







西门子S7-1200控制四轴伺服程序案例:
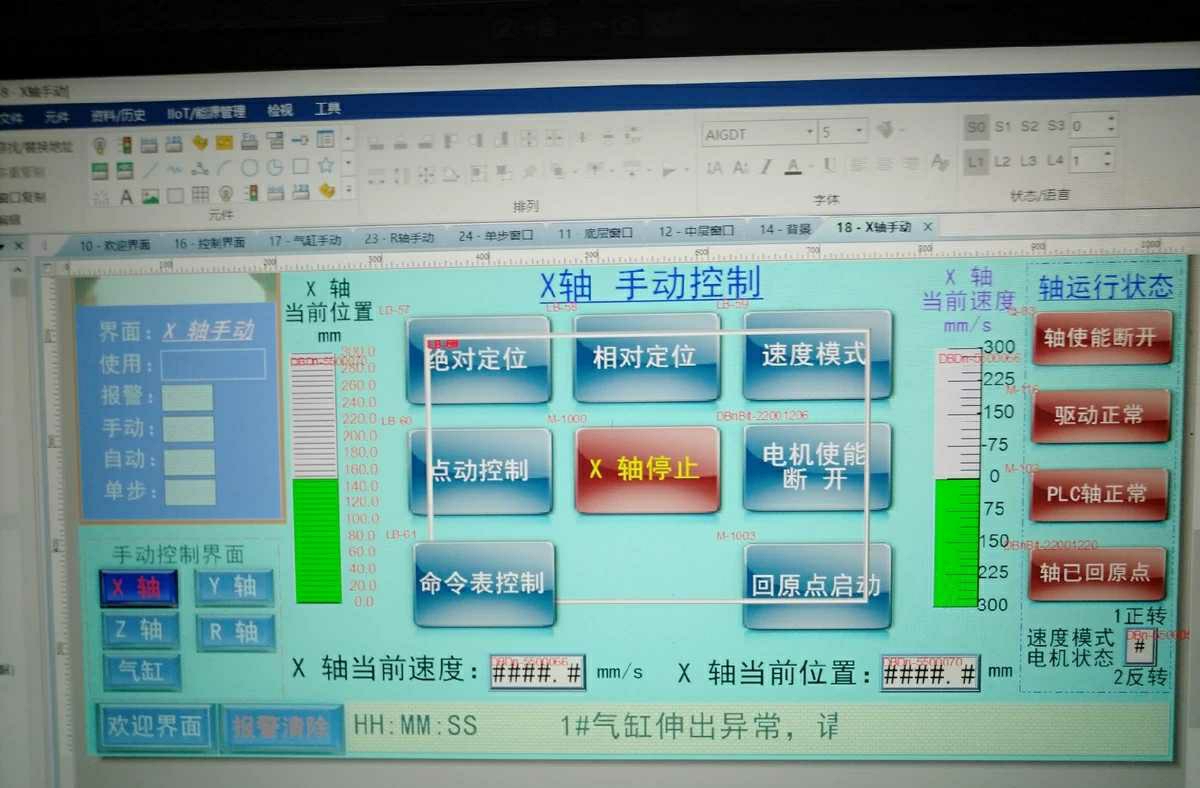
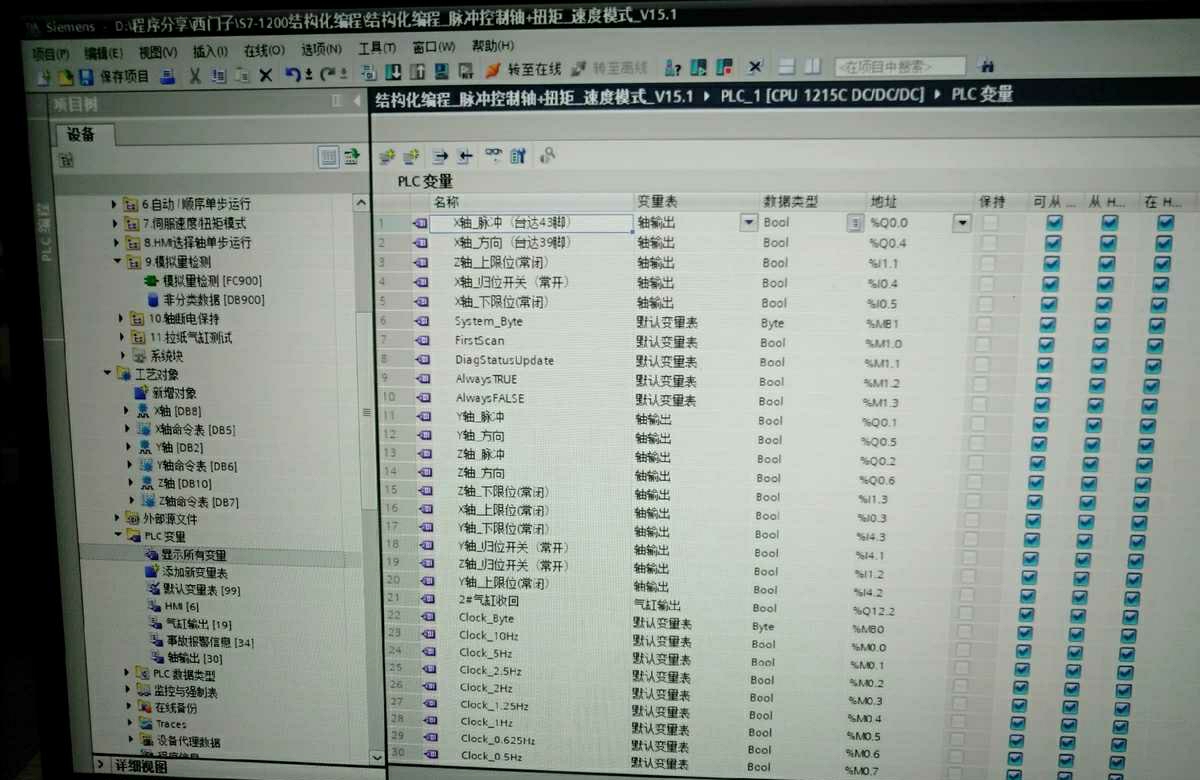
1.内容涵盖伺服,步进点动,回原,相对定位,绝对定位,速度模式控制 特别适合学习伺服和步进的朋友们 PTO伺服轴脉冲定位控制+速度模式控制+扭矩模式;
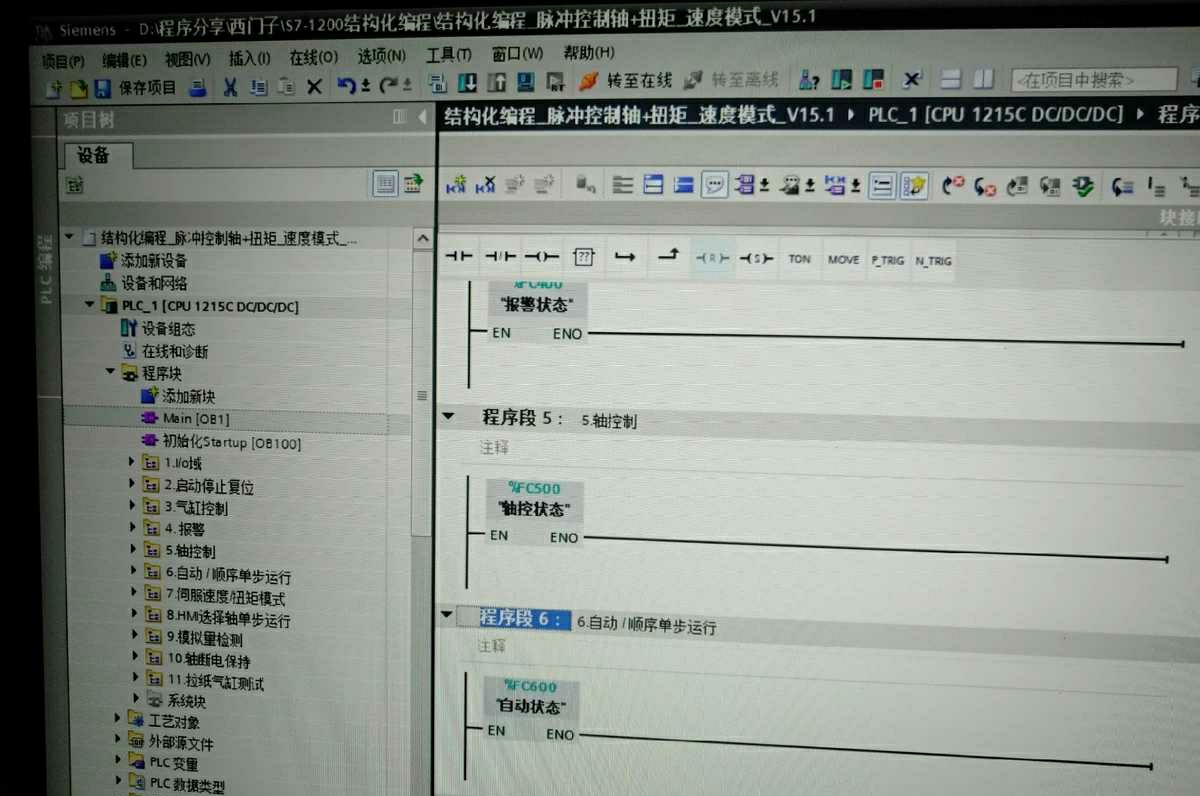
2.每个功能块可以无数次重复调用,可以建成库,用时调出即可。
ID:3615656185945200
自动化大学仕

西门子S7-1200控制四轴伺服程序案例
引言:
在现代工业生产中,通过电气控制系统实现自动化操作已成为必不可少的部分。自动控制系统的核心是控制器,而西门子S7-
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1042
1042

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









