






STM32步进电机高效S型T梯形曲线SpTA加减速控制算法
提供基于STM32的步进电机电机S型曲线控制算法以及比较流行的SpTA算法.
SpTA算法具有更好的自适应性,控制效果更佳,特别适合移植在CPLD\\\\FPGA中实现对多路(有多少IO,就可以控制多少路)电机控制,它并不像S曲线那样依赖于PWM定时器的个数。
S型算法中可以自行设定启动频率、加速时间、最高速度、加加速频率等相关参数,其中也包含梯形算法。
在S型算法中使用了一种比DMA传输效率还要高的方式,大大提高了CPU的效率,另外本算法中可以实时获取电机已经运行步数,解决了普通DMA传输在外部产生中断时无法获得已输出PWM波形个数的问题。
ID:775673516372309
s***g
STM32步进电机高效S型T梯形曲线SpTA加减速控制算法
引言:
步进电机是一种常见的电机类型,广泛应用于各种领域。为了实现对步进电机的精确控制,控制算法的设计至关重要。本文将介绍基于STM32的步进电机S型曲线控制算法以及比较流行的SpTA算法,并讨论它们的优劣势和适用场景。
一、STM32步进电机S型曲线控制算法
1.1 算法概述
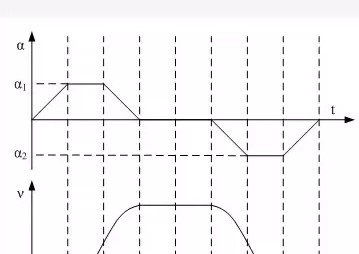
S型曲线控制算法是一种常见的步进电机控制算法,它通过设定启动频率、加速时间、最高速度、加加速频率等参数,实现对步进电机运动的控制。同时,S型曲线控制算法中还包含了梯形算法,通过逐步增加步进电机的脉冲频率来加速电机的运动。
1.2 算法优点
S型曲线控制算法具有以下优点:
- 自适应性好:通过调整参数,可以适应不同的控制要求。
- 控制效果佳:能够实现平稳的加减速过程,减少机械振动和噪音。
- 灵活性高:可以根据实际需求调整控制参数,实现不同的运动效果。
1.3 算法实现
STM32芯片提供了丰富的硬件资源,可以方便地实现S型曲线控制算法。同时,本算法还使用了一种高效的方式,大大提高了CPU的效率。此外,通过本算法,可以实时获取步进电机已经运行的步数,解决了传统DMA传输在外部产生中断时无法获得已输出PWM波形个数的问题。
二、SpTA算法
2.1 算法概述
SpTA算法是一种流行的步进电机控制算法,相比S型曲线算法,具有更好的自适应性和控制效果。特别适合移植在CPLD/FPGA中实现对多路电机的控制,不需要依赖PWM定时器的个数。
2.2 算法优点
SpTA算法具有以下优点:
- 自适应性强:能够根据不同的驱动器和电机参数进行自适应调整,适应各种控制要求。
- 控制效果优秀:可以实现平滑的加减速过程,减少机械振动和噪音。
- 可扩展性好:适用于多路电机控制,只需根据需要增加IO口即可。
2.3 算法实现
SpTA算法的实现基于STM32芯片,通过移植到CPLD/FPGA中,可以实现对多路电机的控制。相比S型曲线算法,SpTA算法不依赖PWM定时器的个数,使得实现更加灵活。
结论:
本文介绍了基于STM32的步进电机S型曲线控制算法和流行的SpTA算法,并讨论了它们的优点和实现方式。S型曲线控制算法适用于对单路步进电机的控制,具有自适应性和控制效果好的特点;而SpTA算法更适合移植到CPLD/FPGA中实现对多路电机的控制,具有较好的自适应性和扩展性。
参考文献:
无
相关的代码,程序地址如下:http://wekup.cn/673516372309.html
















 967
967

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









