






永磁同步电机(PMSM)基于高阶滑模观测器(HSMO)的无位置传感器速度控制仿真。
YID:39100670225519392
电机大佬


永磁同步电机(PMSM)作为一种高效、高性能的电机,广泛应用于各种领域。然而,由于PMSM的控制系统需要获取电机转子位置信息,传统上需要使用位置传感器来实现,增加了系统的复杂性和成本。为了解决这个问题,研究人员提出了一种基于高阶滑模观测器(HSMO)的无位置传感器速度控制方法,旨在降低系统成本和简化系统结构。
在传统的PMSM控制系统中,位置传感器被用来准确测量电机转子位置,以便实现闭环控制。然而,位置传感器的使用会增加系统的成本,并且在恶劣环境下可能受到干扰或损坏。因此,研究人员开始探索无位置传感器的控制方法,以提高系统的可靠性和稳定性。
高阶滑模观测器(HSMO)是一种基于滑模控制理论的观测器设计方法,通过建立一个滑模面对电机状态进行观测和估计。与传统的滑模观测器相比,高阶滑模观测器具有更快的响应速度和更高的观测精度,能够更准确地估计电机转子位置。
在无位置传感器速度控制方法中,高阶滑模观测器被用来估计电机转子位置,并作为反馈信号输入到控制器中。控制器根据估计的位置信息计算电机转子位置误差,并通过调节电机的转矩来实现速度控制。通过这种方式,无需使用实际的位置传感器,即可实现对PMSM的精确控制。
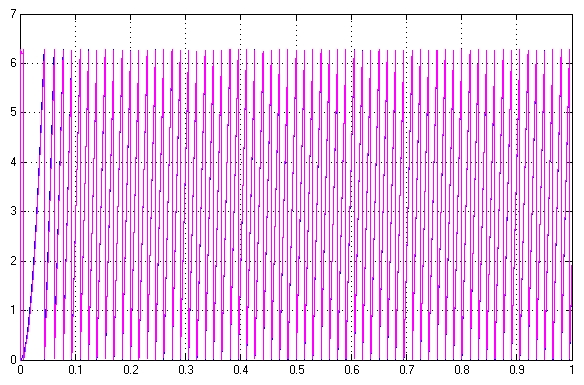
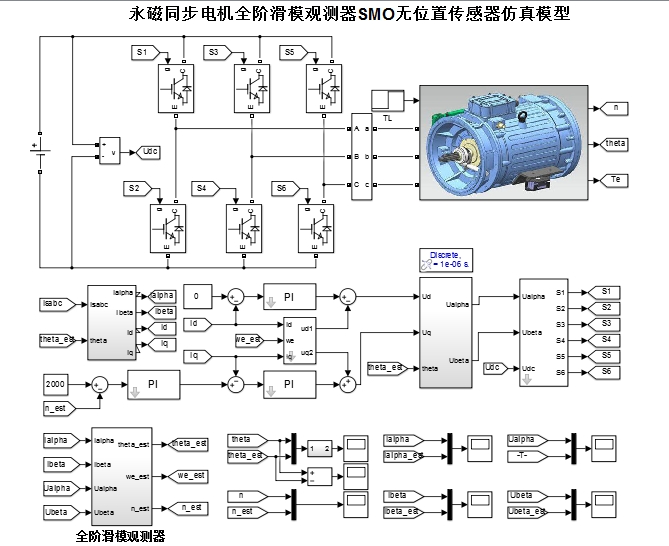
为了验证高阶滑模观测器在无位置传感器速度控制中的有效性,进行了仿真实验。首先,建立了PMSM的数学模型,包括电机的动态特性和电流方程。然后,通过采用高阶滑模观测器对电机转子位置进行估计,并根据估计的位置信息进行速度控制。最后,通过仿真实验分析,得出了高阶滑模观测器在无位置传感器速度控制中的优越性,验证了该方法的有效性和可靠性。
综上所述,基于高阶滑模观测器的无位置传感器速度控制方法为PMSM的控制系统提供了一种简化和降低成本的解决方案。通过使用高阶滑模观测器来估计电机转子位置,无需使用实际的位置传感器即可实现精确的速度控制。这种方法在提高系统可靠性和稳定性的同时,也降低了系统的成本,具有广泛的应用前景。未来的研究可以进一步优化算法,提高估计精度,并在实际系统中进行验证和应用。
以上相关代码,程序地址:http://coupd.cn/670225519392.html















 467
467











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









