







文章目录
一、概述
1.需求与动机
1.1循优先级访问
-
应用举例
- 离散事件模拟
- 操作系统:任务调度/中断处理/MRU/…
- 输入法:词频调整
-
极值元素:须反复地、快速地定位
-
集合组成:可动态变化
-
元素优先级:可动态变化
-
作为底层数据结构所支持的高效操作是很多高效算法的基础
- 内部、外部、在线排序
- 贪心算法:Huffman编码、Kruskal
- 平面扫描算法中的事件队列
1.2 优先级队列(priority queue)
template <typename T> struct PQ { //priority queue
virtual void insert( T ) = 0;
virtual T getMax() = 0;
virtual T delMax() = 0;
}; //作为ADT的PQ有多种实现方式,各自的效率及适用场合也不尽相同
- Stack和Queue,都是PQ的特例——优先级完全取决于元素的插入次序
- Steap和Queap,也是PQ的特例——插入和删除的位置受限
2.基本实现
2.1 Vector

| getMax() | delMax() | insert() |
|---|---|---|
| traverse(),Θ(n) | remove( traverse() ),Θ(n) + O(n) = (n) | insertAsLast(e),O(1) |
2.2 Sorted Vector

| getMax() | delMax() | insert() |
|---|---|---|
| [n − 1],O(1) | remove(n − 1),O(1) | insert( 1 + search(e), e ),O(logn) + O(n) = O(n) |
2.3 List
| getMax() | delMax() | insert() |
|---|---|---|
| traverse(),Θ(n) | remove( traverse() ),Θ(n) + O(1) = Θ(n) | insertAsFirst(e) O(1) |
2.4 Sorted List

| getMax() | delMax() | insert() |
|---|---|---|
| first(),O(1) | remove( first() ),O(1) | insertA( search(e), e ),O(n) + O(1) = O(n) |
2.5 BBST
-
AVL、Splay、Red-black:三个接口均只需O(logn)时间。但是,BBST的功能远远超出了PQ的需求
-
PQ = 1 × insert() + 0.5 × search() + 0.5 × remove()
-
若只需查找极值元,则不必维护所有元素之间的全序关系,偏序足矣
-
因此有理由相信,存在某种更为简单、维护成本更低的实现方式,使得各功能接口的时间复杂度依然为O(logn),而且实际效率更高
-
当然,就最坏情况而言,这类实现方式已属最优
2.6 统一测试
template<typename PQ,typenaem T> void testHeap( int n ) {
T* A = new T[ 2 * n / 3 ]; //创建容量为2n/3的数组,并
for ( int i = 0; i < 2 * n / 3; i++ ) A[i] = dice( (T) 3 * n ); //随机化
PQ heap( A + n / 6, n / 3 ); delete [] A; //Robert Floyd
while ( heap.size() < n ) //随机测试
if ( dice( 100 ) < 70 ) heap.insert( dice( (T) 3 * n ) ); //70%概率插入
else if ( ! heap.empty() ) heap.delMax(); //30%概率删除
while ( ! heap.empty() ) heap.delMax(); //清空 统一测试
}
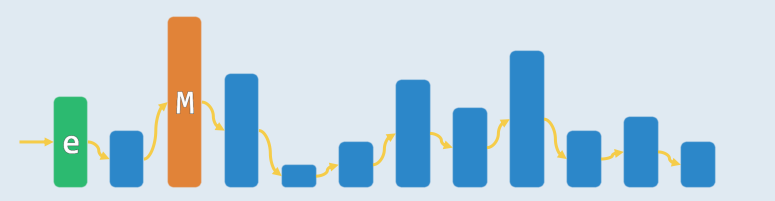
二、完全二叉堆
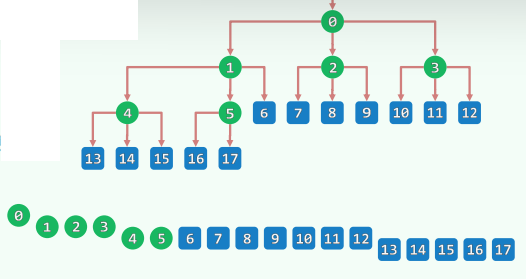
1.结构
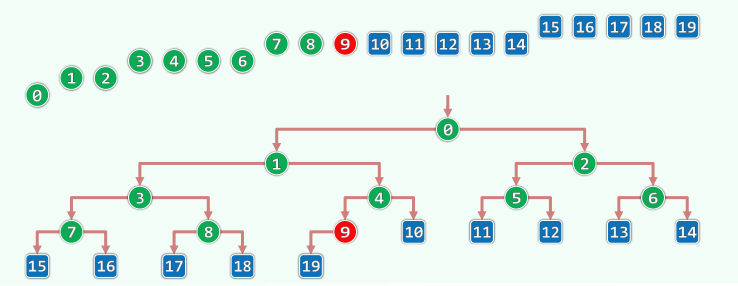
1.1 结构性:逻辑元素、物理节点依层次遍历次序彼此对应
-
#define Parent(i) ( ((i) - 1) >> 1 )
-
#define LChild(i) ( 1 + ((i) << 1) )
-
#define RChild(i) ( (1 + (i)) << 1 )
-
逻辑上,等同于完全二叉树;物理上,直接借助向量实现
-
内部节点的最大秩 = ⌊ ( n − 2 ) / 2 ⌋ = ⌈ ( n − 3 ) / 2 ⌉ =\lfloor (n-2)/2 \rfloor=\lceil (n-3)/2 \rceil =⌊(n−2)/2⌋=⌈(n−3)/2⌉
1.2 PQ_ComplHeap = PQ + Vector
template<typename T> struct PQ_ComplHeap : public PQ<T>, public Vector<T> {
PQ_ComplHeap( T* A, Rank n ) { copyFrom( A, 0, n ); heapify( _elem, n ); }
void insert( T ); T getMax(); T delMax();
};
template<typename T> Rank percolateDown( T* A, Rank n, Rank i ); //下滤
template<typename T> Rank percolateUp( T* A, Rank i ); //上滤
template<typename T> void heapify( T* A, Rank n); //Floyd建堆算法
1.3 堆序性
templat<typename T> T PQ_ComplHeap<T>::getMax() { return _elem[0]; }
- 只要 0<i,必满足 H[ i ]≤H[ Parent(i) ],故H[0]即是全局最大
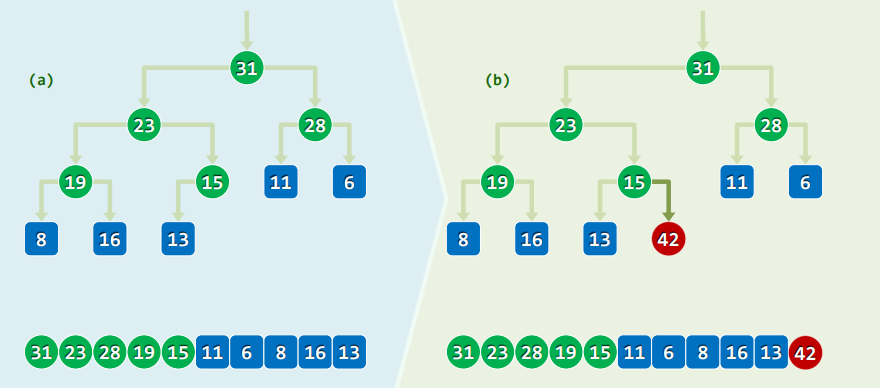
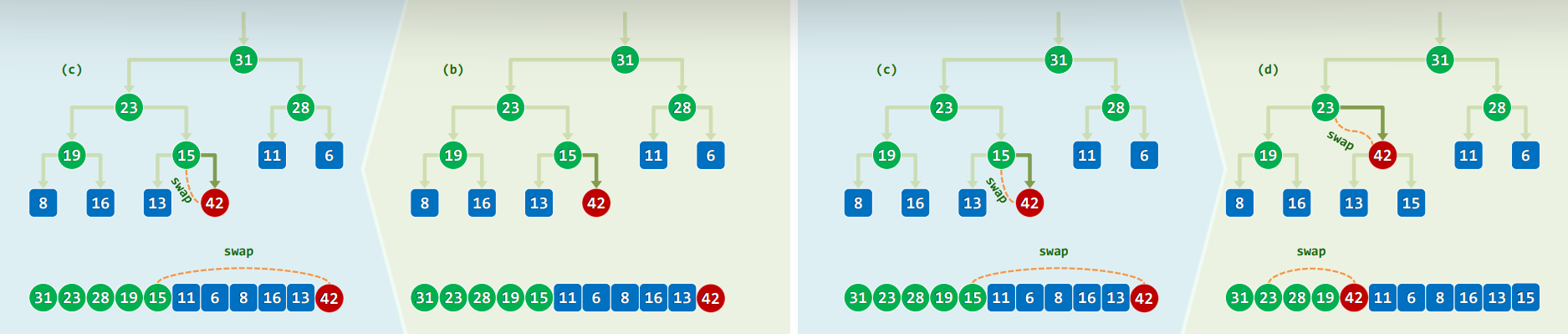
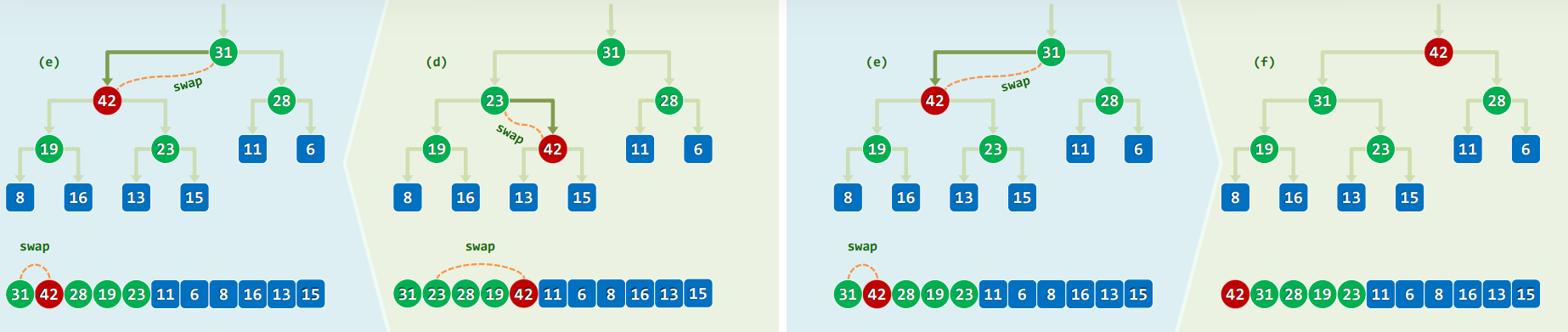
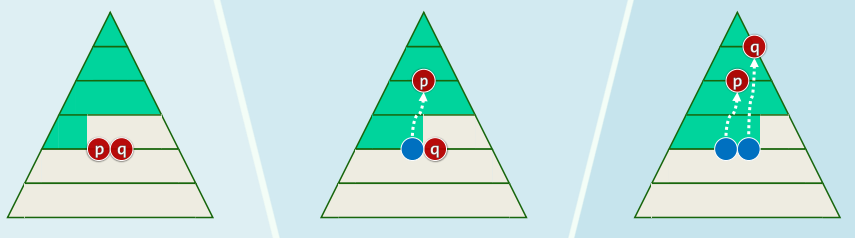
2.插入
2.1 算法:逐层上滤
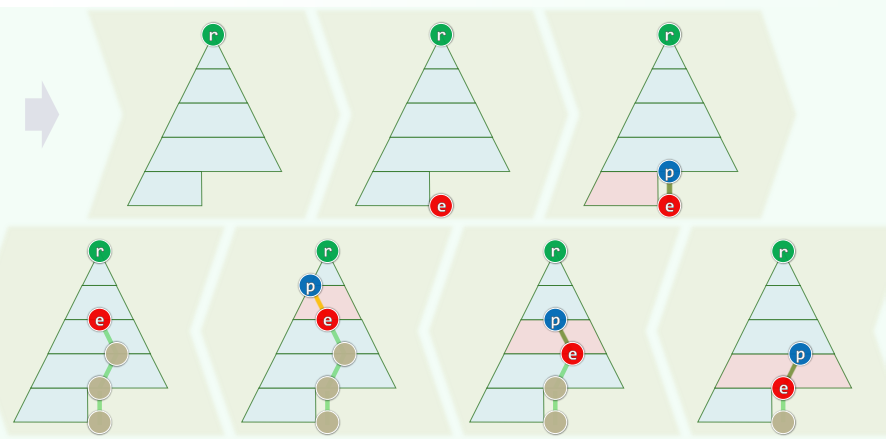
2.2 实例
2.3 实现
template<typenaem T> void PQ_ComplHeap<T>::insert( T e ) //插入
{ Vector<T>::insert( e ); percolateUp( _elem, _size - 1 ); } //此insert()非彼
template<typenaem T> Rank percolateUp( T* A, Rank i ) { //0 <= i < _size
while ( 0 < i ) { //在抵达堆顶之前,反复地
Rank j = Parent( i ); //考查[i]之父亲[j]
if ( lt( A[i], A[j] ) ) break; //一旦父子顺序,上滤旋即完成;否则
swap( A[i], A[j] ); i = j; //父子换位,并继续考查上一层
}
return i; //返回上滤最终抵达的位置
}
2.4 效率
- e在上滤过程中,只可能与祖先们交换
- 完全树必平衡,e的祖先不超过 O ( log n ) O(\log n) O(logn)个
- 故知插入操作可在 O ( log n ) O(\log n) O(logn)时间内完成
- 然而就数学期望而言 实际效率往往远远更高
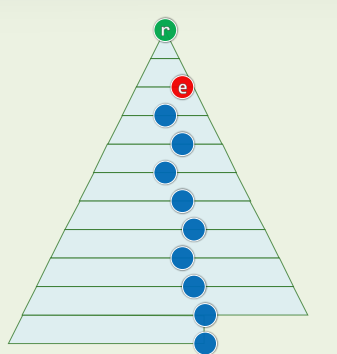
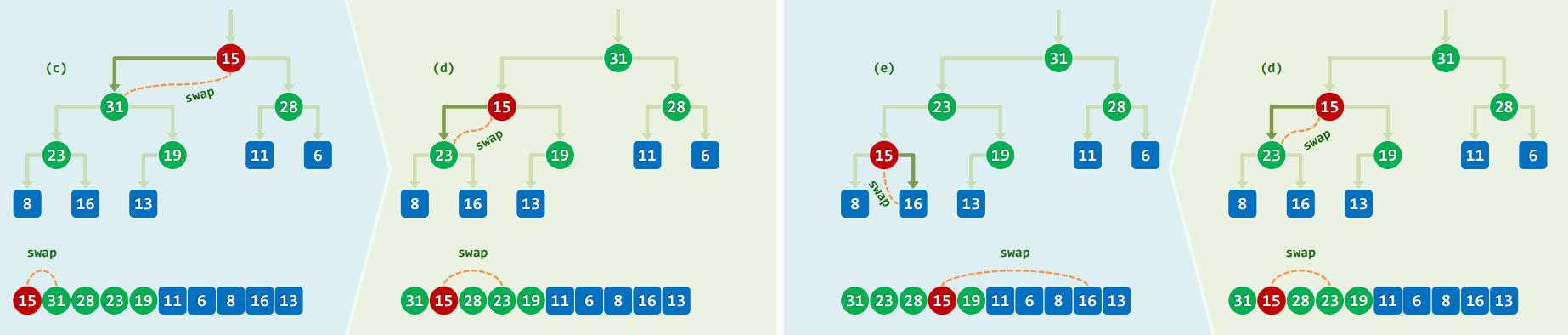
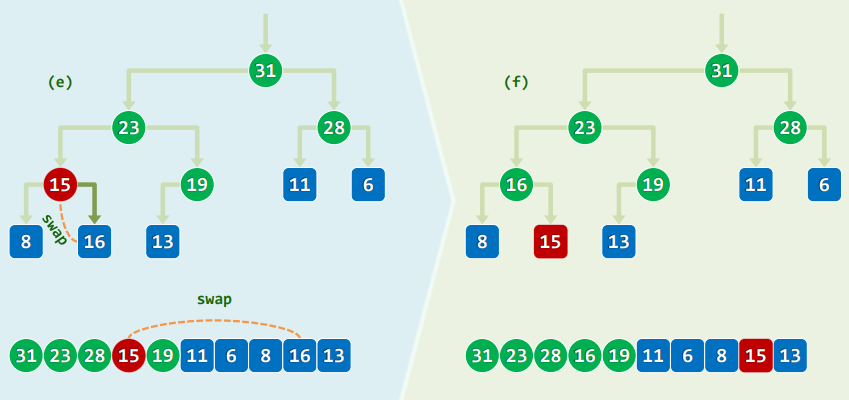
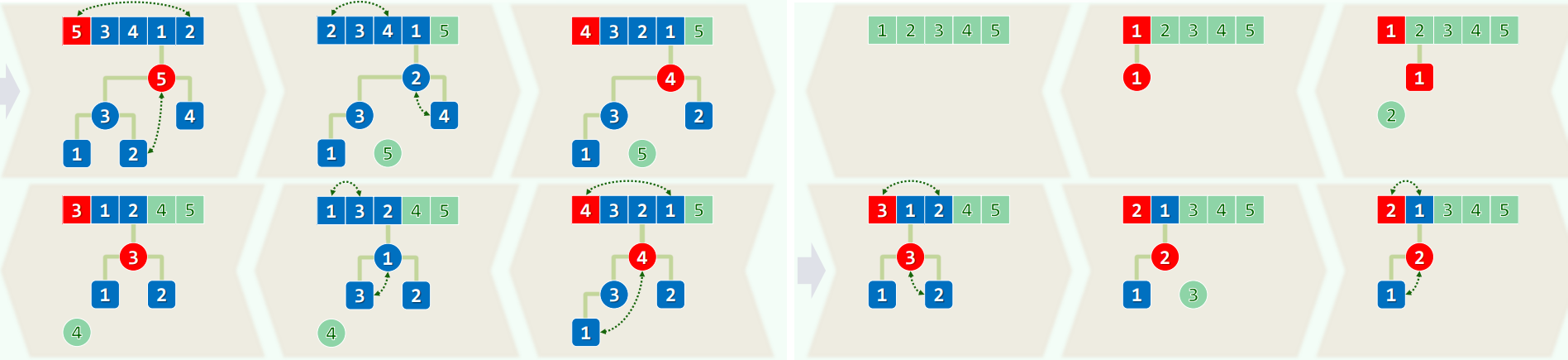
3.删除
3.1 算法:割肉补疮 + 逐层下滤
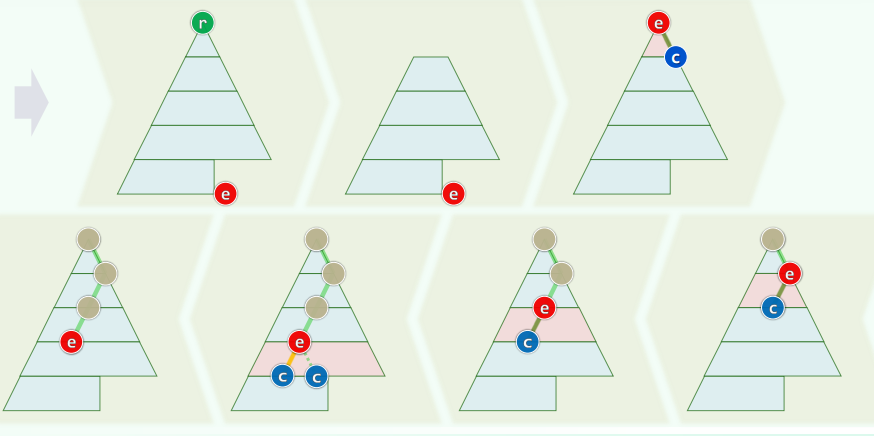
3.2 实例
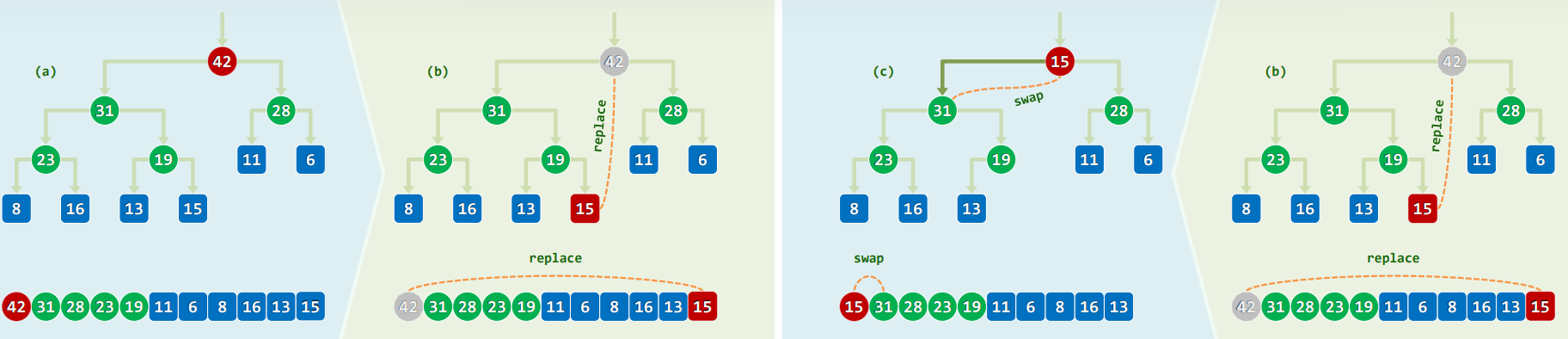
3.3 实现
template<typename T> T PQ_ComplHeap<T>::delMax() { //删除
T maxElem = _elem[0]; _elem[0] = _elem[ --_size ]; //摘除堆顶,代之以末词条
percolateDown( _elem, _size, 0 ); //对新堆顶实施下滤
return maxElem; //返回此前备份的最大词条
}
template<typename T> Rank percolateDown( T* A, Rank n, Rank i ) { //0 <= i < n
Rank j; //i及其(至多两个)孩子中,堪为父者
while ( i != ( j = ProperParent( A, n, i ) ) ) //只要i非j,则
{ swap( A[i], A[j] ); i = j; } //换位,并继续考察i
return i; //返回下滤抵达的位置(亦i亦j)
}
3.4 效率
- e在每一高度至多交换一次,累计交换不超过 O ( log n ) O(\log n) O(logn)次
- 通过下滤,可在 O ( log n ) O(\log n) O(logn)时间内删除堆顶节点,并整体重新调整为堆
4.批量建堆
4.1 自上而下的上滤
PQ_ComplHeap( T* A, Rank n ) {
copyFrom( A, 0, n );
heapify( _elem, n );
}
template<typename T> void heapify( T* A, const Rank n ) { //蛮力
for ( Rank i = 1; i < n; i++ ) //按照逐层遍历次序逐一
percolateUp( A, i ); //经上滤插入各节点
}
4.2 效率
- 最坏情况下
- 每个节点都需上滤至根
- 所需成本线性正比于其深度
- 即便只考虑底层n/2个叶节点,深度均为 O ( log n ) O(\log n) O(logn)累计耗时 O ( n log n ) O(n\log n) O(nlogn)
- 这样长的时间,本足以全排序
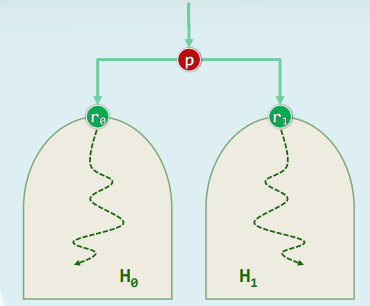
4.3 自下而上的下滤
- 任意给定堆 H 1 H_1 H1和 H 0 H_0 H0,以及节点p
- 为得到堆 H 0 ∪ { p } ∪ H 1 H_0∪\{p\}∪H_1 H0∪{p}∪H1,只需将 r 0 r_0 r0和 r 1 r_1 r1当作p的孩子,再对p下滤
template<typename T>
void heapify( T* A, Rank n ) { //自下而上
for ( Rank i = n/2 - 1; 0 <= i; i-- ) //依次
percolateDown( A, n, i ); //下滤各内部节点
} //可理解为子堆的逐层合并,堆序性最终必然在全局恢复
4.4 实例
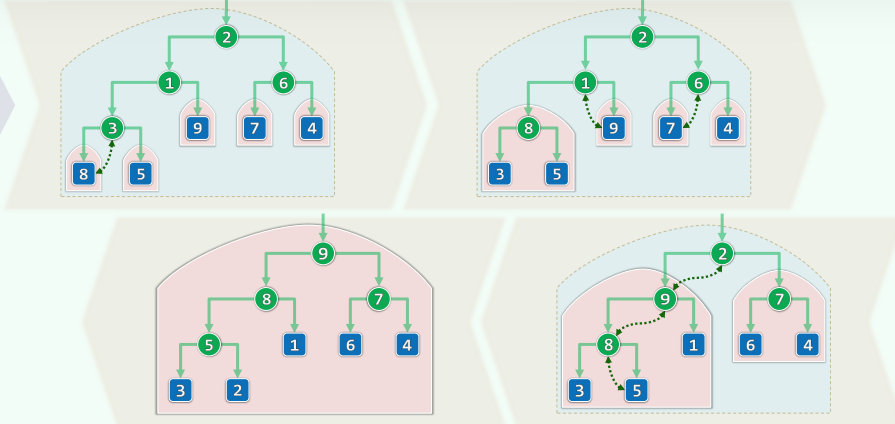
4.5 效率
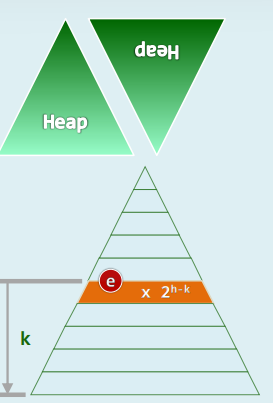
- 每个内部节点所需的调整时间,正比于其高度而非深度
- 不失一般性,考查满树: n = 2 h + 1 − 1 n=2^{h+1}-1 n=2h+1−1
- 所有节点的高度总和 S ( n ) = ∑ k = 1 h k ⋅ 2 h − k = ∑ k = 1 h ∑ i = 1 h 2 h − k = ∑ k = 1 h ∑ i = 1 h 2 h − k = ∑ i = 1 h ∑ k = 0 h − i { 2 h − i + 1 − 1 } = ∑ i = 1 h 2 h − i + 1 − h = ∑ i = 1 h 2 i − h = 2 h + 1 − 2 − h = O ( n ) S(n)=\sum_{k=1}^h k·2^{h-k}=\sum_{k=1}^h\sum_{i=1}^h 2^{h-k}=\sum_{k=1}^h\sum_{i=1}^h 2^{h-k}=\sum_{i=1}^h\sum_{k=0}^{h-i}\{2^{h-i+1}-1\}=\sum_{i=1}^h 2^{h-i+1}-h=\sum_{i=1}^h2^i-h=2^{h+1}-2-h=O(n) S(n)=∑k=1hk⋅2h−k=∑k=1h∑i=1h2h−k=∑k=1h∑i=1h2h−k=∑i=1h∑k=0h−i{2h−i+1−1}=∑i=1h2h−i+1−h=∑i=1h2i−h=2h+1−2−h=O(n)
三、堆排序
1.选取
- 在selectionSort()中将U替换为H
- 初始化 : heapify(),O(n)
- 迭代 : delMax(), O ( log n ) O(\log n) O(logn)
- 不变性 : H≤S
- O ( n ) + n ⋅ O ( log n ) = O ( n log n ) O(n) + n · O(\log n) = O(n\log n) O(n)+n⋅O(logn)=O(nlogn)
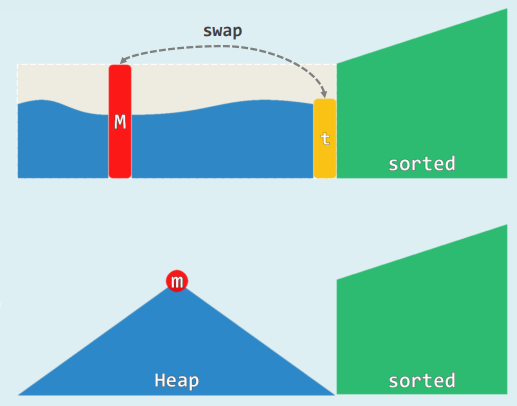
2.就地
- 在物理上 完全二叉堆即是向量
- 既然此前有:
- m = H[ 0 ]
- x = H[ n − 1 ]
- 不妨随即就: swap( m , x ) = H.insert( x ) + S.insert( m )
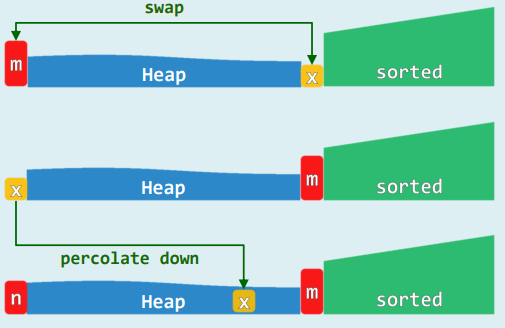
3.实现
template<typename T> //对向量区间[lo, hi)做就地堆排序
void Vector::heapSort( Rank lo, Rank hi ) {
T* A = _elem + lo; Rank n = hi - lo; heapify( A , n ); //待排序区间建堆,O(n)
while ( 0 < --n ) //反复地摘除最大元并归入已排序的后缀,直至堆空
{ swap( A[0], A[n] ); percolateDown( A, n, 0 ); } //堆顶与末元素对换后下滤
}

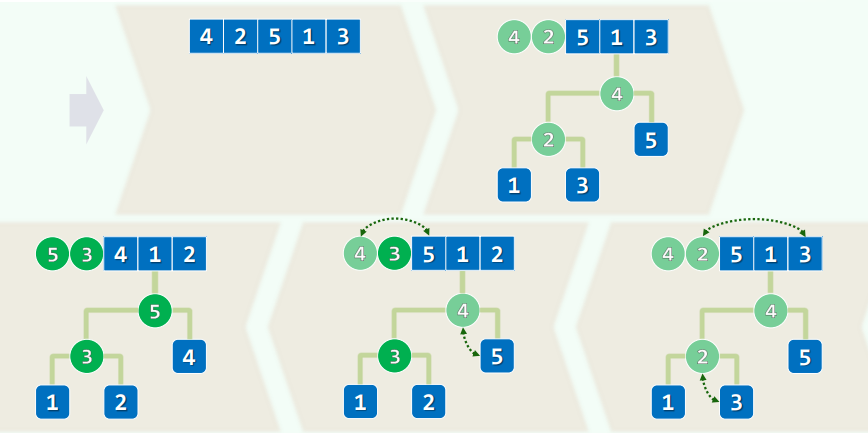
4.实例
四、多叉堆
1.优先级搜索
- 无论何种算法,差异仅在于所采用的优先级更新器prioUpdater()
- Prim算法: g->pfs( 0, PrimPU() );
- Dijkstra算法: g->pfs( 0, DijkPU() );
- 每一节点引入遍历树后,都需要更新树外顶点的优先级(数),并选出新的优先级最高者
- 若采用邻接表,两类操作的累计时间,分别为 O ( n + e ) O(n+e) O(n+e)和 O ( n 2 ) O(n^2) O(n2)
2.优先级队列
- 自然地,PFS中的各顶点可组织为优先级队列
- 为此需要使用PQ接口
- heapify(): 由n个顶点创建初始PQ,总计O(n)
- delMax(): 取优先级最高(极短)跨边(u, w),总计$O( n * \log n ) $
- increase(): 更新所有关联顶点到U的距离,提高优先级,总计 O ( e ∗ log n ) O( e * \log n ) O(e∗logn)
- 总体运行时间 = O( (n+e)*logn )
- 对于稀疏图,处理效率很高
- 对于稠密图,反而不如常规实现的版本
3.多叉堆
-
仍可基于向量实现,且父、子节点的秩可简明地相互换算
- p a r e n t ( k ) = ⌊ ( k − 1 ) / d ⌋ parent(k)=\lfloor(k-1)/d\rfloor parent(k)=⌊(k−1)/d⌋
- c h i l d ( k , i ) = k ⋅ d + i , 0 ≤ i ≤ d child(k,i)=k·d+i,0≤i≤d child(k,i)=k⋅d+i,0≤i≤d//d不是2的幂时,不能借助移位加速秩的换算
-
heapify():O(n) //不可能再快了
-
delMax(): O ( log n ) O(\log n) O(logn) //实质就是percolateDown(),已是极限了
-
increase(): O ( log n ) O(\log n) O(logn) //实质就是percolateUp()–仍有改进空间
4.上山容易下山难
- 若将二叉堆改成多叉堆(d-heap),则堆高降至 O ( log d n ) O(\log_d n) O(logdn)
- 相应地,上滤成本降至$ \log_d n$
- 但(只要d>4)下滤成本却增至 d ⋅ l o g d n = d ⋅ ln n / ln d d·log_d n=d·\ln n/\ln d d⋅logdn=d⋅lnn/lnd
5.PFS
-
如此,PFS的运行时间将是: n ⋅ d ⋅ l o g d n + e ⋅ log d n = ( n ⋅ d + e ) ⋅ log d n n·d·log_d n + e·\log_d n=(n·d+e)·\log_d n n⋅d⋅logdn+e⋅logdn=(n⋅d+e)⋅logdn
-
取 d ≈ e / n + 2 d≈e/n+2 d≈e/n+2时,总体性能达到最优: O ( e ⋅ log e / ( n + 2 ) n ) O(e·\log_{e/(n+2)}n) O(e⋅loge/(n+2)n)
-
对于稀疏图保持高效: e ⋅ log e / ( n + 2 ) n ≈ n ⋅ log n / ( n + 2 ) n = O ( n log n ) e·\log_{e/(n+2)}n≈n·\log_{n/(n+2)}n=O(n \log n) e⋅loge/(n+2)n≈n⋅logn/(n+2)n=O(nlogn)
-
对于稠密图改进极大: e ⋅ log e / ( n + 2 ) n ≈ n 2 ⋅ log n 2 / ( n + 2 ) n ≈ n 2 = O ( e ) e·\log_{e/(n+2)}n≈n^2·\log_{n^2/(n+2)}n≈n^2=O(e) e⋅loge/(n+2)n≈n2⋅logn2/(n+2)n≈n2=O(e)
-
对于一般的图,会自适应地实现最优
五、左式堆
1.沿藤合并
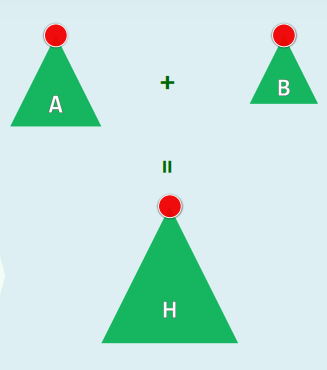
1.1 堆合并
- H = merge(A, B):将堆A和B合二为一 //不妨设|A| = n ≥ m = |B|
- 方法一: A . i n s e r t ( B . d e l M a x ( ) ) , O ( m ∗ ( log m + log ( n + m ) ) ) = O ( m ∗ log ( n + m ) ) A.insert( B.delMax() ),O( m * ( \log m + \log (n + m) ) ) = O( m * \log (n + m) ) A.insert(B.delMax()),O(m∗(logm+log(n+m)))=O(m∗log(n+m))
- 方法二: u n i o n ( A , B ) . h e a p i f y ( n + m ) , O ( m + n ) union( A, B ).heapify( n + m ),O( m + n ) union(A,B).heapify(n+m),O(m+n)
1.2 两堆合并 = 二路归并
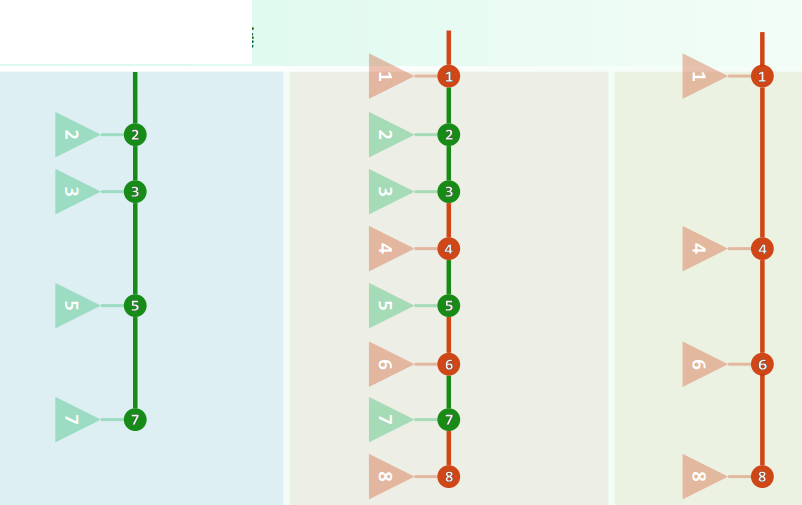
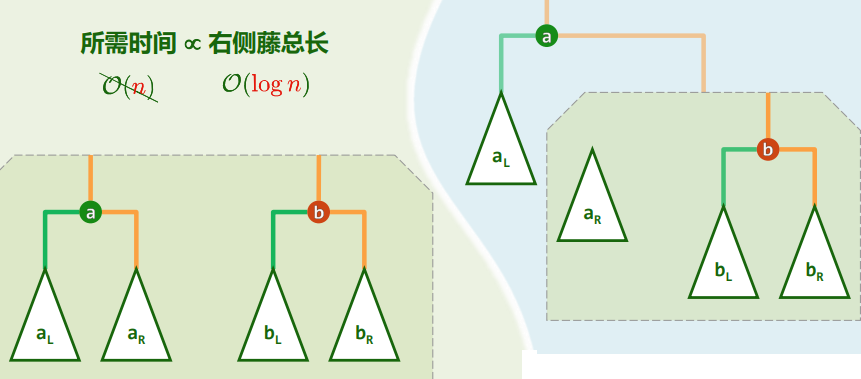
1.3 简捷 = 统一沿右侧藤
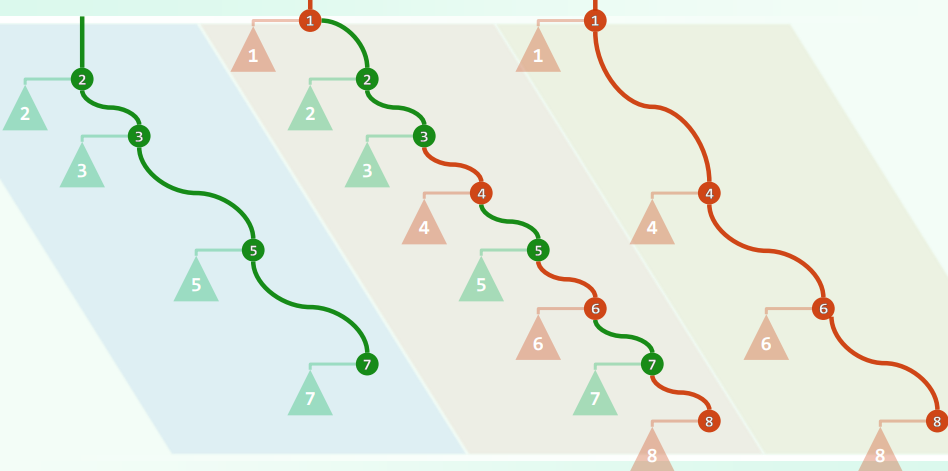
1.4 递归实现
2.NPL与控制藤长
2.1 可持续 = 单侧倾斜
- 保持堆序性,附加新条件,使得在堆合并过程中,只涉及少量节点: O ( log n ) O(\log n) O(logn)
- 新条件 = 单侧倾斜:节点分布偏向于左侧,合并操作只涉及右侧
- 则拓扑上不见得是完全二叉树,结构性无法保证
- 实际上,结构性并非堆结构的本质要求
2.2 空节点路径长度
- 引入所有的外部节点,消除一度节点,转为真二叉树
- Null Path Length
- npl(NULL)=0
- npl(x)=1+min{npl(lc(x)),npl(rc(x))}
- 验证: npl(x) = x到外部节点的最近距离 = 以x为根的最大满子树的高度
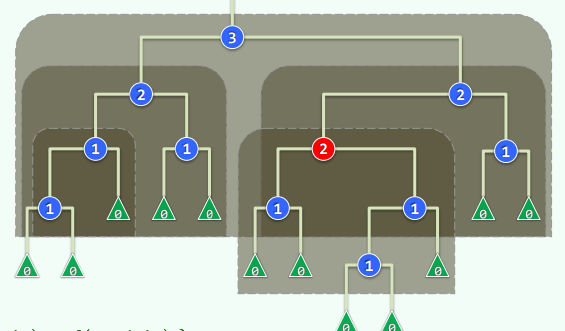
2.3 左式堆=处处左倾
-
对任何内节点x,都有:npl(lc(x)≥npl(rc(x))
-
推论:npl(x)=1+npl(rc(x))
-
左倾性与堆序性,相容而不矛盾
-
左式堆的子堆,必是左式堆
-
左式堆倾向于更多节点分布于左侧分支
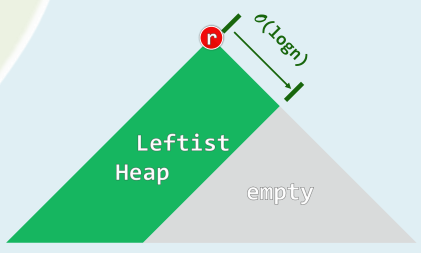
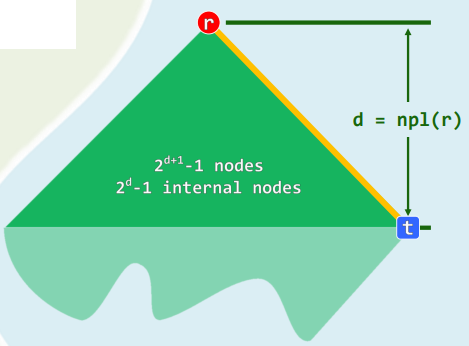
2.4 右侧链
- rChain(x):从节点x出发,一直沿右分支前进
- 特别地,rChain®的终点,即全堆中最浅的外部节点
- n p l ( r ) ≡ ∣ r C h a i n ( r ) ∣ = d npl(r) \equiv |rChain(r)|=d npl(r)≡∣rChain(r)∣=d
- 存在一棵以r为根、高度为d的满子树
- 右侧链长为d的左式堆,至少包含
- $2^d - 1 $个内部节点
- $2^{ d+1} - 1 $个节点
- 反之,包含n个节点的左式堆,右侧链长度 d ≤ ⌊ log 2 ( n + 1 ) − 1 ⌋ = O ( log n ) d≤\lfloor \log_2(n+1)-1 \rfloor=O(\log n) d≤⌊log2(n+1)−1⌋=O(logn)
3.合并算法
3.1 左式堆(LeftHeap)
template<typename T> //基于二叉树,以左式堆形式实现的优先级队列
class PQ_LeftHeap : public PQ<T>, public BinTree<T> {
public:
T getMax() { return _root->data; }
void insert(T); T delMax(); //均基于统一的合并操作实现...
PQ_LeftHeap( PQ_LeftHeap & A, PQ_LeftHeap & B ) {
_root = merge(A._root, B._root); _size = A._size + B._size;
A._root = B._root = NULL; A._size = B._size = 0;
}
};
template<typename T> BinNodePosi<T> merge(BinNodePosi<T>, BinNodePosi<T>);
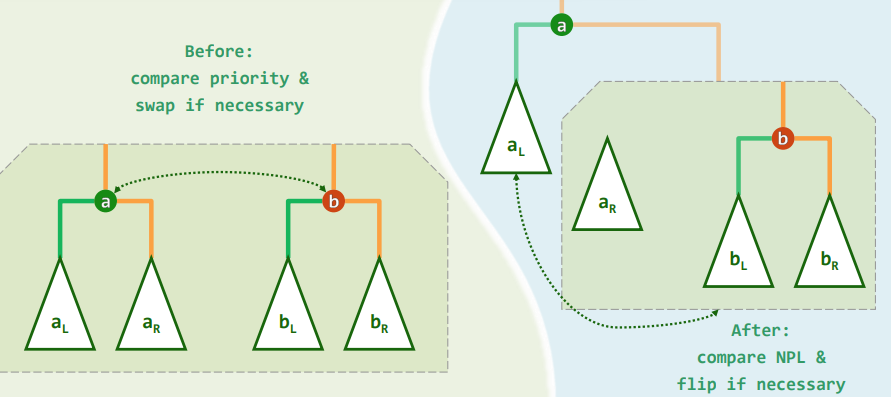
3.2 递归:前处理 + 后处理
3.3 递归实现
template <typename T> BinNodePosi<T> merge( BinNodePosi<T> a, BinNodePosi<T> b ) {
if ( !a ) return b; if ( !b ) return a; //递归基
if ( lt( a->data, b->data ) ) swap( a, b ); //确保a>=b
( a->rc = merge( a->rc, b ) )->parent = a; //将a的右子堆,与b合并
if ( ! a->lc || a->lc->npl < a->rc->npl ) //若有必要
swap( a->lc, a->rc ); //交换a的左、右子堆,以确保左子堆的npl不小
a->npl = a->rc ? 1 + a->rc->npl : 1; //更新a的npl
return a; //返回合并后的堆顶
}
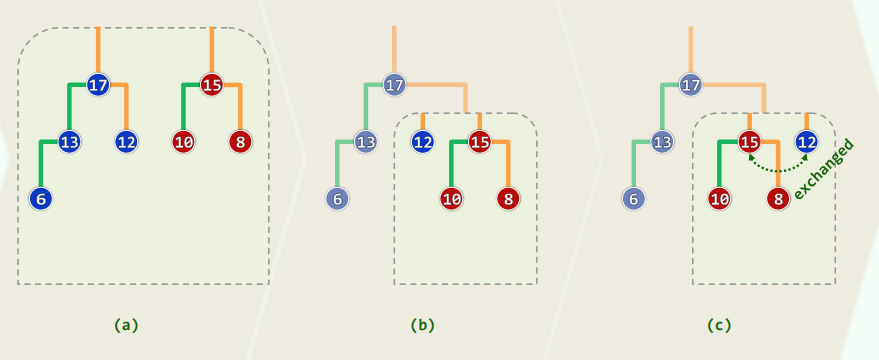
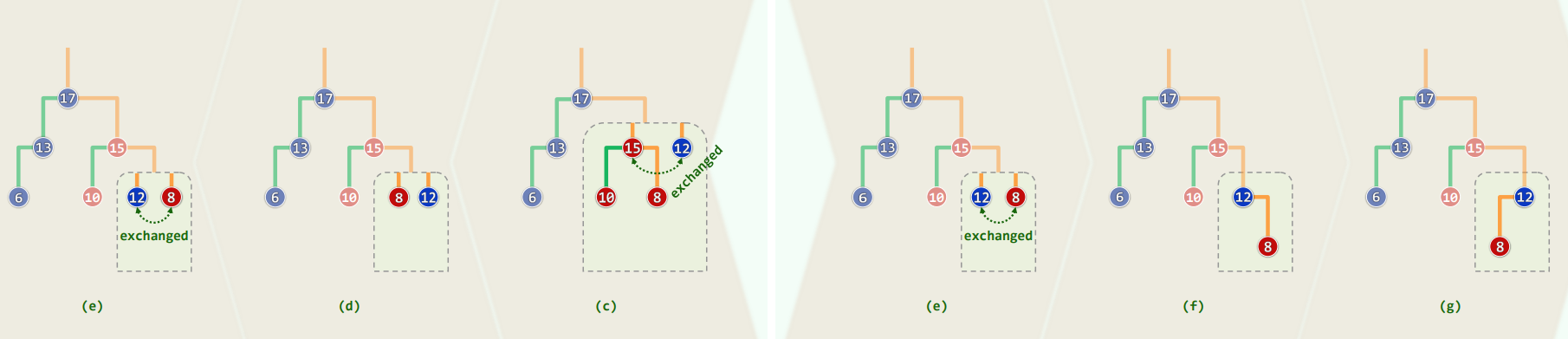
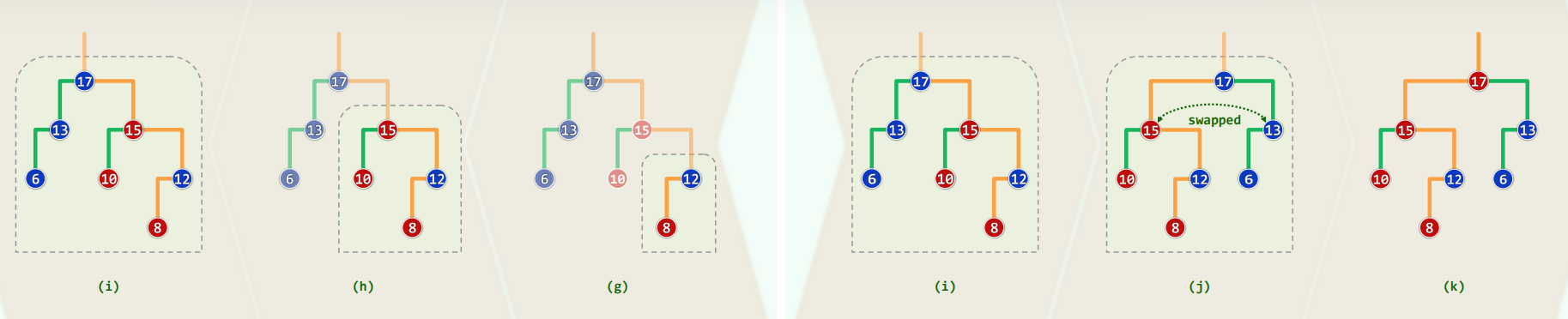
3.4 实例
3.5 迭代实现
template <typename T> BinNodePosi<T> merge( BinNodePosi<T> a, BinNodePosi<T> b ) {
if ( !a ) return b; if ( !b ) return a; //退化情况
if ( lt( a->data, b->data ) ) swap( a, b ); //确保a>=b
for ( ; a->rc; a = a->rc ) //沿右侧链做二路归并,直至堆a->rc先于b变空
if ( lt( a->data, b->data ) ) { b->parent = a; swap( a->rc, b); } //接入b
(a->rc = b)->parent = a; //直接接入b的残余部分(必然非空)
for ( ; a; b = a, a = a->parent ) { //从a出发沿右侧链逐层回溯(b == a->rc)
if ( !a->lc || a->lc->npl < a->rc->npl ) swap( a->lc, a->rc ); //确保npl合法
a->npl = a->rc ? a->rc->npl + 1 : 1; //更新npl
}
return b; //返回合并后的堆顶
}
4.插入与删除
4.1 插入
template <typename T> void PQ_LeftHeap<T>::insert( T e ) { //O(logn)
_root = merge( _root, new BinNode<T>( e, NULL ) );
_size++;
}
4.2 删除
template <typename T> T PQ_LeftHeap<T>::delMax() { //O(logn)
BinNodePosi<T> lHeap = _root->lc; if (lHeap) lHeap->parent = NULL;
BinNodePosi<T> rHeap = _root->rc; if (rHeap) rHeap->parent = NULL;
T e = _root->data;
delete _root; _size--;
_root = merge( lHeap, rHeap );
return e;
}















 3787
3787











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









