







文章目录
一、概述
1.基本术语
- G = (V; E)
- vertex: n = |V|
- edge|arc: e = |E|
-
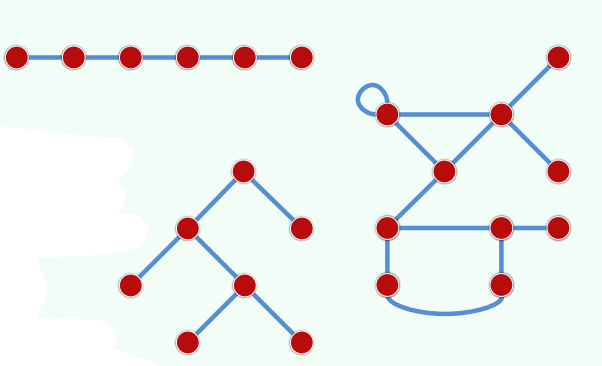
- 同一条边的两个顶点,彼此邻接(adjacency)
- 同一顶点自我邻接,构成自环(self-loop)
- 不含自环及重边,即为简单图(simple graph)
- 非简单(non-simple)图,暂不讨论
-
顶点与其所属的边,彼此关联(incidence)
-
度(degree/valency):与同一顶点关联的边数
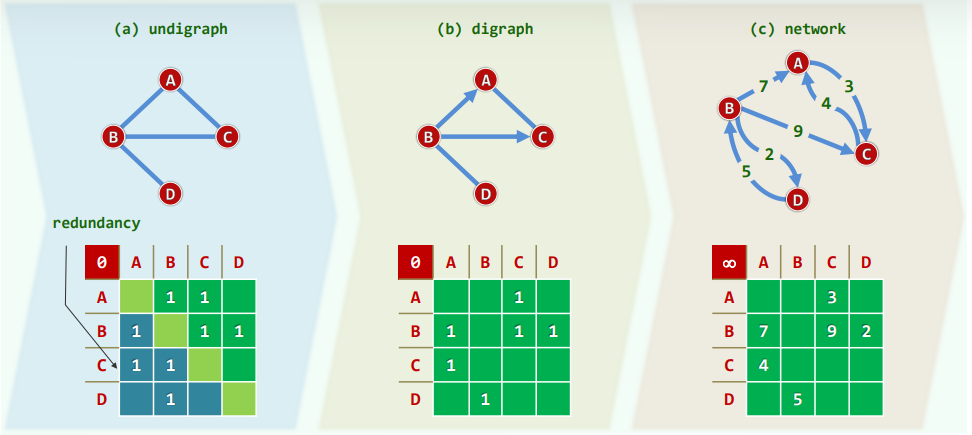
2.无向图 + 有向图
-
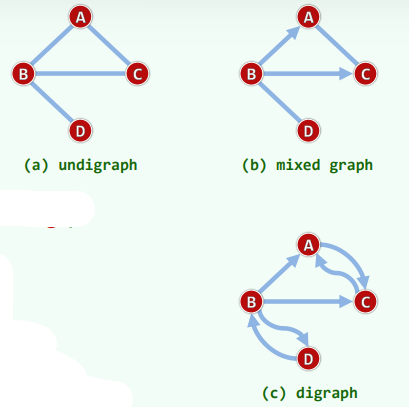
若邻接顶点u和v的次序无所谓 则(u, v)为无向边(undirected edge)
-
所有边均无方向的图,即无向图(undigraph)
-
反之,有向图(digraph)中均为有向边(directed edge) u、v分别称作边(u, v)的尾(tail)、头(head)
-
无向边、有向边并存的图,称作混合图(mixed graph)
3.路径 + 环路
-
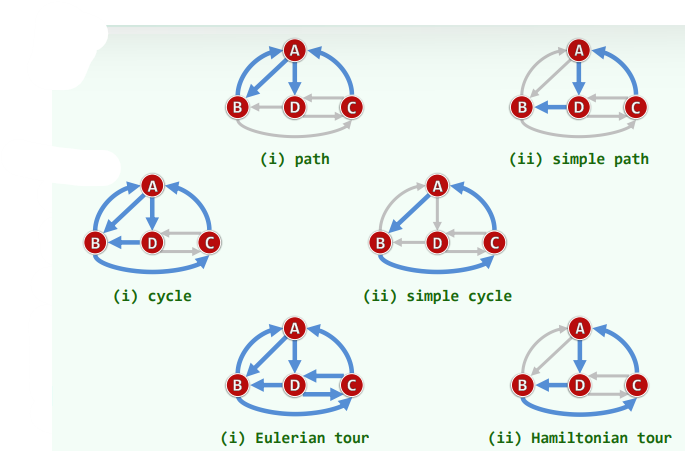
路径$π=<v_0,v_1,…,v_k> ,长度|π| = k $
-
简单路径: v i ≠ v j v_i ≠ v_j vi=vj 除非 i = j
-
环/环路: v 0 = v k v_0 = v_k v0=vk
-
有向无环图(DAG)
-
欧拉环路:$|π| = |E| $,各边恰好出现一次
-
哈密尔顿环路:$|π| = |V| $,各顶点恰好出现一次
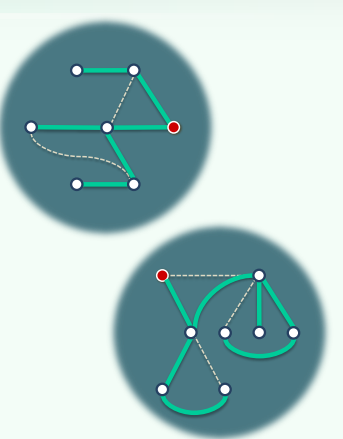
4.支撑树 + 带权网络 + 最小支撑树
-
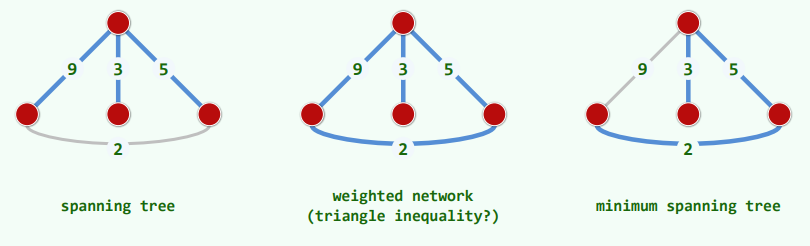
图G = (V; E)的子图T = (V; F)若是树,即为其支撑树(spanning tree) 同一图的支撑树,通常并不唯一
-
各边e均有对应的权值wt(e),则为带权网络(weighted network)
-
同一网络的支撑树中,总权重最小者为最小支撑树(MST)
二、邻接矩阵
1.构思
1.1 Graph 模板类
template<typename Tv,typename Te> class Graph {
private:
void reset() { //所有顶点、边的辅助信息复位
for ( Rank v = 0; v < n; v++ ) { //顶点
status(v) = UNDISCOVERED;
dTime(v) = fTime(v) = -1;
parent(v) = -1;
priority(v) = INT_MAX;
for ( Rank u = 0; u < n; u++ ) //边
if ( exists(v, u) ) type(v, u) = UNDETERMINED;
}
}
public:
int n, e; //顶点、边数目
/* ... 顶点操作、边操作、图算法:无论如何实现,接口必须统一 ... */
}
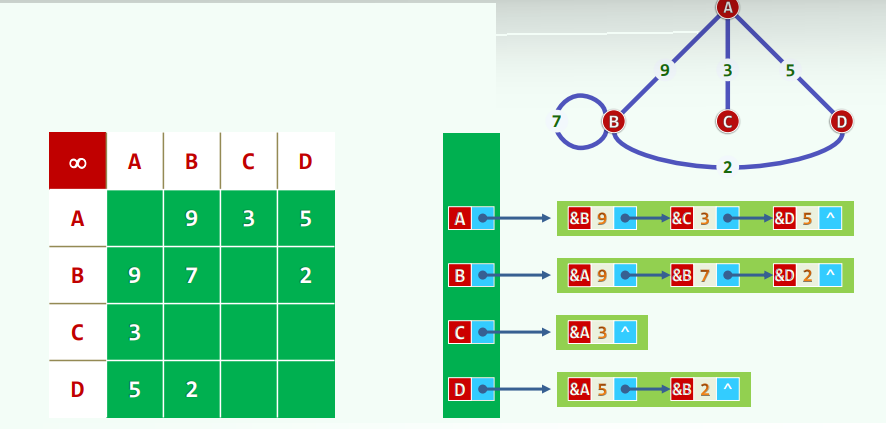
1.2 邻接矩阵 + 关联矩阵
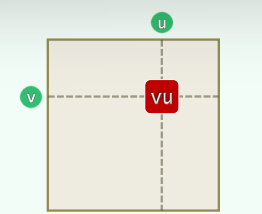
- 邻接矩阵(adjacency matrix):记录顶点之间的邻接关系
-
一一对应:矩阵元素 ⇔ 图中可能存在的边
-
A(v, u) = 1 (若顶点v与u之间存在一条边)/= 0 (否则)
-
既然只考察简单图,对角线统一设置为0
-
空间复杂度为(n2),与图中实际的边数无关
-
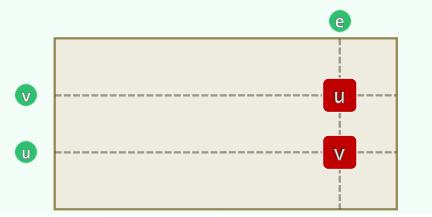
- 关联矩阵(incidence matrix):记录顶点与边之间的关联关系
-
空间复杂度为 Θ ( n ∗ e ) = O ( n 3 ) Θ(n*e) = O(n^3) Θ(n∗e)=O(n3)
-
空间利用率 = 2e/ne = 2/n
-
解决某些问题时十分有效
-
1.3 实例
2.模板实现
//Vertex
using VStatus = enum { UNDISCOVERED, DISCOVERED, VISITED };
template<typename Tv> struct Vertex { //不再严格封装
Tv data; int inDegree, outDegree;
VStatus status; //(如上三种)状态
int dTime, fTime; //时间标签
Rank parent; //在遍历树中的父节点
int priority; //在遍历树中的优先级(最短通路、极短跨边等)
Vertex( Tv const & d ) : //构造新顶点
data( d ), inDegree( 0 ), outDegree( 0 ), status( UNDISCOVERED ),
dTime( -1 ), fTime( -1 ), parent( -1 ), priority( INT_MAX ) {}
}
//Edge
using EType = enum { UNDETERMINED, TREE, CROSS, FORWARD, BACKWARD };
template<typename Te> struct Edge { //不再严格封装
Te data; //数据
int weight; //权重
EType type; //在遍历树中所属的类型
Edge( Te const & d, int w ) : //构造新边
data(d), weight(w), type(UNDETERMINED) {}
};
//GraphMatrix
template<typename Tv,typename Te> class GraphMatrix : public Graph {
private:
Vector< Vertex > V; //顶点集
Vector< Vector< Edge* > > E; //边集
public: // 操作接口:顶点相关、边相关、...
GraphMatrix() { n = e = 0; }
~GraphMatrix() {
for ( Rank v = 0; v < n; v++ )
for ( Rank u = 0; u < n; u++ )
delete E[v][u]; //清除所有边记录
}
}
3.静态操作
3.1 顶点的读写

Tv & vertex(Rank v) { return V[v].data; } //数据
int inDegree(Rank v) { return V[v].inDegree; } //入度
int outDegree(Rank v) { return V[v].outDegree; } //出度
VStatus & status(Rank v) { return V[v].status; } //状态
int & dTime(Rank v) { return V[v].dTime; } //时间标签dTime
int & fTime(Rank v) { return V[v].fTime; } //时间标签fTime
Rank & parent(Rank v) { return V[v].parent; } //在遍历树中的父亲
int & priority(Rank v) { return V[v].priority; } //优先级数
3.2 边的读写
bool exists( Rank v, Rank u ) { //判断边(v, u)是否存在(短路求值)
return (v < n) && (u < n) && E[v][u] != NULL;
} //以下假定exists(v, u) = true
Te & edge( Rank v, Rank u ) { return E[v][u]->data; } //数值
EType & type( Rank v, Rank u ) { return E[v][u]->type; } //类型
int & weight( Rank v, Rank u ) { return E[v][u]->weight; } //权重
3.3 邻点的枚举
Rank firstNbr( Rank v ) { return nextNbr( v, n ); } //假想哨兵
Rank nextNbr( Rank v, Rank u ) { //若已枚举至邻居u,则转向下一邻居
while ( -1 < u ) && ! exists( v, --u ) ); //逆向顺序查找
return u;
} //O(n)——改用邻接表,可提高至O(1 + outDegree(v))
4.动态操作
4.1 边的插入
void insert( Te const & edge, int w, Rank v, Rank u ) {
if ( exists(v, u) ) return; //忽略已有的边
E[v][u] = new Edge( edge, w ); //创建新边(权重为w)
e++; //更新边计数
V[v].outDegree++; //更新顶点v的出度
V[u].inDegree++; //更新顶点u的入度
}
4.2 边的删除
Te remove( Rank v, Rank u ) { //删除(已确认存在的)边(v, u)
Te eBak = edge(v, u); //备份边(v, u)的信息
delete E[v][u]; E[v][u] = NULL; //删除边(v, u)
e--; //更新边计数
V[v].outDegree--; //更新顶点v的出度
V[u].inDegree--; //更新顶点u的入度
return eBak; //返回被删除边的信息
}
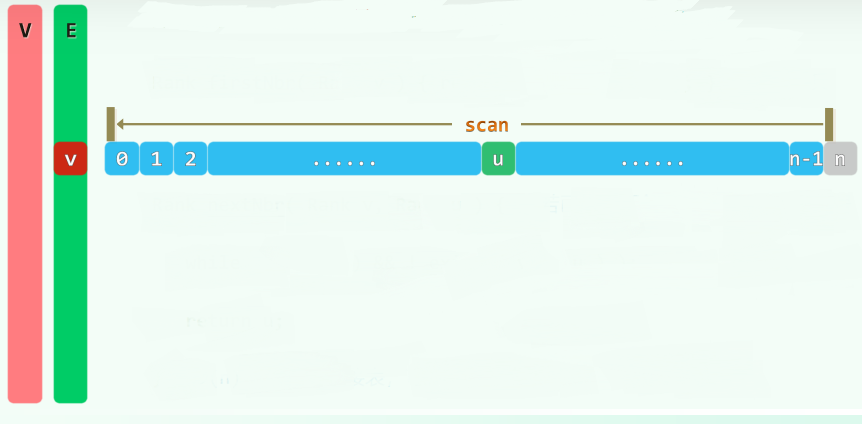
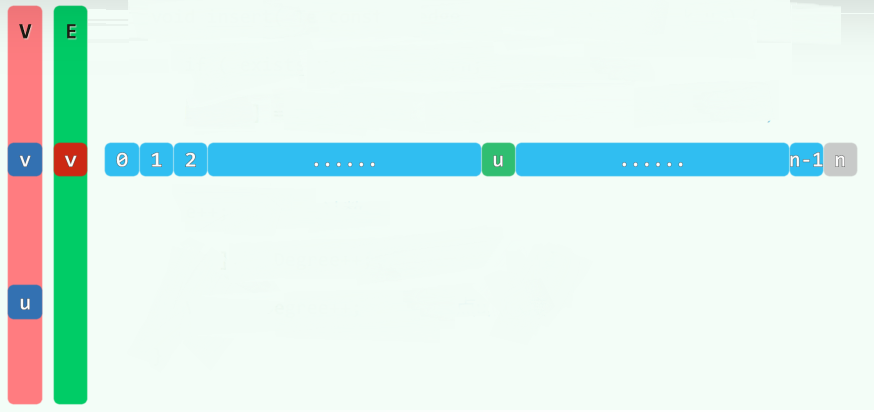
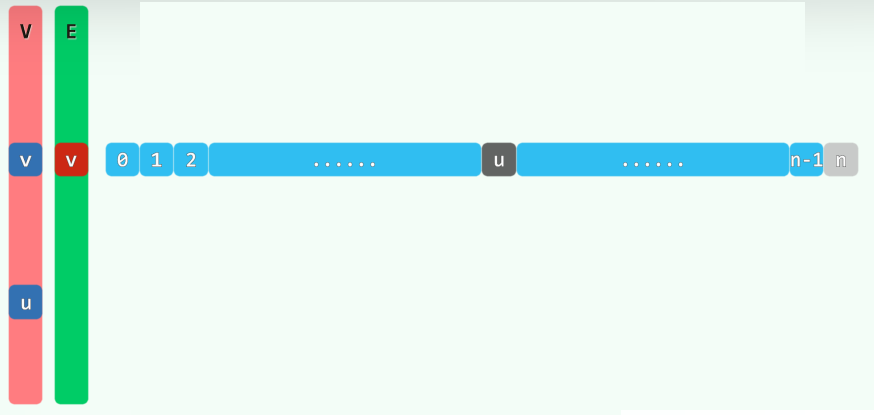
4.3 顶点插入
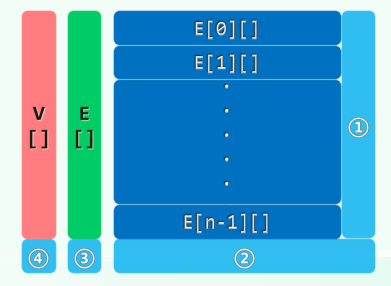
Rank insert( Tv const & vertex ) { //插入顶点,返回编号
for ( Rank u = 0; u < n; u++ ) E[u].insert( NULL ); n++; //①
E.insert( Vector< Edge* >( n, n, NULL ) ); //②③
return V.insert( Vertex( vertex ) ); //④
}
4.4 顶点删除
Tv remove( Rank v ) { //删除顶点及其关联边,返回该顶点信息
for ( Rank u = 0; u < n; u++ ) //删除所有出边
if ( exists( v, u ) ) { delete E[v][u]; V[u].inDegree--; e-- }
E.remove(v); n--; //删除第v行
Tv vBak = vertex( v ); V.remove( v ); //备份之后,删除顶点v
for ( Rank u = 0; u < n; u++ ) //删除所有入边及第v列
if ( Edge * x = E[u].remove( v ) ) { delete x; V[u].outDegree--; e--; }
return vBak; //返回被删除顶点的信息
}
5.性能分析
5.1 优点
-
直观,易于理解和实现
-
适用范围广泛 尤其适用于稠密图(dense graph)
-
判断两点之间是否存在联边:O(1)
-
获取顶点的(出/入)度数:O(1)
-
添加、删除边后更新度数:O(1)
-
扩展性(scalability):得益于Vector良好的控制策略,空间溢出等情况可被“透明地”处理
5.2 缺点
-
Θ ( n 2 ) Θ(n^2) Θ(n2)空间,与边数无关!
-
平面图(planar graph):可嵌入于平面的图
-
欧拉公式(Euler’s formula): v - e + f - c = 1, for any PG
-
平面图:e ≤ 3n - 6 = O(n) << n 2 n^2 n2,此时空间利用率 ≈ 1/n
-
稀疏图(sparse graph):空间利用率同样很低,可采用压缩存储技术
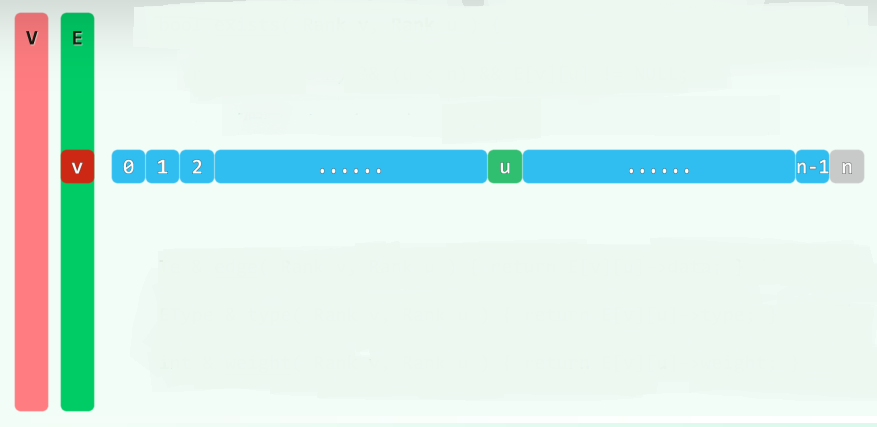
三、邻接表
1.邻接表
- 如何避免邻接矩阵的空间浪费?
- 将邻接矩阵的各行组织为列表,只记录存在的边,等效于,每一顶点v对应于列表: L v = L_v= Lv={u | <v,u> ∈E }
2.复杂度
2.1 空间复杂度
-
有向图 = O(n + e)
-
无向图 = O(n + 2e) = O(n + e)
- 注意:无向弧被重复存储
-
适用于稀疏图
-
平面图 = O(n + 3n) = O(n) 较之邻接矩阵,有极大改
2.2 时间复杂度
-
建立邻接表(递增式构造):O( n + e )
-
枚举所有以顶点v为尾的弧:O( 1 + deg(v) ) //遍历v的邻接表
-
枚举(无向图中)顶点v的邻居:O( 1 + deg(v) ) //遍历v的邻接表
-
枚举所有以顶点v为头的弧:O( n + e ) //遍历所有邻接表
- 可改进至O( 1 + deg(v) ) //建立逆邻接表
-
计算顶点v的出度/入度:
-
增加度数记录域:O( n )附加空间
-
增加/删除弧时更新度数:O( 1 )时间 //总体O(e)时间
-
每次查询:O(1)时间!
-
3.取舍原则
| 邻接矩阵 | 邻接表 | |
|---|---|---|
| 适 用 场 合 | 经常检测边的存在,经常做边的插入/删除,图的规模固定,稠密图 | 经常计算顶点的度数,顶点数目不确定,经常做遍历,稀疏图 |
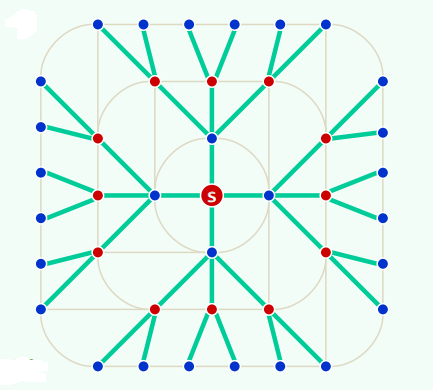
四、广度优先算法
1.算法
始自顶点s的广度优先搜索
访问顶点s
依次访问s所有尚未访问的邻接顶点
依次访问它们尚未访问的邻接顶点
...
如此反复
直至没有尚未访问的邻接顶点
- 以上策略及过程完全等同于树的层次遍历 ,事实上,BFS也的确会构造出原图的一棵支撑树(BFS tree)

template<typename Tv,typename Te>
void Graph::BFS( Rank v, int & clock ) {
Queue Q; status(v) = DISCOVERED; Q.enqueue(v); //初始化
while ( ! Q.empty() ) {
Rank v = Q.dequeue(); dTime(v) = ++clock; //取出队首顶点v,并
for ( Rank u = firstNbr(v); -1 < u; u = nextNbr(v, u) ) //考查每一邻居u
if ( UNDISCOVERED == status(u) ) { //若u尚未被发现,则
status(u) = DISCOVERED; Q.enqueue(u); //发现该顶点
type(v, u) = TREE; parent(u) = v; //引入树边
} else //若u已被发现(正在队列中),或者甚至已访问完毕(已出队列),则
type(v, u) = CROSS; //将(v, u)归类于跨边
tatus(v) = VISITED; //至此,当前顶点访问完毕
}
}
2.实例
3.推广
3.1 连通分量 + 可达分量
-
问题
- 给定无向图,找出其中任一顶点s所在的连通图
- 给定有向图,找出源自其中任一顶点s的可达分量
-
算法
- 从s出发做BFS
- 输出所有被发现的顶点
- 队列为空后立即终止,无需考虑其它顶点
3.2 Graph::bfs()
template<typename Tv,typename Te>
void Graph::bfs( Rank s ) { //s为起始顶点
reset(); int clock = 0; Rank v = s; //初始化Θ(n+e)
do //逐一检查所有顶点,一旦遇到尚未发现的顶点
if ( UNDISCOVERED == status(v) ) //累计Θ(n)
BFS( v, clock ); //即从该顶点出发启动一次BFS
while ( s != ( v = ( ( v+1 ) % n ) ) ); //按序号访问,不漏不重
} //无论共有多少连通/可达分量...
3.3 复杂度
-
bfs()的初始化(reset()):O(n+e)
-
BFS()的迭代
- 外循环(while ( !Q.empty() )),每个顶点各进入1次
- 内循环(枚举v的每一邻居): O(1+deg(v))(改用邻接表)
- 总共: O ( ∑ v ∈ V ( 1 + d e g ( v ) ) ) = O ( n + 2 e ) O(\sum_{v∈V}(1+deg(v)))=O(n+2e) O(∑v∈V(1+deg(v)))=O(n+2e)
-
整个算法:O(n+e)+O(n+2e)=O(n+e)
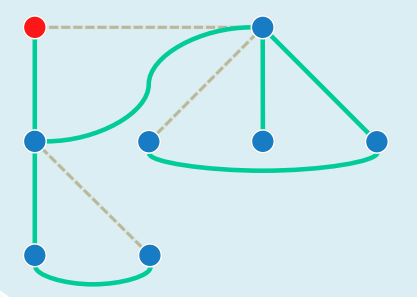
4.性质及规律
4.1 边分类
-
经BFS后,所有边将确定方向,且被分为两类
-
(v,u)被标记为TREE时,v为DISCOVERED且u为UNDISCOVERED

- (v,u)被标记为CROSS时,v和u均为DISCOVERED 或者 v为DISCOVERED而u为VISITED

- 不论(v,u)是有向边或无向边,两种情况均可能出现
4.2 BFS树/森林
-
对于(起始于v的)每一连通/可达分量,bfs()进入BFS(v)恰好1次
-
进入BFS(v)时,队列为空;v所属分量内的每个顶点
-
迟早会以UNDISCOVERED状态进队1次
-
进队后随即转为DISCOVERED状态,并生成一条树边
-
迟早会出队并转为VISITED状态
-
退出BFS(v)时,队列为空
-
-
BFS(v)以v为根,生成一棵BFS树
-
bfs()生成一个BFS森林包含 c 棵树、n-c 条树边和 e-n+c 条跨边
4.3 最短路径
-
无向图中,顶点v到u的(最近)距离记作dist(v, u)
-
BFS过程中,队列Q犹如一条贪吃蛇
-
其中的顶点按dist(s)单调排列
-
相邻顶点的dist(s)相差不超过1
-
首、末顶点的dist(s)相差不超过1
-
由树边联接的顶点,dist(s)恰好相差1
-
由跨边联接的顶点,dist(s)至多相差1
-
-
BFS树中从s到v的路径,即是二者在原图中的最短通路
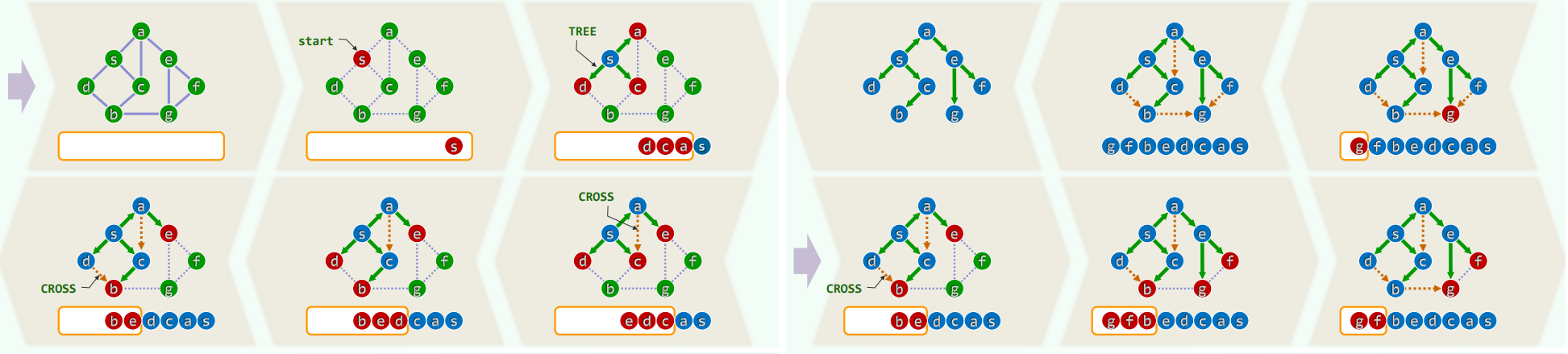
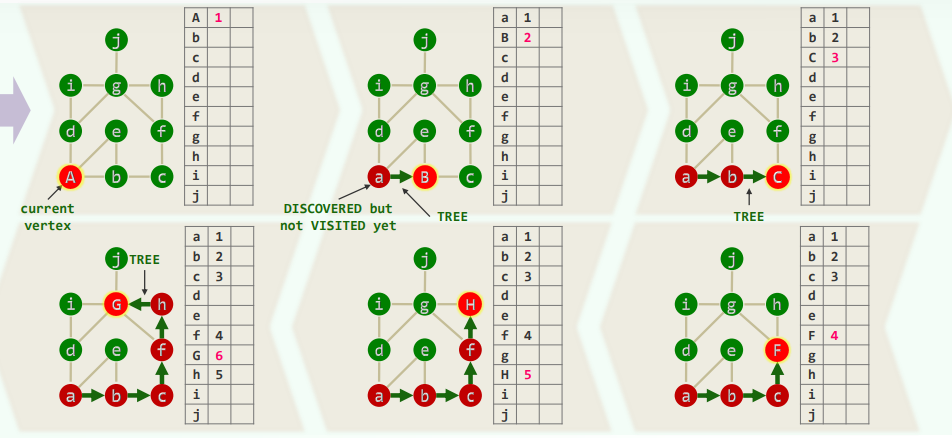
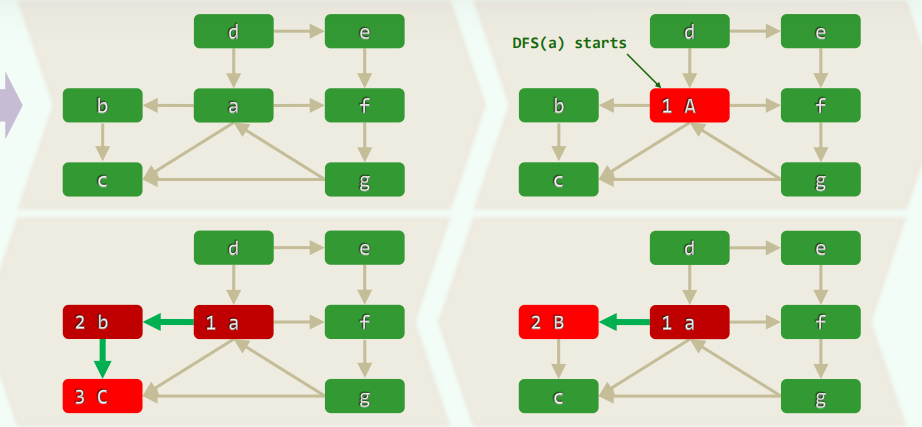
五、深度优先搜索
1.算法
DFS(s) //始自顶点s的深度优先搜索
访问顶点s
若s尚有未被访问的邻居,则 任取其一u,递归执行DFS(u)
否则,返回
若此时尚有顶点未被访问,任取这样的一个顶点作起始点
-
重复上述过程,直至所有顶点都被访问到
-
对树而言,等效于先序遍历:DFS也的确会构造出原图的一棵支撑树(DFS tree)
template<typename Tv,typename Te>
void Graph::DFS( Rank v, int & clock ) {
dTime(v) = ++clock; status(v) = DISCOVERED; //发现当前顶点v
for ( Rank u = firstNbr(v); -1 < u; u = nextNbr(v, u) ) //考察v的每一邻居u
switch ( status(u) ) { //并视其状态分别处理
case UNDISCOVERED: //u尚未发现,意味着支撑树可在此拓展
type(v, u) = TREE; parent(u) = v; DFS( u, clock ); break; //递归
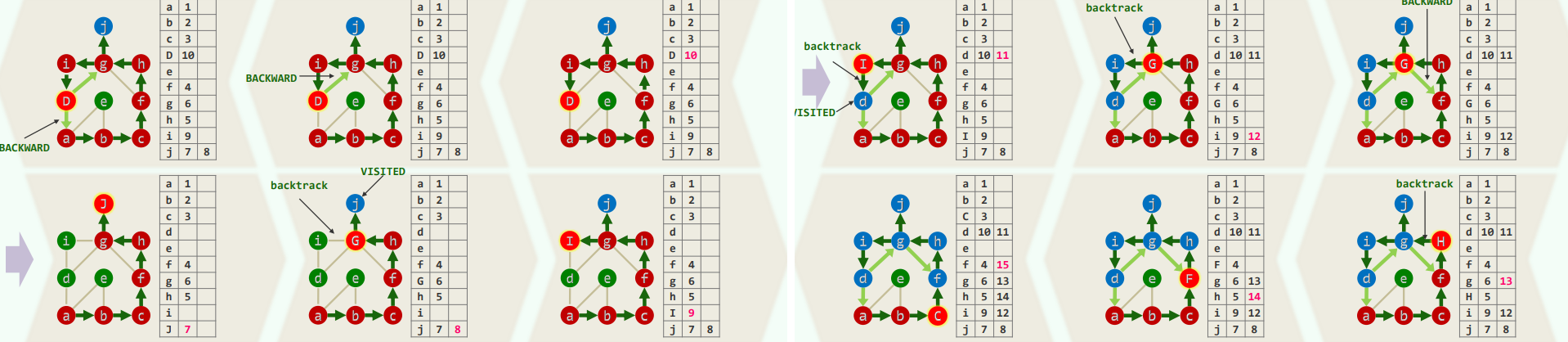
case DISCOVERED: //u已被发现但尚未访问完毕,应属被后代指向的祖先
type(v, u) = BACKWARD; break;
default: //u已访问完毕(VISITED,有向图),则视承袭关系分为前向边或跨边
type(v, u) = dTime(v) < dTime(u) ? FORWARD : CROSS; break;
}
status(v) = VISITED; fTime(v) = ++clock; //至此,当前顶点v方告访问完毕
}
2.实例(无向图)
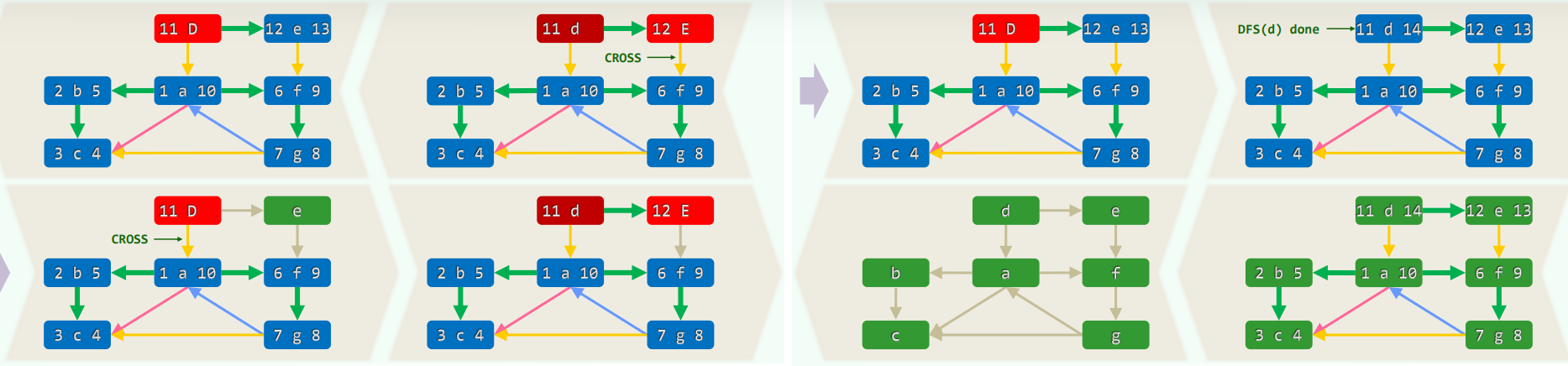
3.推广
-
与BFS(v)类似,DFS(v)也可遍历v所属分量
-
与bfs(s)类似(采用邻接表),dfs(s)也可在累计O(n+e)时间内
- 对于每一连通/可达分量,从其起始顶点v进入DFS(v)恰好1次,并最终生成一个DFS森林(包含 c 棵树、n-c 条树边)
template<typename Tv,typename Te>
void Graph::dfs( Rank s ) { //s为起始顶点
reset(); int clock = 0; Rank v = s; //初始化
do //逐一检查所有顶点,一旦遇到尚未发现的顶点v
if ( UNDISCOVERED == status(v) )
DFS( v, clock ); //即从v出发启动一次DFS
while ( s != ( v = ( ( v+1 ) % n ) ) ); //按序号访问,不漏不重
}
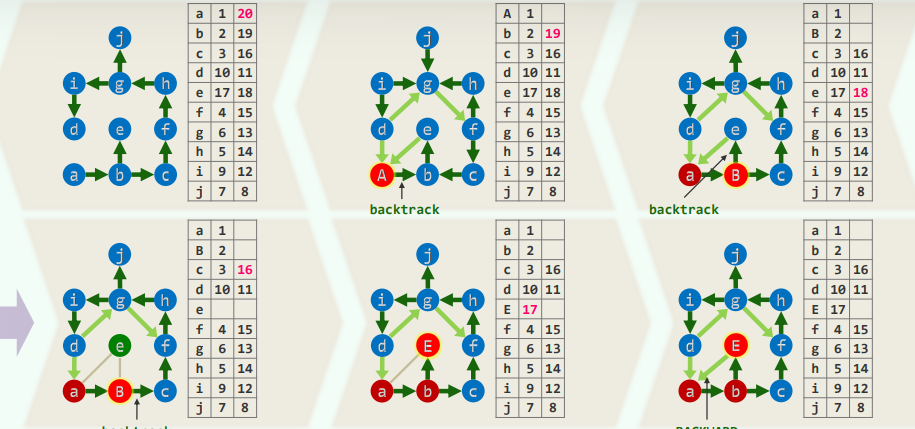
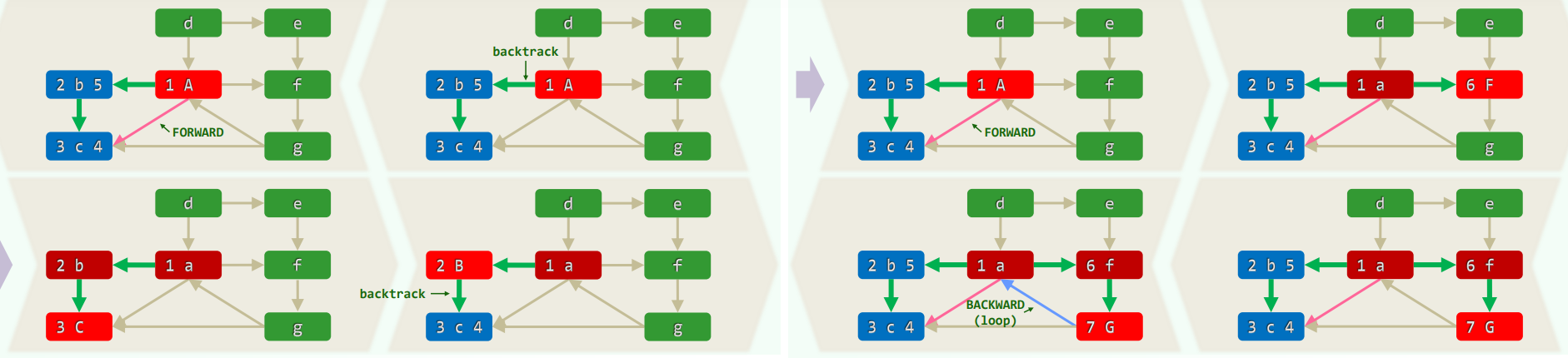
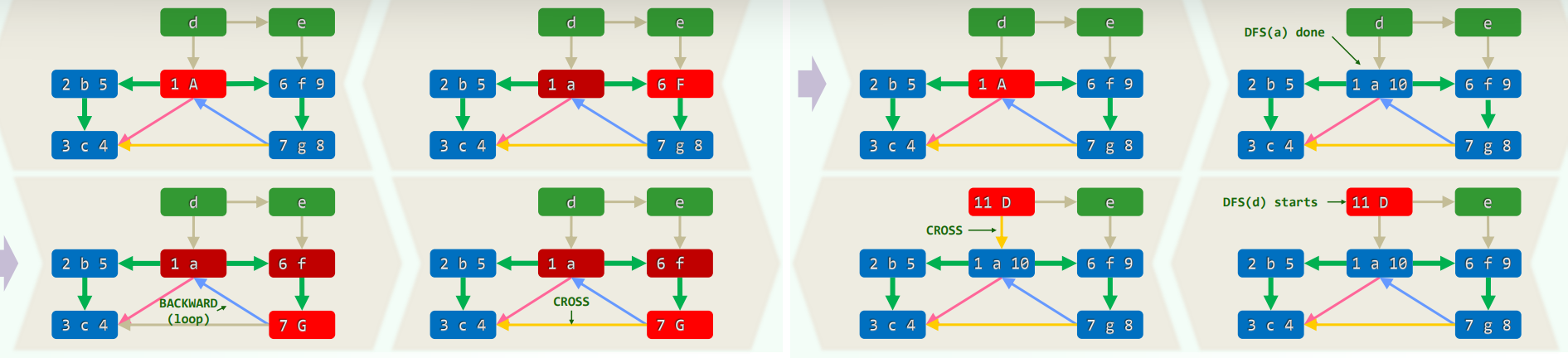
4.实例(有向图)
5.性质
5.1 DFS树/森林
-
从顶点s出发的DFS
- 在无向图中将访问与s连通的所有顶点(connectivity)
- 在有向图中将访问由s可达的所有顶点(reachability)
-
经DFS确定的树边,不会构成回路
-
从s出发的DFS,将以s为根生成一棵DFS树;所有DFS树,进而构成DFS森林
-
DFS树及森林由parent指针描述(只不过所有边取反向)
5.2 活跃期 & 括号引理
-
active[u]=(dTime[u],fTime[u])
-
括号定理(Parenthesis Lemma):给定有向图G = (V, E)及其任一DFS森林,则
- u是v的后代 iff
- u是v的祖先 iff
- u与v“无关”iff
-
仅凭status[]、dTime[]和fTime[] 即可对各边分类.
5.3 边分类
- TREE(v, u): 可从当前v进入处于UNDISCOVERED状态的u

- BACKWARD(v, u): 试图从当前v进入处于DISCOVERED状态的u,DFS发现后向边 iff 存在回路

- FORWARD(v, u): 试图从当前顶点v进入处于VISITED状态的u,且v更早被发现

- CROSS(v, u): 试图从当前顶点v进入处于VISITED状态的u,且u更早被发现

5.4 遍历算法应用举例
| 连通图的支撑树(DFS/BFS Tree) | DFS/BFS |
|---|---|
| 非连通图的支撑森林 | DFS/BFS |
| 连通性检测 | DFS/BFS |
| 无向图环路检测/二部图判定 | DFS/BFS |
| 有向图环路检测 | DFS |
| 顶点之间可达性检测/路径求解 | DFS/BFS |
| 顶点之间的最短距离 | BFS |
| 直径/半径/围长/中心 | BFS |
| 欧拉回路 | DFS |
| 拓扑排序 | DFS |
| 双连通分量、强连通分量分解 | DFS |
六、拓扑排序
1.零入度算法
1.1 有向无环图(Directed Acyclic Graph)
- 应用
- 类派生和继承关系图中,是否存在循环定义
- 操作系统中相互等待的一组线程,如何调度
- 给定一组相互依赖的课程,设计可行的培养方案
- 给定一组相互依赖的知识点,设计可行的教学进度方案
- 项目工程图中,设计可串行施工的方案
- email系统中,是否存在自动转发或回复的回路
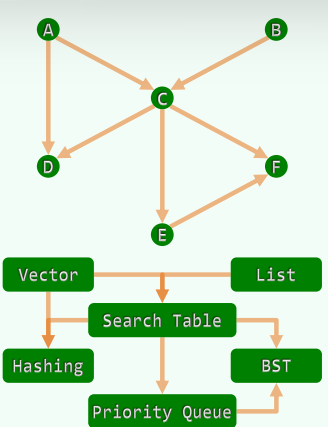
1.2 拓扑排序
- 任给有向图G(不一定是DAG),尝试 将所有顶点排成一个线性序列,使其次序须与原图相容 (每一顶点都不会通过边指向前驱顶点)
- 接口要求
- 若原图存在回路(即并非DAG),检查并报告
- 否则,给出一个相容的线性序列

1.3 偏序 ~ 极值
-
每个DAG对应于一个偏序集;拓扑排序对应于一个全序集 所谓的拓扑排序,即构造一个与指定偏序集相容的全序集
-
可以拓扑排序的有向图,必定无环
-
任何DAG,都存在(至少)一种拓扑排序
-
有限偏序集必有极值元素
1.4 存在性
-
任何有向无环图g中 必有一个零入度的顶点m
-
若g{m}存在拓扑排序S={ v k 1 , v k 2 , . . . , v k n − 1 v_{k_1},v_{k_2},...,v_{k_{n-1}} vk1,vk2,...,vkn−1},则 S ′ S' S′={ m , v k 1 , v k 2 , . . . , v k n − 1 m,v_{k_1},v_{k_2},...,v_{k_{n-1}} m,vk1,vk2,...,vkn−1}即为g的拓扑排序
-
只要m不唯一,拓扑排序也应不唯一
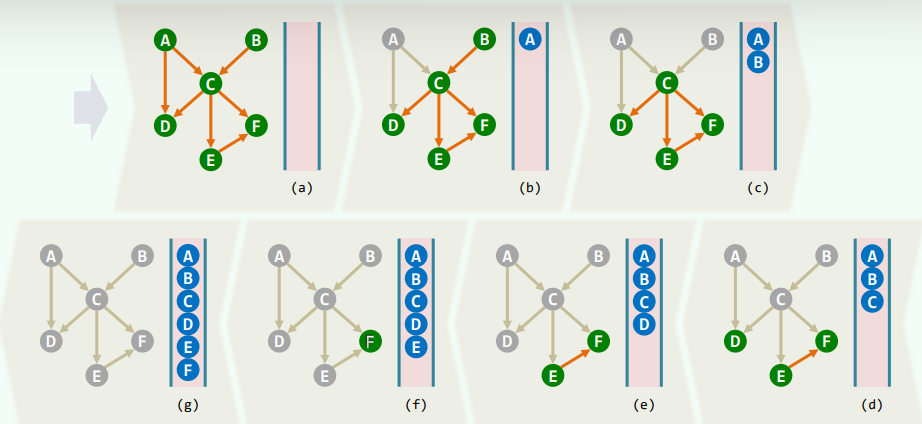
1.5 策略:顺序输出零入度顶点
将所有入度为零的顶点存入栈S,取空队列Q //O(n)
while ( ! S.empty() ) { //O(n)
Q.enqueue( v = S.pop() ); //栈顶v转入队列
for each edge( v, u ) //v的邻接顶点u若入度仅为1
if ( u.inDegree < 2 ) S.push( u ); //则入栈
G = G \ { v }; //删除v及其关联边(邻接顶点入度减1)
} //总体O(n + e)
return |G| ? "NOT_A_DAG" : Q; //残留的G空,当且仅当原图可拓扑排序
1.6 实例
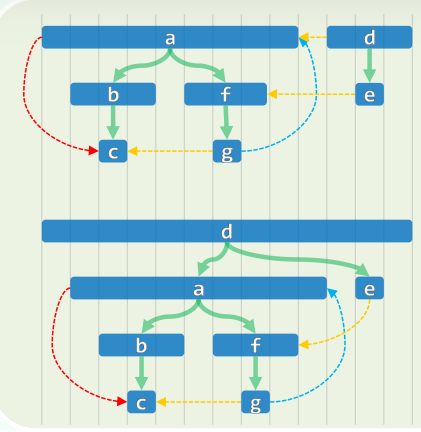
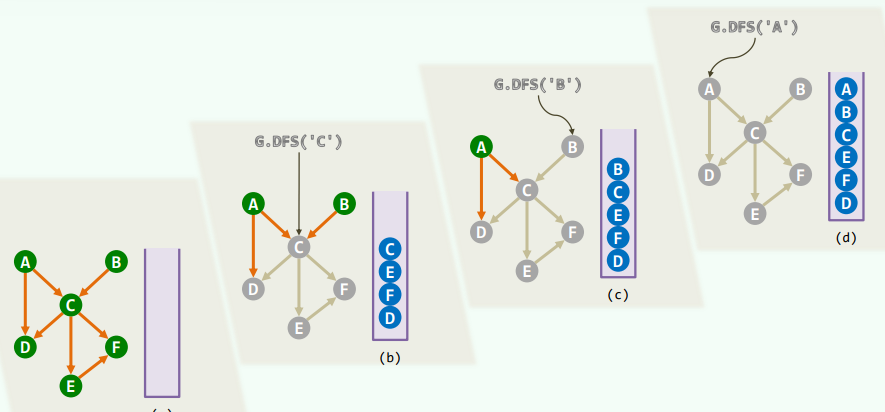
2.零出度算法
2.1 策略:逆序输出零出度顶点
//基于DFS,借助栈S
对图G做DFS,其间 //得到组成DFS森林的一系列DFS树
每当有顶点被标记为VISITED,则将其压入S
一旦发现有后向边,则报告“NOT_A_DAG”并退出
DFS结束后,顺序弹出S中的各个顶点
- 各节点按fTime逆序排列,即是拓扑排序
- 复杂度与DFS相当,也是O(n+e)
2.2 实例
template<typename Tv,typename Te> //顶点类型、边类型
bool Graph::TSort( Rank v, int & clock, Stack* S ) {
dTime(v) = ++clock; status(v) = DISCOVERED; //发现顶点v
for ( Rank u = firstNbr(v); u < UINT_MAX; u = nextNbr(v, u) ) //考查v的每一邻居u
switch ( status(u) ) { //并视u的状态分别处理
case UNDISCOVERED:
parent(u) = v; type(v, u) = TREE;
if ( ! TSort(u, clock, S) ) return false;
break; //从顶点u处深入
case DISCOVERED: //一旦发现后向边(非DAG)
type(v, u) = BACKWARD;
return false; //则退出而不再深入
default: //VISITED (digraphs only)
type(v, u) = dTime(v) < dTime(u) ? FORWARD : CROSS; break;
}
status(v) = VISITED; S->push( vertex(v) ); //顶点被标记为VISITED时入栈
return true;
}














 7万+
7万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









