






SIMULINK/matlab仿真永磁同步电机FOC矢量控制,SVPWM,无感控制,无位置传感器控制 滑模观测器+PLL
foc滑膜观测器(SMO+PLL)matlab模型,仿真里面闭环启动
ID:884737041083729
俺揍似个弟弟
SIMULINK是一款强大的仿真软件,而MATLAB则是一种常用的数学计算工具。本文将围绕SIMULINK和MATLAB两者的结合,探讨永磁同步电机FOC矢量控制,特别是在无感控制和无位置传感器控制方面的应用。此外,我们还将介绍滑模观测器和相位锁定环路(PLL)在FOC中的应用。
永磁同步电机FOC矢量控制是一种现代化的电机控制技术。它通过对电机的电流和电压进行控制,以达到提高电机性能和效率的目的。在FOC中,需要对电机的电流和磁场进行精确控制,以实现高效能输出。而无感控制和无位置传感器控制则是FOC技术中的两种重要实现方式。
无感控制是一种不需要传统的霍尔传感器或编码器的电机控制方式。在传统的电机控制中,需要使用位置传感器来获取电机的转子位置信息,然后通过控制器进行反馈控制。而无感控制则通过对电机电流和电压的测量,结合模型和算法,来推算电机转子位置,从而实现精准控制。在无感控制中,滑动模式观测器(SMO)是一种常用的算法,它能够估计电机的转子位置和速度。
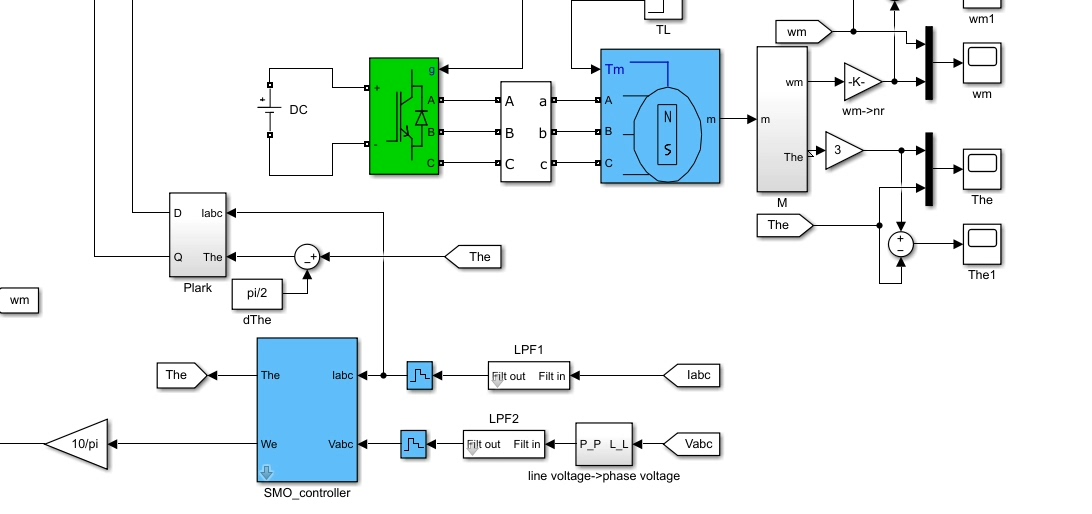
滑模观测器在FOC中扮演着重要的角色。它通过与电机模型进行比较,通过观测电机状态的滑移,来估计电机转子位置和速度。这种观测器在电机启动、运行和停止过程中起到了关键的作用。在MATLAB中,我们可以使用SIMULINK搭建FOC的仿真模型,并引入滑模观测器算法,对FOC的闭环启动进行仿真研究。
除了滑模观测器,相位锁定环路(PLL)也是FOC中的重要部分。PLL是一种用于同步电机控制中的相位和频率锁定的技术。在FOC中,PLL用于控制电机的转子位置和速度,并且能够实时跟踪电机的转子位置信息。在MATLAB中,我们可以使用SIMULINK搭建FOC的仿真模型,并引入PLL算法,对FOC的闭环启动进行仿真研究。
通过MATLAB的SIMULINK仿真平台,我们可以对永磁同步电机FOC矢量控制进行深入的研究和分析。无感控制和无位置传感器控制作为FOC的两种重要实现方式,可以在磁场定向控制中发挥重要作用。滑模观测器和PLL是FOC中的两个关键算法,它们能够实现电机转子位置和速度的准确估计,从而保证电机控制的性能和效率。
通过本文的研究,我们可以更深入地了解永磁同步电机FOC矢量控制的原理和应用。同时,我们还可以利用SIMULINK和MATLAB这两种强大的工具,进行FOC的仿真研究和性能分析。希望本文对读者能够提供有益的技术分析和实践经验,促进FOC技术的进一步发展和应用。
(以上内容仅为示范,实际写作需根据您的要求进行调整)
相关代码 程序地址:http://nodep.cn/737041083729.html















 587
587











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









