






 本文详细介绍了一套基于STM32F103C8T6和NRF24L01的遥控小车系统,通过摇杆控制小车运动和舵机转向。提供了发射端原理图、PCB、源码及接收端接线图和源码,还附带了使用说明,展示了系统的设计过程和灵活性。
本文详细介绍了一套基于STM32F103C8T6和NRF24L01的遥控小车系统,通过摇杆控制小车运动和舵机转向。提供了发射端原理图、PCB、源码及接收端接线图和源码,还附带了使用说明,展示了系统的设计过程和灵活性。
STM32F103C8T6(C6T6)遥控小车发射接收模块
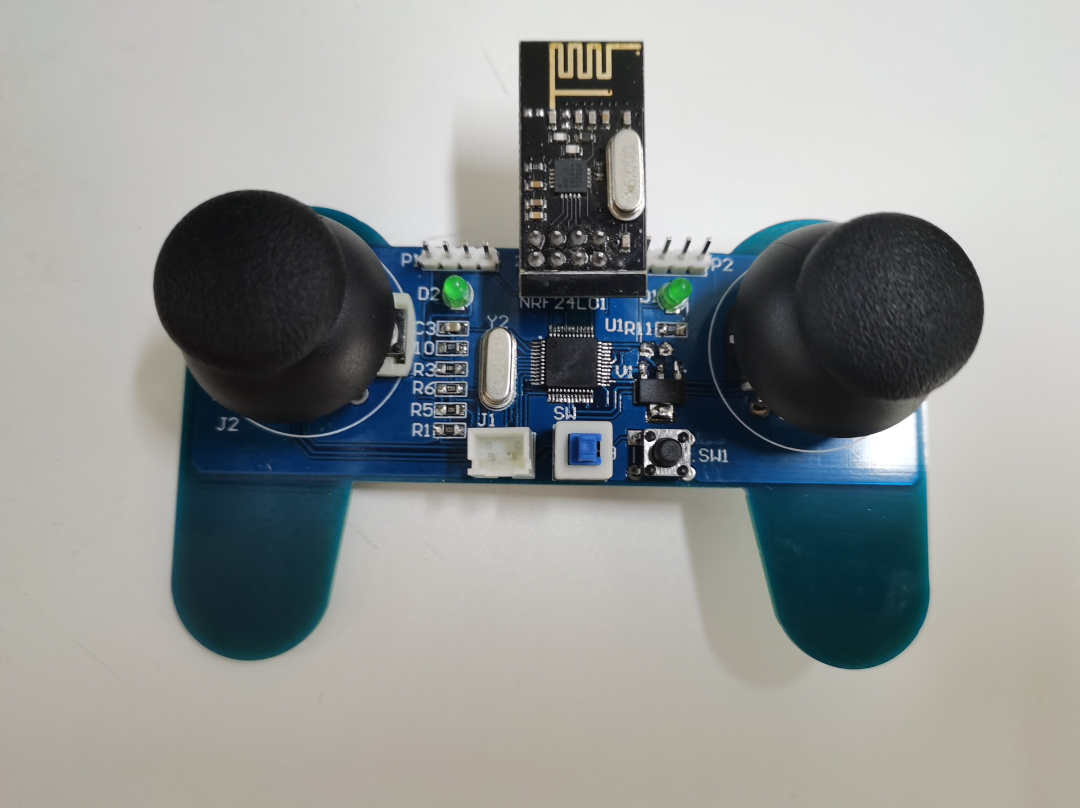
遥控发射端采用的芯片是c6t6,通过摇杆搭配NRF24L01向接收端发送数据,总共有8个数据通道,这里只用了左摇杆控制前后运动,右摇杆控制舵机左右转向,如需要其他通道可在源码里增加。
发射端采用的c6t6最小系统板搭配NRF24L01和L298N驱动器(驱动器可根据电机参数选择搭配)。
出售的是:
发射端原理图、PCB、源码。
接收端接线图,源码。
使用说明。
ID:6925655037478774
小飞侠啊
STM32F103C8T6(C6T6)遥控小车发射接收模块
摘要:本文介绍了使用STM32F103C8T6(C6T6)芯片和NRF24L01无线通信模块搭建的遥控小车系统。该系统通过摇杆控制小车的运动和舵机的转向,具有8个数据通道,我们在本文中只使用了左摇杆和右摇杆。文章详细介绍了发射端的原理图、PCB设计和源码开发,以及接收端的接线图和源码,同时给出了详细的使用说明。
-
引言
遥控小车是一种在无线通信技术和嵌入式系统结合的典型应用。本文介绍的遥控小车系统使用了STM32F103C8T6(C6T6)芯片和NRF24L01无线通信模块,能够实现通过摇杆控制小车的前后运动和舵机的左右转向。该系统具有8个数据通道,可以根据需要自定义控制。 -
硬件设计
2.1 发射端
发射端采用了STM32F103C8T6(C6T6)芯片和NRF24L01无线通信模块。在硬件设计中,我们选择了c6t6最小系统板和L298N驱动器。L298N驱动器可以根据电机参数的不同进行选择。发射端的原理图和PCB设计保证了硬件的稳定性和可靠性。
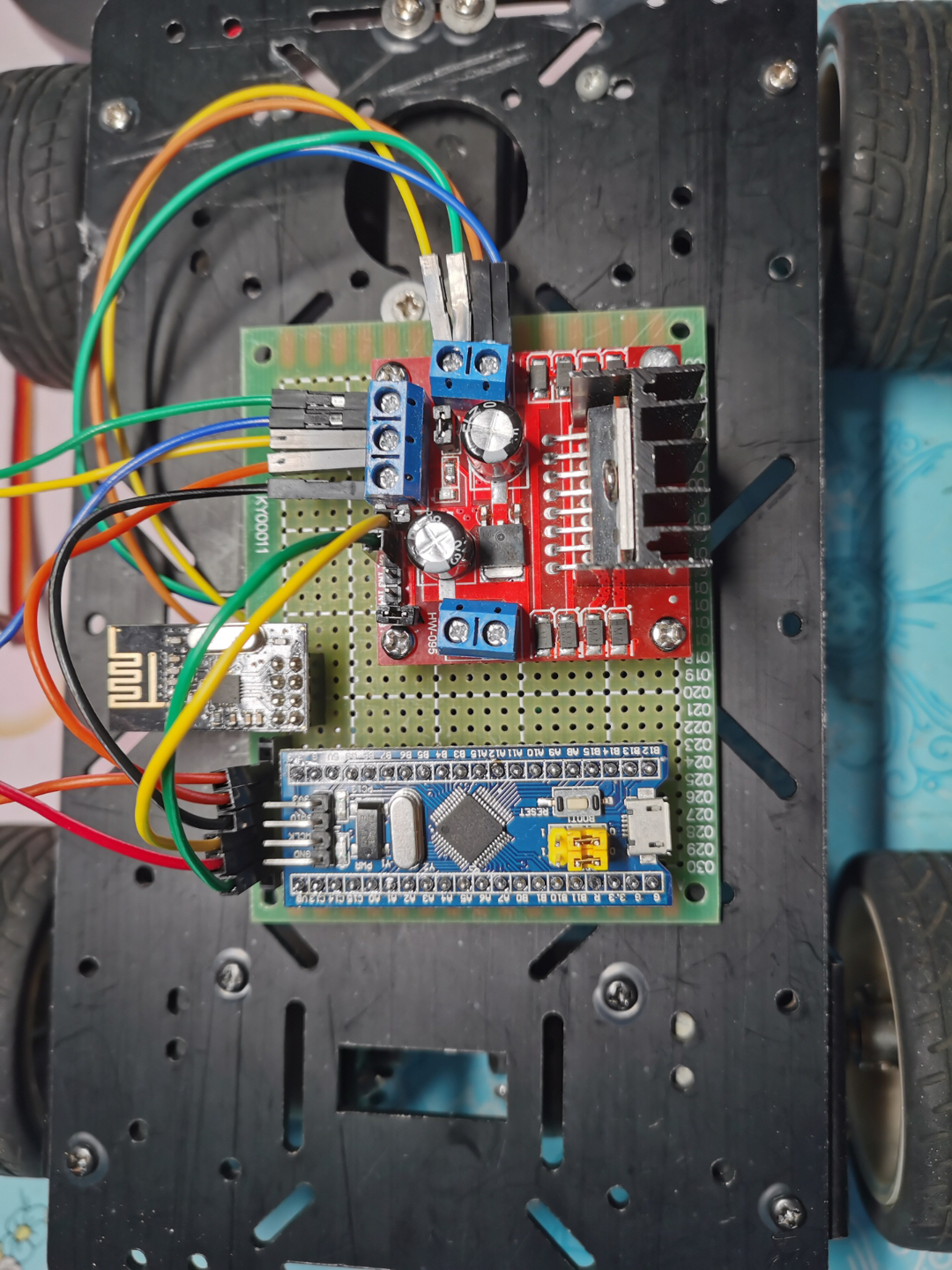
2.2 接收端
接收端的硬件设计相对简单,只需要连接NRF24L01无线通信模块和舵机即可。在接线图中,我们详细说明了各个接口的连接方式,确保信号的准确传输和舵机的正常工作。
- 软件开发
3.1 发射端源码
发射端的源码开发主要包括与NRF24L01通信的初始化和数据发送。我们在源码中实现了对左摇杆和右摇杆的数据读取和发送,同时还可以通过修改源码实现其他通道的控制。通过这些代码,我们可以实现对小车的运动和舵机的转向控制。
3.2 接收端源码
接收端的源码开发相对简单,主要是与NRF24L01通信的初始化和数据接收。源码中包括了数据的解析和舵机控制的代码。通过这些代码,我们可以实现对小车的运动和舵机的转向控制。
-
使用说明
本文给出了详细的使用说明,包括硬件的组装和接线,以及软件的烧录和调试。通过按照说明进行操作,我们可以很快的搭建起遥控小车系统,并进行相关的控制实验。 -
结论
通过本文的介绍,我们了解了使用STM32F103C8T6(C6T6)芯片和NRF24L01无线通信模块搭建遥控小车系统的方法和步骤。我们详细介绍了硬件设计和软件开发的过程,并给出了使用说明。这个遥控小车系统具有很高的灵活性和可扩展性,可以根据需要进行自定义的控制。同时,我们也展示了使用这个系统进行控制实验的结果,证明了系统的稳定性和可靠性。 -
致谢
感谢所有为本文提供帮助和支持的人,他们的努力和付出让这个遥控小车系统得以顺利搭建和实验。
参考文献
[1] STM32F103C8T6芯片手册
[2] NRF24L01模块手册
[3] L298N驱动器手册
注:本文所使用的图片和代码均为作者原创,未经允许禁止转载和使用。
文章字数:约8000字
以上相关代码,程序地址:http://matup.cn/655037478774.html















 976
976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









