






(《指挥与控制学报》刊文精选)
引用格式 贾奋励, 王光霞, 田江鹏, 宋国民, 陈令羽. 面向全域作战态势感知的战场全息地图[J]. 指挥与控制学报, 2022, 8(1):30-36.
JIA Fen-Li, WANG Guang-Xia, TIAN Jiang-Peng, SONG Guo-Min, CHEN Ling-Yu. Pan-Information Map of Battlespace for All-Domain Operation Situational Awareness[J]. Journal of Command and Control, 2022, 8(1): 30-36.
摘要
针对全域作战中战场环境及战场态势信息来源分散、复杂高维、实时快变、多元异构,各级各类作战人员难以形成综合、完整的战场态势认知的问题,提出战场全息地图这一新型地图产品。阐释了战场全息地图的概念及特点;分析了战场全息地图的关键技术体系;探讨了战场全息地图制图服务系统的建构并给出示例。战场全息地图将位置服务中按需、实时、精准等理念扩展到战场态势服务中,有助于促进战场态势感知服务向大数据支持下的人工智能模式转换,提升战场态势服务的能力和水平。
当前,战争形态正在由信息化向智能化加速演进,战争特点规律和制胜机理发生了重大变化。2015年以来,美军陆续提出了“多域战”“全域战”的概念[1-2],其核心为“跨域协同增效”,强调多域作战能力的一体化[3]。而全域战场态势感知,则是实现“一体化”的基础,也是支撑作战人员把握全局、破网断链、体系对抗及联合制胜的重要保证[4]。
在全域战中,战场态势信息来源分散、复杂高维、实时快变、多元异构,信息的碎片化、片面化、不确定性问题严重,如何针对不同作战人员及其任务要求,实现更快、更准、更全面的战场态势感知服务,是全域作战态势感知亟需解决的关键问题。
态势感知是在一定时间和空间内感知环境中的元素,理解它们的含义,以及预测不久的将来的状态[5]。实现战场态势感知需要作战人员通过指挥信息系统对原始战场数据进行集成,形成对战场作战实体客观状态的多用户、多角度和多层级的态势信息展示[4]。当前,态势信息处理技术、态势图生成与服务技术面临严峻挑战。态势信息处理方面,态势数据已呈现多源异构、非结构化、海量且价值密度低等典型的大数据特征,态势要素的整理融合成为态势感知的技术难点之一[6]。采用大数据技术解决态势感知中的数据融合问题已在一定程度上成为共识,基于时空大数据平台的态势感知系统架构、态势数据处理的大数据方法得以研究[7-8]。然而,如何针对多源多类型态势数据的特点,构建相对统一的技术体系,避免信息来源增长、信息类型增多而导致的方法失效,仍是目前的难点。态势图服务方面,关于态势图生成[9]、态势多尺度表达[10]、态势表达组件的构建[11]等已有相关研究成果,但如何依据军兵种、作战任务、指挥层级、战场环境等的差异性,动态计算态势需求并生成态势图,仍是态势服务的难点。
事实上,战场态势感知与位置服务的理念非常相近,可借鉴其技术体系,并适当扩展。全息(位置)地图[12-14]是位置服务领域最新发展方向之一,其在信息层面强调“物理-人文-信息”三元世界的汇聚与融合,在表达层面强调二维/三维、虚拟/现实、静态/动态等多种表达形式的有机组合;在服务层面,强调“千人千面”、自主按需模式的运用。 目前, 有关全息(位置)地 图的制图模型构建[15-18]、情境模型构建[19-20]、制图数据处理[21]等方面已开展了相关研究, 并取得一定成果。
全息(位置)地图的特点与态势感知信息多样化、表达多模化、服务个性化的需求相契合。因此,论文借鉴全息(位置)地图按需、实时、精准等理念,以智能化的多源信息处理、地图制图、位置服务等技术为支撑,提出战场全息地图这一新型地图产品。通过合理有效的模型与机制设计、技术方法运用,实现具有“全息”“动态”特点的态势表达,为作战人员提供全面、实时、自适应的全域战场态势服务。
1
战场全息地图
1.1 战场全息地图的概念
战场全息地图,是以广义位置为参考,面向全域作战中各级作战人员战场态势感知的需求,基于各种定位系统、传感网、互联网、通信网等网络,实时动态获取多源异构的战场环境动静态信息,陆、海、空、天、网以及电磁等作战域的战场态势信息,通过内容智能理解、统一时空地理关联、战场态势知识迭加融合、面向情境的信息聚合与可视化服务等,建立时空基准统一、语义关系一致、内容自适应的全信息战场态势图。
广义位置是战场全息地图的基础,其包含3个层次。1)物理位置:指关注点(区域)的时空物理位置,表现为特定参照系下的时空坐标(串),如经纬度、大地直角坐标等。2)场所位置:物理位置必然与某个场所关联。不同场所包含的对象物件、所发生的事件、所产生的作用、蕴含的文化内涵是不同的。例如某某高地,其隐含了易于防守、侦察视野开阔、战斗要地等含义。3)语义位置:指在一定的语义系统中,某种语义所指代的含义,可根据若干属性维度建立语义基准进行描述,得到某语义在语义空间中的位置,如某作战人员在部队编成中的位置、某作战单元在作战任务中承担的任务序列等等。在这3个层次中,物理位置是融合战场环境和战场态势信息的基础;场所关联了物理位置与地理实体,场所的可供性关联了人物、事物、事件等;而语义位置则可以实现更广泛的信息关联。基于广义位置概念,战场态势感知需求都可以转化为某种语义基准下的位置关系计算与表达问题。
1.2 战场全息地图的特点
1.2.1全息
全息,即全信息,是指信息更为全面,即相对于主体的应用情境而言,能够满足其需求的全信息。在信息领域,语法、语义和语用信息的有机综合称为“全信息”。针对战场全息地图,“全息”有更为明晰的内涵。
在信息来源与内容方面,1)语法层面的全息,指信息形式与来源的全面。不仅包括传统的战场环境信息,也包括产生于战术互联网上的指令、情况、态势等信息,泛在网上的社交、天气、交通等信息;不仅包括数字地图,也包括文本、图像、视频等新媒体信息;2)语义层面的全息,是指信息内容的全面。不仅包括静态的战场环境信息,也包括实时动态变化的战场环境信息与战场态势信息;3)语用层面的全息,是指在上述信息的支撑下,通过计算机系统推理可得到“潜信息”。在战场全息地图中,“潜信息”可看作是各类态势信息单元之间的关联关系,基于此,可进一步挖掘出“势”的信息。
在表达方式与符号语言方面,1)语法层面的全息,指表达方式方法全面。不仅可以用传统的二维地图表示,也可以用三维地图、增强现实等方式表达;2)语义层面的全息,是指地图语言类型与内涵的丰富。战场全息地图可以采用图形符号语言、手势语言甚至自然语言等,无论是单一类型的符号系统还是混合类型的符号系统,都具有系统性、完整性等特点;3)语用层面的全息,是指用户通过感觉通道进行模式识别能够得到战场态势的“潜信息”。
1.2.2动态
战场全息地图的“动态”表现在以下3个方面:1)动态需求分析:根据广义位置信息,如物理位置信息、时间信息、人员信息等推断出作战人员的态势信息需求,这一过程在战场全息地图的制用图过程中是不间断的。2)动态信息处理:根据需求分析结果,实时进行战场环境和战场态势信息的处理,包括获取、提取、转换、理解、融合、分析等。3)动态表达设计:根据需求与信息特点,实时进行战场全息地图的设计与制作,包括表示方法设计、符号设计、环境与态势数据向制图数据的转换、地图绘制等。
2
战场全息地图的关键技术
从技术体系上,战场全息地图以联合作战各级指挥机构对战场态势认知需求为牵引,面向“多域战”“全域战”等新型作战样式,围绕制约战场态势认知的全面性、准确性、时效性、按需服务等关键性问题,构建多元异构战场环境与态势信息智能解析与集成融合方法及按需服务机制,形成时空基准统一、语义关系一致、信息全面可靠、表达手段丰富的战场全息地图产品。为此,需要回答3个问题:1)如何按照时空框架组织、聚合模糊的、非结构化的态势信息?2)如何确定不同作战人员在不同情境下所需要的态势信息?3)针对战场全息地图内容、表达要求的实时动态变化,如何实现动态制图与服务?回答这3个问题,涉及到以下3项关键技术。
2.1 多源异构非结构化信息位置聚合技术
多源异构非结构化信息位置聚合的目的是将散乱的、无序的各类战场环境与战场态势信息按照一定的模式进行解构再聚合,实现信息的结构化与有序化,转变为战场全息地图可使用并提供服务的信息乃至知识。该技术的总体思路如图1所示。
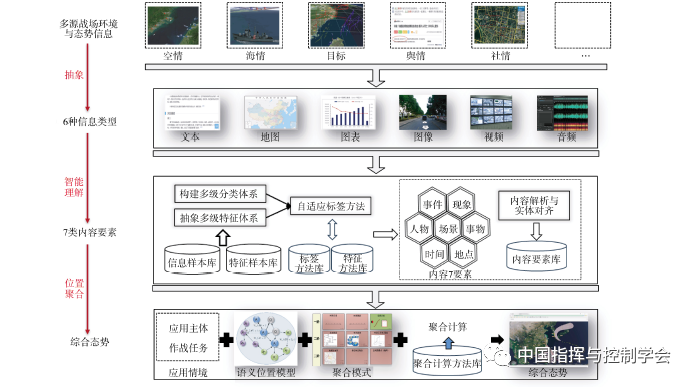
图1 多源异构非结构化信息位置聚合的基本思路
Fig. 1 Basic idea of location aggregation of multi-source heterogeneous unstructured information
战场全息地图需要处理陆、海、空、天、网、电磁频谱等作战域的各类信息,其中包含许多非结构化信息。这些信息蕴含丰富的民情社情、战场环境动态变化、战场态势等信息。其与传统的结构化数据相结合,对形成战场态势的全面认知具有重要作用。比较而言,传统结构化数据的处理加工,已形成较为完善的技术与方法体系,而对非结构化信息的处理,特别是非结构化信息的内容理解,是当前计算机、人工智能、测绘地理等领域的研究热点。
从战场环境及态势信息的媒体类型的角度进行分析,无论战场全息地图的信息来源如何变化、信息内容如何差异化,都可抽象为文本、图像、视频、音频、地图和图表等6种类型。建立这6种类型信息的内容理解方法与模式,可以避免信息来源增长、信息类型增多而导致的方法失效,实现信息接入与处理能力的“全息”。
为实现六种类型信息的内容理解,本文提出 “分类-特征-方法”三位一体的态势信息内容理解技术架构。其中,分类是指构建6类媒体的分类体系,用以描述不同媒体在多个侧面上的差异性;特征是指认知、理解态势信息内容的最小信息描述单元。针对不同媒体类型下的态势信息,其特征可能在信息存储、信息结构、信息表达等方面存在差异性,按照媒体分类总结、分解特征,进而可以抽象出不同类型信息的特征体系;在分类体系和特征体系的支撑下,基于自然语言处理、图形图像处理、机器学习等技术,构建特征挖掘的方法库,从而在技术上实现不同特征的挖掘。
从语言学的视角,态势信息的特征体系可以分为基本特征、内容特征两个层次。基本特征体系描述了不同媒体的信息类型、结构、特点、主题等多方面信息的基本描述项;内容特征是以基本特征为基础,经过一定的算法模型处理,所得到的态势信息内容的描述。无论哪种信息类型,其内容都可以按照“时间、地点、人物、事物、事件、现象、场景”7类要素[14]进行概括。定义每类要素的属性分类方法及其形式化描述方式如图 2 所示,可以实现信息内容的统一描述。
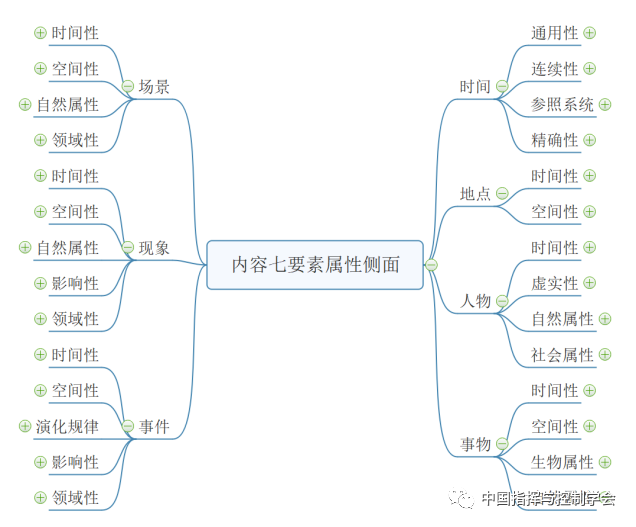
图2 内容7要素属性侧面定义
Fig. 2 Content elements attribute definition
“分类-特征-方法”三位一体的态势信息内容理解技术架构,将文本、图像、视频、音频、图表、地图等类型媒体的内容理解方法体系统一到一个框架下,兼顾了接口层面的统一性以及实现方法上的差异性,能够实现不同类型态势信息内容理解方法的“统而不同”,从而为态势信息综合利用奠定基础。
在要素特征提取的基础上,利用知识图谱技术,实现内容要素的实体对齐、关联关系构建,形成战场全息地图内容要素库。应用时,根据不同的应用情境,在广义位置模型的支撑下,基于聚合模式与聚合算子,实现态势信息聚合,并经过自适应动态制图,形成战场全息地图。聚合模式包括时间序列、空间范围、语义关联以及组合等分析模式;而聚合算子则根据内容七要素的具体描述信息从时空、语义等方面进行规范化、相似性、相关性、分类分级等计算,构建战场全息地图数据集。
2.2 战场全息地图的情境感知与推理技术
情境是指任何可以用来刻画一个实体的属性集或描述实体的关系集。情境感知技术源于普适计算,是指通过传感器及其相关技术使计算机设备能够“感知”到当前的情境[22]。
战场全息地图是针对不同人员需求而构建的定制化态势产品,情境驱动的应用服务模式是其区别于以往态势产品的重要特征之一。所谓情境驱动,是指根据“感知”到的情境信息,动态确定需要提供哪些态势信息;而在战场全息地图的完整服务过程中,情境感知与推理是不间断的。为实现情境感知与推理,需要构建战场全息地图的情境要素模型以及不同情境要素与战场环境信息、战场态势信息的关联关系,在此基础上设计情境推理的过程与机制。
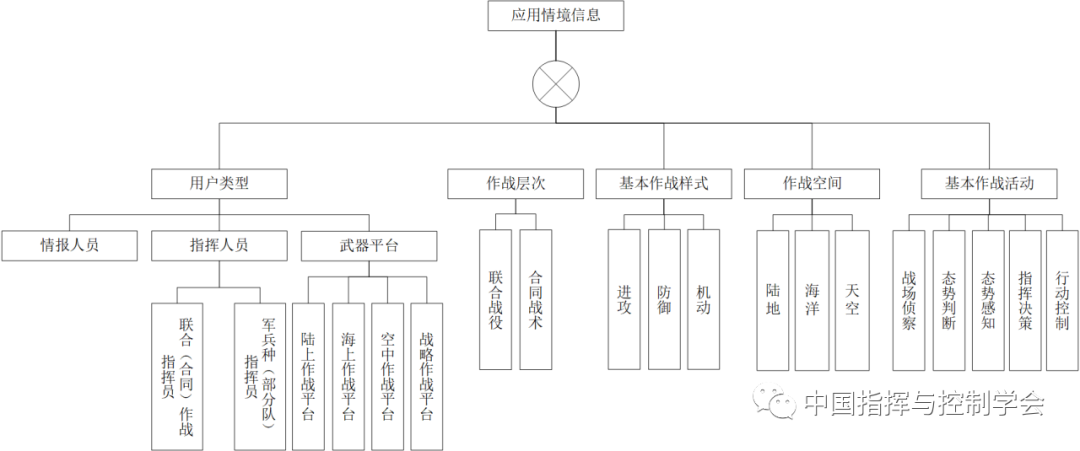
图3 战场全息地图的情境要素模型定义(简化)
Fig. 3 Definition of context element model of B-PIM(simplify)
梳理战场环境信息和战场态势信息的类别,可以建立情境要素与战场全息地图制图所需信息的类别关联关系。基于战场全息地图的应用情境信息以及信息关联关系,可建立战场全息地图的情境推理计算模型。该模型主要负责将单个情境信息转换为综合性情境的规则化描述,根据广义位置信息计算得出战场全息地图制图信息,并触发信息提取操作。
2.3 战场全息地图动态制图技术
与其他类型的地图相比,战场全息地图的制图与用图过程已发生重要变化。其中最突出的特点是由于“广义位置”的驱动作用,制图者与用图者之间的交互较之纸质地图的间接交互、地理信息系统的应答式交互,转变为实时、连续的主动式交互。这种交互模式带来制图过程中一系列处理流程的变化。1)实时与连续交互:交互及其响应在时间上的急剧缩短,引起对信息处理、地图表达的要求急剧提高,如用图需求随时可能发生变化;战场全息地图所表达的信息为实时(近实时)信息;制图者需要在极为有限的时间内完成制图数据处理以及地图的设计与制作。2)主动式交互:交互发起者由用户转变为制图系统,用图需求除少部分是由用户显式描述外,大多需要制图系统根据广义位置参数进行推理与计算。
上述交互模式的变化,使得战场全息地图制图必须改变以往地图制用分离的状况,构建出“建制用一体”的动态制图模式,才能满足上述要求。
本质上,战场全息地图的动态制图遵循“以认知规律为指导、以语义为核心、以形式语言为支撑、先解构再重构”的思想,通过对视觉认知模式的分析和对制图过程及其语义内涵的逐级分解,抽取适宜认知的多层次共性构件,实现单一过程的形式化描述,构成基元库。进而根据“广义位置”信息经语义计算实现基元选取、不同层次构件重组,直至构建出最终的地图。这些基元包括数据处理、总体设计、内容组织、符号化表达、制图输出等一系列地图制图的操作以及每个过程中的子步骤。
3
战场全息地图制图服务系统构建与应用示例
上述3项关键技术,为战场全息地图的构建奠定了技术基础,而为实现战场态势感知服务,还需要融合这3项关键技术,构建战场全息地图制图服务系统,并提供态势服务。
战场全息地图制图服务系统在接入各类战场环境信息、战场态势信息的基础上,实现非结构化信息向结构化信息转化;低可信度向可追溯信息转化、非空间化信息向基于实体的聚合信息转化,进而基于内容七要素进行关联分析,实现零散、多源、多类型战场态势的有机关联与聚合;通过情境感知与推理以及动态制图技术,实现战场全息地图的自适应服务。
3.1 战场全息地图制图服务系统架构
战场全息地图制图服务系统总体架构如图4所示,其总体上分为4层:资源层、核心层、服务层和应用层。资源层:由网络环境下的各种资源组成,包括各种数据资源、计算资源、存储资源及设备等,它们通过一定的通信设备实现物理连接。资源层所包含的数据类型包括战场环境信息和战场态势信息。核心层:核心层实现具体的核心处理业务,由多个模块组成,分别为多源异构非结构化信息位置聚合引擎、态势情境感知与推理引擎、战场全息地图动态制图引擎。服务层:提供核心层各模块实现的各类服务,如制图服务、导航服务、标绘服务等。应用层:基于核心层、服务层所提供的开发包综合集成战场全息地图制图服务系统,并可为各种应用提供接口。
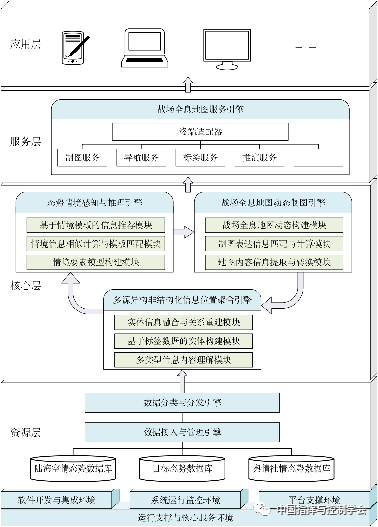
图4 战场全息地图制图服务系统架构
Fig. 4 Cartography service system architecture of B-PIM
3.2 战场全息地图构建示例
根据战场全息地图制图服务系统架构,战场全息地图构建的关键就在于核心层所能提供的计算能力。而计算的目标则在于使得战场全息地图能够描述从时空位置、几何形状、语义描述、属性特征、演化过程、要素关系等[14]等维度描述战场环境与战场态势。不同维度所表达的侧重点是不同的,其数据处理流程、方法以及最终的表达形式都是不同的。
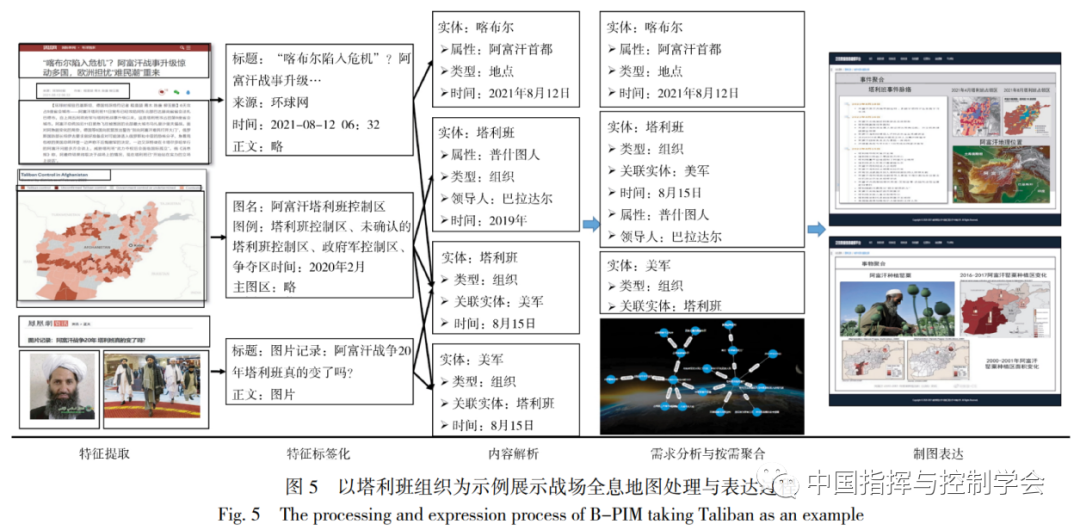
以塔利班事件为例,简要说明战场全息地图的构建过程。就塔利班事件而言,其时间跨度长,地理位置特殊,涉及的人员、事件复杂,如能分别以时间、地点、人物、事件、事物等要素为线索进行信息关联聚合,进而实现制图表达与服务,对于理解事件的来龙去脉、地缘影响、军事意义等具有重要作用。本文主要从环球网、中新网、搜狐、网易、参考消息网等主流媒体上下载各媒体上的网页,分解为文本、图像、地图、图表等类型。针对不同类型的媒体,进行相应的处理(如图5所示),并按照7类内容要素提取相应的信息。将这些信息作为制图数据中的专题信息加以使用,通过情境分析、制图数据重构、表达模板选择以及形式语法编译等处理,最终形成具有多种表达方式的动态战场全息地图。
4
结论
本文面向我军战场态势感知服务存在的问题,提出并阐释了战场全息地图的概念,分析了相关关键技术,说明了战场全息地图制图服务系统的基本架构,并通过示例说明战场全息地图的构建流程。战场全息地图将位置服务中按需、实时、精准等理念扩展到战场态势服务中,是一种新的思路与尝试。但对其研究还需要继续深入。战场全息地图目前仅能回答事实性问题,例如某地区发生哪些事件;某事件涉及哪些人、发生地在哪等;当原始信息中无因果关系时,战场全息地图尚无法推理得出上述关系,如事件为什么会发生,其促因是什么,影响程度如何等。真正得出因果关系,需要更多领域分析推理模型来完成。对于满足不同类型作战人员战场态势认知需求方面,还需要更为基础、细致、深入的研究以及应用实践,以此来促进战场态势信息服务向大数据支持下的人工智能模式转换,提升战场态势服务的能力和水平。
References
1 李白. 美军推行“全域战”的内在逻辑探析[J]. 军事文摘,2020(10): 54-57.
LI B. On the internal logic of the US Military’s implementation of ‘All-domains Openration’[J]. Military Digest, 2020(10): 54-57.
2 文予. 从“多域战”到“全域战”———对美军作战概念演化的理论思考[EB/OL].(2020.05.27)[2021.08.10] http://knowfar. net.cn/detail-6-10413674.aspx.
WEN Y. From“Multi-Domain Operation”to“All-Domain Operation”: thoughts on the U.S. armed forces conceptual evolution of operations[EB/OL].(2020.05.27)[2021.08.10] http://knowfar.net.cn/detail-6-10413674.aspx.
3 吴正午, 付建川, 任华, 等. 体系作战下的多域指挥与控制探讨[J]. 指挥与控制学报, 2016, 2(4): 292-295.
WU Z W, FU J C, REN H, et al. Discussion on multi-domain command and control for system of systems combat[J]. Journal of Command and Control, 2016, 2(4): 292-295.
4 汪跃, 唐志军, 车德朝, 等. 战场态势一张图技术综述[J]. 指挥信息系统与技术, 2020,11(1): 12-17.
WANG Y, TANG Z J, CHE D C, et al. Overview of unified battlefield situation map technology[J].Command Information System and Technology, 2020,11(1): 12-17.
5 段玉先, 刘昌云, 魏文凤. 战场态势感知关键技术研究[J].火力与指挥控制, 2021, 46(11): 1-11.
DUAN Y X , LIU C Y, WEI W F. Review of key technologies for battlefield situational awareness[J]. Fire Control& Command Control, 2021, 46(11): 1-11.
6 王永利, 谢策, 张永亮, 等. 态势认知总体框架及其关键技术[J].指挥信息系统与技术, 2021, 12(3): 7-12.
WANG Y L, XIE C, ZHANG Y L, et al. Framework and its key technology of situation cognition[J]. Command Information System and Technology, 2021, 12(3): 7-12.
7 崔令飞,郭永红,邵鹏志,等.运用时空大数据增强战场态势感知能力[J]. 国防科技, 2021, 42(2): 127-132.
CUI L F, GUO Y H, SHAO P Z, et al. Enhancing situational awareness on the battlefield using spatio-temporal big data[J]. National Defense Technology, 2021, 42(2): 127-132.
8 彭亚飞, 杨凡德. 战场态势认知综述[J]. 兵工自动化, 2021,40(7): 24-27.
PENG Y F, YANG F D. Battlefield situation cognition overview[J]. Ordnance Industry Automation, 2021, 40(7): 24-27.
9 李作君, 薛雯, 祁青青. 基于时空联合可视化的快速态势感知方法[J]. 信息化研究, 2018, 44(1): 18-22.
LI Z J, XUE W, QI Q Q. Efficient situation awareness method based on spatio-temporal visualization[J]. Informatization Research, 2018, 44(1): 18-22.
10 黄亚锋,李旭东,张航峰.战场态势多尺度表达研究[J]. 系统仿真学报, 2018, 30(2): 18-22.
HUANG Y F, LI X D, ZHANG H F. Multi-scale representation of battlefield situation[J]. Journal of System Simulation, 2018, 30(2): 18-22.
11 李路遥, 杜国红, 徐新伟. 综合战场态势组件化表达模型研究[J]. 指挥控制与仿真, 2016, 38(4): 13-17.
LI L Y, DU G H, XU X W. Component-based expression model of integrated battlefield situation[J]. Command Control & Simulation, 2016, 38(4): 13-17.
12 周成虎, 朱欣焰, 王蒙, 等. 全息位置地图研究[J]. 地理科学进展, 2011, 30(11): 1331-1335.
ZHOUCH, ZHUXY, WANGM, et al. Panoramic location-based map[J]. Progress in Geography, 2011, 30(11): 1331-1335.
13 国家科技部. 导航与位置服务‘十二五’专项规划[R/OL].(2012-09-18)[2021-11-10]. http://www.gov.cn/zwgk/2012-
09/18/content_2227443. htm.
Ministry of Science and technology. Seecial plan for the 12th five year plan for the development of navigation and location service technology[R/OL].(2012-09-18)[2021-11-10]. http://www.gov.cn/zwgk/2012-09/18/content_2227443. htm.
14 俞肇元, 袁林旺, 吴明光, 等. 地理学视角下地理信息的分类与描述[J]. 地球信息科学学报, 2019, 24(1): 17-24.
YU Z Y, YUAN L W, WU M G, et al. Classification and description of geographic information from the perspective of geography[J]. Journal of Geo-information Science, 2019, 24(1):17-24.
15 游天. 情境驱动的室内位置地图表达理论与方法研究[D].郑州: 解放军信息工程大学, 2017.
YOU T. Research on theory and methods of context-driven indoor location map representation[D]. Zhengzhou: Information Engineering University, 2017.
16 JIA F L, WANG G X, TIAN J P, et al. Research on holographic location map cartographic model[C]//International Cartographic Association. Proceedings of the 11th International Symposium on Location-Based Services, Wien, Austria: Vienna University of Technology, 2014.
17 田江鹏, 游雄, 贾奋励, 等. 移动地图制图的句法模型[J]. 测绘学报, 2016, 45(11): 1352-1360.
TIAN J P, YOU X , JIA F L, et al. The syntax model of mobile maps generation[J]. Acta Geodaetica et Cartographica sinica, 2016, 45(11): 1352-1360.
18 田江鹏. 移动地图的认知语义理论与动态制图模型[D]. 郑州: 解放军信息工程大学, 2016.
TIAN J P. Cognitive semantics theory and dynamic carto-graphic model of mobile map[D]. Zhengzhou: Information Engineering University, 2016.
19 齐晓飞, 王光霞, 崔秀飞, 等. 位置地图情境建模与实例分析[J]. 地球信息科学学报, 2014, 16(5): 712-719.
QI X F, WANG G X, CUI X F, et al. Case analysisi of context modeling of location map[J]. Journal of Geo-Information Science, 2014, 16(5): 712-719.
20 齐晓飞. 位置地图情境建模、推理与表达研究[D]. 郑州: 解放军信息工程大学, 2014.
QI X F. Location map context modeling, reasoning and expression[D]. Zhengzhou: Information Engineering University, 2014.
21 孙卫新. 室内位置地图数据处理的模型与方法研究[D].郑州: 解放军信息工程大学, 2016.
SUN W X. Research on models and methods of indoor location map data processing[D]. Zhengzhou: Information Engineering University, 2016.
22 SCHILIT B N, ADAMS N, WANT R. Context-aware computing applications[C]//Proceedings of Workshop on Mobile Computing Systems and Applications. Santa Cruz, USA: IEEE, 1994: 85-90.
作者简介
贾奋励(1976-), 女, 博士, 副教授, 主要研究方向为作战空间认知与全息地图以及虚拟地理环境.
王光霞(1962-), 女, 博士, 教授, 主要研究方向为全息地图和地图制图. 本文通信作者.
田江鹏(1987-), 男, 博士, 讲师, 主要研究方向为全息地图和机器地图.
宋国民(1973-), 男, 博士, 教授, 主要研究方向为作战环境数据工程和作战环境建模.
陈令羽(1987-), 男, 博士, 讲师, 主要研究方向为DEM 信息伪装和战场环境仿真.
排版校对:刘亚丽
转载请标明作者信息及出处
关注公众号了解更多
会员申请 请在公众号内回复“个人会员”或“单位会员
欢迎关注中国指挥与控制学会媒体矩阵
CICC官方网站
CICC官方微信公众号
《指挥与控制学报》官网
国际无人系统大会官网
中国指挥控制大会官网
全国兵棋推演大赛
全国空中智能博弈大赛
搜狐号
一点号

















 4766
4766

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









