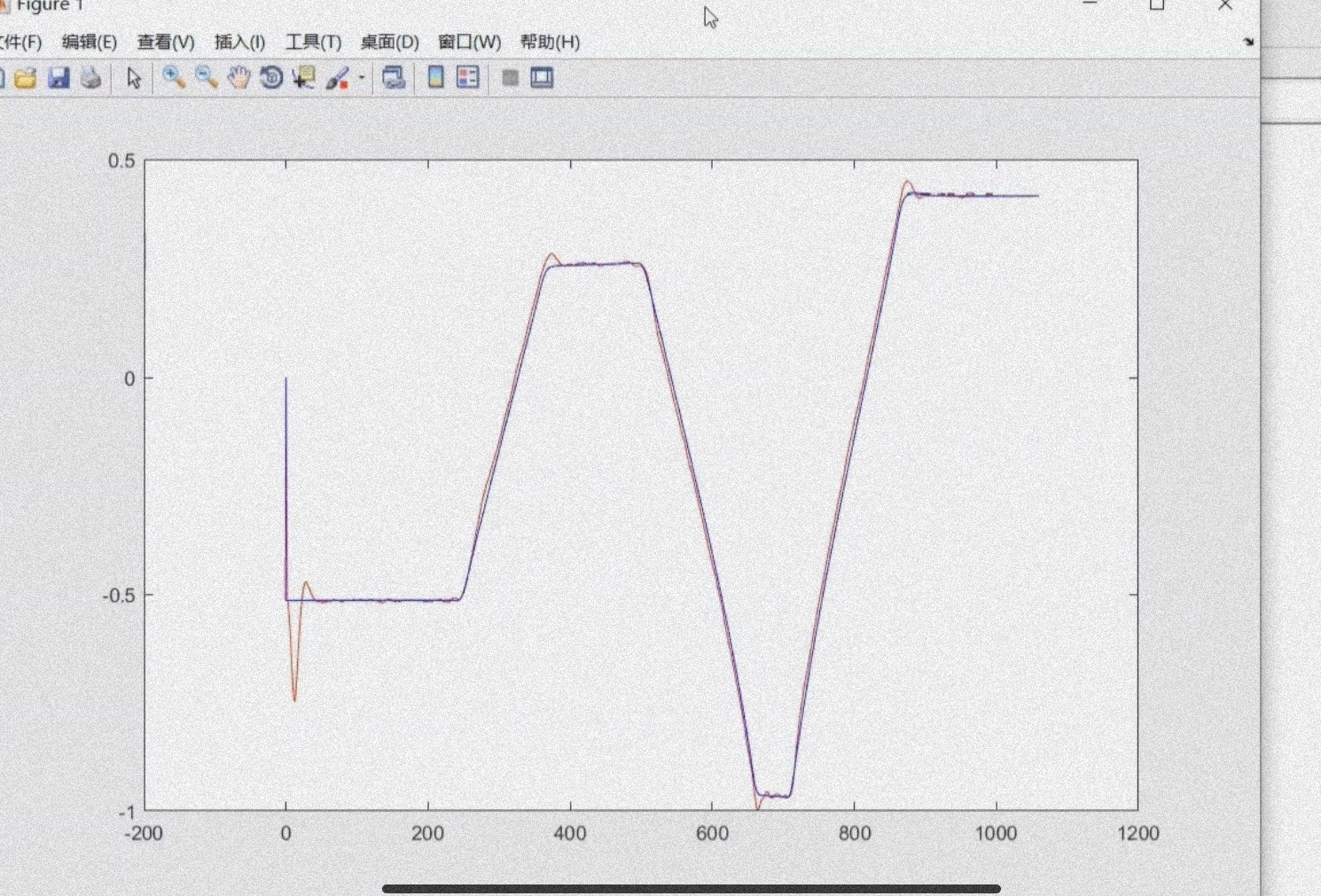
通过这一模型示例的复现,我们可以深入理解和研究无人驾驶车辆的高速控制策略。在复现过程中,我们可以从caraim文件中了解到无人驾驶车辆的具体参数和动力学设置,这对于进一步优化控制算法和模型预测控制是至关重要的。同时,通过Simulink文件的仿真,我们可以观察到无人驾驶车辆在高速行驶过程中的行为和性能。
需要注意的是,本次复现不包含具体的指导和教程。相反,我们提供的是一个完整的案例,供程序员和研究人员进行实际操作和进一步研究。通过对这个案例的复现,我们可以更好地理解和运用MPC算法在无人驾驶车辆高速控制中的应用。
值得一提的是,本次复现成功实现了退换为双移线的目标。这一成果表明了MPC算法在无人驾驶车辆控制中的有效性和可行性。通过模型预测控制的策略,无人驾驶车辆可以更准确地判断车道线位置和维持车辆在复杂高速环境中的稳定性。
综上所述,本文通过复现无人驾驶车辆高速MPC的案例,提供了caraim文件、Simulink文件和m文件等相关资源。这些资源可以帮助程序员和研究人员更好地理解和应用MPC算法在无人驾驶车辆控制中的作用。通过搭建模拟环境和实际仿真,我们可以不断优化和改进无人驾驶车辆的控制策略,为实现更安全、可靠和智能的无人驾驶技术提供支持和指导。
相关的代码,程序地址如下:http://wekup.cn/673545085298.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









