






- 名称:旋转方向设定
- 单位:-
- 范围:0~1
- 默认值:1
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置指定指令的方向和电机动作方向的关系。
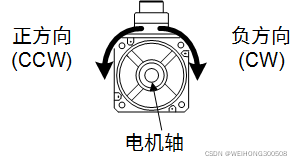
| 值 | 正向指令 | 负向指令 |
| 0 | 电机旋转方向为 CW 方向(从轴侧看电机为顺时针方向),正方向驱动禁止输入有效。 | 电机旋转方向为 CCW 方向(从轴侧看电机为逆时针方向),负方向驱动禁止输入有效。 |
| 1 | 电机旋转方向为 CCW 方向(从轴侧看电机为逆时针方向),正方向驱动禁止输入有效。 | 电机旋转方向为 CW 方向(从轴侧看电机为顺时针方向),负方向驱动禁止输入有效。 |
- 名称:控制模式设定
- 单位:-
- 范围:0~3
- 默认值:1
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置使用的控制模式。
- 0:空闲模式。
- 1:位置控制模式。
- 2:速度控制模式。
- 3:转矩控制模式。
- 名称:设定实时自动调整
- 单位:-
- 范围:0~6
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置调整的控制模式。
- 0:无效模式。
实时自动调整功能无效。
-
- 1:标准模式。
基本的模式(重视稳定性的模式),不进行可变载荷及摩擦补偿,也不使用增益切换。
-
- 2:定位模式。
重视定位的模式,水平轴等无可变载荷,摩擦也建议使用小滚珠螺杆驱动等机器。
速度、转矩控制模式与标准模式相同。
-
- 3:垂直轴模式。
除定位模式外,还补偿垂直轴等的可变载荷,便于抑制定位稳定时间的偏差。
转矩控制与标准模式相同。
-
- 4:摩擦补偿模式。
除垂直轴模式外,还通过摩擦较大的皮带驱动轴等,便于缩短定位稳定时间。
速度控制与垂直轴模式相同,转矩控制与标准模式相同。
-
- 5:载荷特性测试模式。
不变更现在所设置的参数,只进行载荷特性推断,与安装支持软件组合使用。
-
- 6:用户设定模式。
将实时自动调整功能的组合,用 Pr632 实时自动调整用户设定 实时自动调整用户设定进行详细设定。
由于控制模式的不同,部分功能可能无法使用。
- 名称:实时自动调整机器刚性设定
- 单位:-
- 范围:0~31
- 默认值:13
- 生效时间:立即生效
- 关联模式:ALL
- 说明:实时自动增益调整有效时的机械刚性设定。
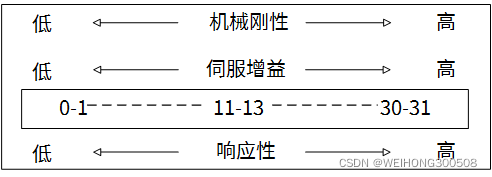
注意: 设定值变高,则速度应答性变高,伺服刚性也提高,但容易产生振动。在确认动作的同时,将低值变更为高值。
- 名称:惯量比
- 单位:%
- 范围:0~10000
- 默认值:250
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设定惯量比。 设置相应电机转动惯量的负载惯量比。
Pr004 = (负载惯量 / 转动惯量) * 100%
实时自动增益调整有效时,实时推断惯量比,每 30 分钟保存到 EEPROM 中。当再次接通电源时,驱动器以此数据作为初期值进行自动调整。
-
- 惯量比设置正确时,Pr101 第1速度环增益、Pr106 第2速度环增益 的设定单位为 Hz。
- Pr004 惯量比 与实际相比较大时,速度环增益单位将变大;与实际相比较小时,速度环增益单位将变小。
- 名称:电机每旋转1圈的指令脉冲数
- 单位:pulse
- 范围:0~16777216
- 默认值:0
- 生效时间:重启生效
- 关联模式:P
- 说明:设置相当于电机每旋转 1 圈的指令脉冲数。
本设定值为 0 时,Pr009 第 1 指令分倍频分子、Pr010 指令分倍频分母有效。
- 名称:第 1 指令分倍频分子
- 单位:-
- 范围:0~1073741824
- 默认值:1
- 生效时间:立即生效
- 关联模式:P
- 说明:设置针对指令脉冲输入的分倍频处理的分子。
Pr008 电机每旋转1圈的指令脉冲数为 0 时有效。
设定值为 0 时,编码器分辨率被设置为分子。
- 名称:指令分倍频分母
- 单位:-
- 范围:1~1073741824
- 默认值:1
- 生效时间:立即生效
- 关联模式:P
- 说明:设置针对指令脉冲输入的分倍频处理的分母。
Pr008 电机每旋转 1 圈的指令脉冲数为 0 时有效。
-
-
-
-
- Pr008、Pr009、Pr010的设定值组合关系
-
-
-
- 当 Pr008 设置为 1 ~ 2^20,Pr009 和 Pr010 无影响,设定值根据 Pr008 处理:

正在上传…重新上传取消
- 当 Pr008 和 Pr009 设置为 0,Pr010 设置为 1 ~ 2^30,设定值根据 Pr010 处理:

- 当 Pr008 设置为 0,Pr009 和 Pr010 设置为 1 ~ 2^30,设定值根据 Pr009 和 Pr010 处理:

- 名称:电机每旋转1圈的输出脉冲数
- 单位:pulse
- 范围:1~4194304
- 默认值:2500
- 生效时间:重启生效
- 关联模式:ALL
- 说明:将脉冲输出的分辨率用 OA、OB 各自旋转 1 圈的输出脉冲数设定。
因此,分倍频 4 倍后的脉冲输出分辨率如下所示:
每转程的脉冲输出分辨率 = Pr011 设定值 * 4
- 名称:脉冲输出逻辑反转
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置脉冲输出的 B 相逻辑和输出源。 通过本参数可对 B 相脉冲逻辑取反,改变 A 相脉冲和 B 相脉冲的相位关系。
- 0:电机编码器,B 相非反转。
- 1:电机编码器,B 相反转。
- 2:主轴编码器,B 相非反转。
- 3:主轴编码器,B 相反转。
B 相逻辑非反转:
-
- 正方向动作时:
-
- 负方向动作时:

B 相逻辑反转:
-
- 正方向动作时:

-
- 负方向动作时:
- 名称:第1转矩限制
- 单位:%
- 范围:0~500
- 默认值:300
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置电机输出第1转矩的限制值。 设置该参数的值限制电机的最大转矩,可减轻因机器咬合或冲撞等产生的损伤。 若将最大转矩限制在实际需要的范围内,可能发生因过冲而造成的过速度保护、因延迟接受命令而触发位置偏差过大保护等情况。
- 名称:位置偏差过大设置
- 单位:指令单位
- 范围:0~1073741824
- 默认值:35000000
- 生效时间:立即生效
- 关联模式:P
- 说明:使用指令单位(出厂时)设置位置偏差过大范围。
根据 Pr520 位置设定单位选择 设定单位和偏差计算方式。 本参数为 0 时,故障码 Err24.0 位置偏差过大保护 为无效。
参数 Pr014 设置值 >(电机最高转速 rpm/60)*(编码器分辨率/(位置环增益设置值/10))*电子齿轮比。
例:Pr100位置环增益默认值270,M2 总线驱动器电子齿轮比默认1:1,例如电机最高转速3000r/min,电机编码器分辨率是17Bit,所以推荐设置值:
Pr014=(3000/60)*(2^17/(270/10)*1*1.2=291271
因为电子齿轮比约 1:1,换算成圈数的话,约 2.22r,如果电机速度 60r/min 撞机的话,由于撞机后位置无法移动,约 3s 内会报位置偏差过大保护。
- 名称:绝对式编码器设定
- 单位:-
- 范围:0~4
- 默认值:2
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置绝对式编码器的使用方法。
- 0:作为绝对值编码器使用。
- 1:作为增量式编码器使用。
- 2:作为绝对值编码器使用,忽略多次旋转的计数器溢出。
- 3:厂家使用,请勿设置。
- 4:无限旋转绝对式模式。在绝对式系统(绝对式模式)下使用,可任意设置多圈计数的上限值。
- 名称:再生放电电阻外置选择
- 单位:-
- 范围:0~3
- 默认值:无内置电阻驱动器(不超过400W)默认值为 3,有内置电阻驱动器(大于 400W)默认值为 0。
- 生效时间:重启生效
- 关联模式:ALL
- 说明: 若要使用驱动器中的内置再生放电电阻或分离内置再生放电电阻,或设置外部再生放电电阻等时,需设置本参数。
- 0:使用内置电阻为再生放电电阻。再生处理电路动作,根据内置电阻(大约 1% 的负荷率)由再生放电电阻过载保护进行动作。
- 1:使用外置电阻为再生放电电阻。保护有:再生处理电路动作,再生放电电阻的动作率超过 10% 时,用故障码 Err18.0 再生过载保护 跳闸。
- 2:使用外置电阻为再生放电电阻。保护无:厂家使用,请勿设置。
- 3:不使用再生放电电阻。不使用再生处理电路及再生放电电阻过载保护动作,采用内置电容器处理全部的再生电力。
警告:
-
- 用外置再生放电电阻时,务必设置温度熔断器等外部保护。与再生放电电阻过载保护的有效 / 无效无关,再生放电电阻有可能出现异常发热,导致烧损。
- 勿碰触外置再生放电电阻。因为外置电阻呈高温状态,使用中注意安全,以免灼伤。
- 使用内置再生放电电阻时,请勿设置 0 以外的值。
- 名称:再生电阻散热系数
- 单位:%
- 范围:0~100
- 默认值:30
- 生效时间:重启生效
- 关联模式:ALL
- 说明:选择外置再生放电电阻时:根据电阻冷却条件设置:
- 自冷方式 (自然对流冷却)时:设定值不超过 30%。
- 强制风冷方式时:设定值不超过 50%。
- 名称:再生电阻容量
- 单位:W
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置再生电阻容量。
- 名称:再生电阻阻值
- 单位:Ω
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置再生电阻阻值。
-
-
- Pr018与Pr019的设定值组合关系
-
-
参数 Pr018 与 Pr019 设定值为 0 时,将使用推荐的再生电阻容量和阻值。
| 驱动器功率 | 再生电阻容量 | 阻值 |
| 400W | 200W | 40Ω |
| 750W | 400W | 40Ω |
| 1000W | 500W | 30Ω |
| 1500W | 800W | 20Ω |
| 2500W | 1200W | 20Ω |
| 3.0kW | 1000W | 50Ω |
| 5.0kW | 1800W | 40Ω |
若参数 Pr018 与 Pr019 设置值小于最小允许功率容量或阻值,则会发生 Err730再生电阻参数不匹配保护。
- 名称:电机编号
- 单位:-
- 范围:0~9999999
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机编号,仅在使用增量式编码器时有效,恢复出厂操作无影响:
- 0:电机参数开放 需设置参数:Pr323、Pr326、Pr327 及 Pr701 ~ Pr725。
- 1:厂家使用
- 2 ~ 9999999:厂家配套电机编号 电机参数根据编号自动设置。
若参数设置错误,可能导致驱动器及电机出现故障,第一次上电时请确认设定值是否正确。 若参数设定值超出 《配套电机编号表》 范围,则会发生 Err95.2 电机自动识别异常保护。
-
- [分类 1]增益调整
- 名称:第 1 位置环增益
- 单位:0.1/s
- 范围:0~30000
- 默认值:480
- 生效时间:立即生效
- 关联模式:P
- 说明:决定位置控制系统的响应性。
设定较大位置环增益值,可缩短伺服电机定位时间,但若设置过大可能引起振动。
- 名称:第 1 速度环增益
- 单位:0.1Hz
- 范围:1~32767
- 默认值:270
- 生效时间:立即生效
- 关联模式:ALL
- 说明:决定速度环响应性。
为加大位置环增益,提高伺服系统全体的响应性,必须加大速度环增益值的设置,但若设置过大则可能引起振动。
- 名称:第 1 速度环积分时间常数
- 单位:0.1ms
- 范围:1~10000
- 默认值:210
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置速度环积分时间常数。
设定值越小,停止时的偏差值更快接近于 0。设置为 9999 时将保持积分;设置为 10000 时则无积分效果。
- 名称:第 1 速度检测滤波器
- 单位:0.01ms
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:速度检测后,可设置低通滤波器(LPF)的时间常数。
设定值大则时间常数也大,虽可降低电机噪音,但响应性也会下降。通常使用出厂设定值 0。
- 名称:第 1 转矩滤波器
- 单位:0.01ms
- 范围:0~2500
- 默认值:84
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置插入转矩指令部分的一阶滞后滤波器时间常数。可控制因扭曲共振发生的振动。
第 2 增益的功能、内容与第 1 增益相同。一般固定在第 1 增益,通过手动调整第 1 增益的参数进行增益调整。
- 名称:第 2 位置环增益
- 单位:0.1/S
- 范围:0~30000
- 默认值:570
- 生效时间:立即生效
- 关联模式:P
- 说明:决定位置控制系统的响应性。
设置较大位置环增益值,可缩短定位时间,但若设置过大可能引起振动。
- 名称:第 2 速度环增益
- 单位:0.1Hz
- 范围:1~32767
- 默认值:270
- 生效时间:立即生效
- 关联模式:ALL
- 说明:决定速度环响应性。
为加大位置环增益,提高伺服系统全体的响应性,必须加大速度环增益值的设置,但若设置过大则可能引起振动。
- 名称:第 2 速度环积分时间常数
- 单位:0.1ms
- 范围:1~10000
- 默认值:10000
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置速度环积分时间常数。
设定值越小,停止时的偏差值更快接近于 0。设置为 9999 时将保持积分;设置为 10000 时则无积分效果。
- 名称:第 2 速度检测滤波器
- 单位:0.01ms
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设定值大则时间常数也大,虽可降低电机噪音,但响应性也会下降。通常使用出厂设定值 0。
- 名称:第 2 转矩滤波器
- 单位:0.01ms
- 范围:0~2500
- 默认值:84
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置插入转矩指令部分的一阶滞后滤波器时间常数。可控制因扭曲共振发生的振动。
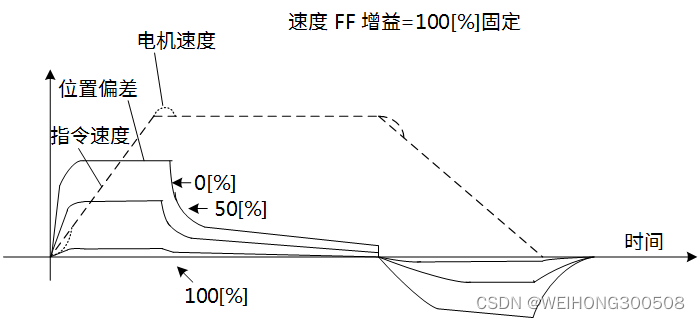
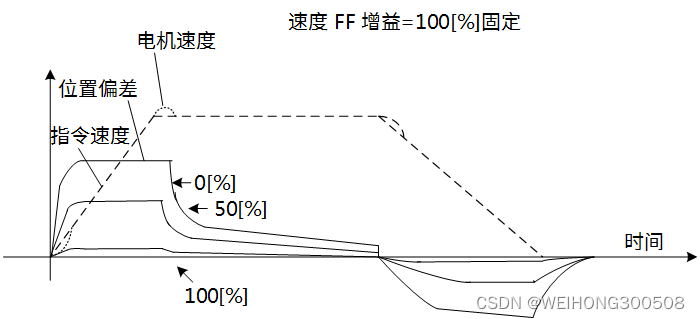
- 名称:速度前馈时间常数增益
- 单位:0.1%
- 范围:0~1000
- 默认值:300
- 生效时间:立即生效
- 关联模式:P
- 说明:在根据内部位置指令计算的速度控制指令中,把乘以本参数后的值加算到来自位置控制处理的速度指令。
- 名称:前馈滤波器时间常数滤波器
- 单位:0.01ms
- 范围:0~6400
- 默认值:200
- 生效时间:立即生效
- 关联模式:P
- 说明:设置速度前馈输入所需的一阶低通滤波器的时间常数。
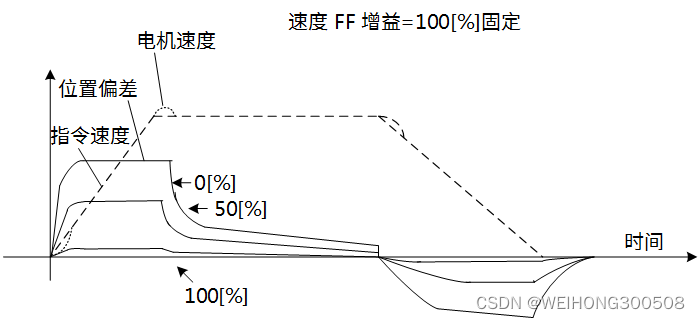
- 举例:在速度前馈滤波器设置为 50(0.5ms)的状态下,通过逐步提高速度前馈增益,使速度前馈变为有效。固定速度动作中的位置偏差与速度前馈增益的关系满足以下公式:

- 名称:转矩前馈增益
- 单位:0.1%
- 范围:0~1000
- 默认值:0
- 生效时间:立即生效
- 关联模式:P S
- 说明:在根据速度控制指令所计算的转矩指令中,把乘以本参数后的值加算到来自速度控制处理的转矩指令。 提高转矩前馈增益,则由于可将固定加减速时的位置偏差接近 0,所以在扰动转矩不工作的理想条件下的台形速度模式驱动时,可在全动作领域将位置偏差大致接近于 0。
- 名称:转矩前馈滤波器
- 单位:0.01ms
- 范围:0~6400
- 默认值:0
- 生效时间:立即生效
- 关联模式:P S
- 说明:设置转矩前馈输入所需的一阶低通滤波器的时间常数。 转矩前馈滤波器设置为 50(0.5ms)时,通过逐步提高转矩前馈增益,使转矩前馈变为有效。与速度前馈相同,若将转矩前馈滤波器的时间常数变大,会使加速度变化点的位置偏差变大。
- 举例:
- 使用转矩前馈时,需正确设置惯量比。沿用实时自动调整执行时的推定值,或将用机器各元素计算的惯量比设置到 Pr004 惯量比 中。
- 在转矩前馈滤波器设置为 50(0.5ms)程度的状态下,通过逐步提高转矩前馈增益,而使转矩前馈变为有效。
- 在无扰动转矩的理想工作状况下,给定速度指令为梯形时,通过提高转矩前馈增益,可使位置偏差减小到 0 左右。
- 举例:
注意: 实际上扰动转矩肯定存在,所以位置偏差不可能完全变为 0。
- 名称:第 2 增益设置
- 单位:-
- 范围:0~1
- 默认值:1
- 生效时间:立即生效
- 关联模式:ALL
- 说明:使用增益切换功能,设置为最合适调整的状态。
- 0:第 1 增益变为固定,根据增益切换输入(GAIN)将速度环路的动作切换到 PI 动作或 P 动作。
- GAIN 输入光电耦合器 OFF,切换到 PI 动作。
- GAIN 输入光电耦合器 ON,切换到 P 动作。 上述 GAIN 输入的逻辑设置为 a 接的情况,若为 b 接时 OFF / ON 相反。
- 1:第 1 增益 Pr100 ~ Pr104 和第 2 增益 Pr105 ~ Pr109 的增益切换为有效。
- 0:第 1 增益变为固定,根据增益切换输入(GAIN)将速度环路的动作切换到 PI 动作或 P 动作。
- 名称:位置控制切换模式
- 单位:-
- 范围:0~10
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 说明:位置控制时,设置增益切换的触发电路条件。
- 0:第 1 增益固定。
在第 1 增益 Pr100 ~ Pr104 中固定。
-
- 1:第 2 增益固定。
在第 2 增益 Pr105 ~ Pr109 中固定。
-
- 2:有增益切换输入。
增益切换输入(GAIN)打开时为第 1 增益。
增益切换输入(GAIN)连接到 COM- 时为第 2 增益。
增益切换输入(GAIN)无法分配到输入信号时,为第 1 增益固定。
-
- 3:转矩指令大。
在前一次第 1 增益中,转矩指令的绝对值超过(等级 + 磁滞)% 时,转移到第 2 增益。
在前一次第 2 增益中,转矩指令的绝对值不大于(等级 - 磁滞)% 的状态持续时间大于延迟时间时,返回到第 1 增益。
-
- 4:速度指令变化量大。
仅速度控制时有效。
在上次第 1 增益中,速度指令变化量的绝对值超过(等级 + 磁滞)10r/min/s 时,转移到第 2 增益。
在上次第 2 增益中,若速度指令变化量的绝对值不到(等级 - 磁滞)10r/min/s 时的状态持续时间,大于延迟时间,返回到第 1 增益。
速度控制之外,为第1增益固定。
-
- 5:速度指令大。
位置、速度控制时有效。
在上次第 1 增益中,速度指令的绝对值超过(等级 + 磁滞)r/min 时,转移到第 2 增益。
在上次第 2 增益中,若速度指令的绝对值不大于(等级 - 磁滞)r/min 时的状态持续时间,大于延迟时间,返回到第 1 增益。
-
- 6:位置偏差大。
位置控制时有效。
在上次第 1 增益中,位置偏差的绝对值超过(等级 + 磁滞)pulse 时,转移到第 2 增益。
在上次第 2 增益中,位置偏差的绝对值不到(等级 - 磁滞)pulse 的状态持续时间,大于延迟时间时,返回到第 1 增益。
等级、磁滞的单位为 pulse,在位置控制时用编码器分辨率设置。
-
- 7:有位置指令。
位置控制时有效。
在上次第 1 增益中,位置指令若不为 0,则转移到第 2 增益。
在上次第 2 增益中,位置指令为 0 的状态持续时间大于延迟时间时,返回到第 1 增益。
-
- 8:定位未完成。
位置控制时有效。
在上次第 1 增益中,若定位未完成,则转移到第 2 增益。
在上次第 2 增益中,定位已完成状态持续时间大于延迟时间时,返回到第 1 增益。
-
- 9:实际速度大。
位置控制时有效。
在上次第 1 增益中,实际速度的绝对值超过(等级 + 磁滞)r/min 时,转移到第 2 增益。
在上次第 2 增益中,实际速度的绝对值不到(等级 - 磁滞)r/min 的状态持续时间大于延迟时间时,返回到第 1 增益。
-
- 10:有位置指令和实际速度。
位置控制时有效。
在上次第 1 增益中,位置指令若不为 0,则转移到第 2 增益。
在上次第 2 增益中,位置指令为 0 的状态持续时间大于延迟时间,且实际速度的绝对值不到(等级 - 磁滞)r/min 时,返回到第 1 增益。
- 名称:位置控制切换延迟时间
- 单位:0.1ms
- 范围:0~10000
- 默认值:50
- 生效时间:立即生效
- 关联模式:P
- 说明:位置控制时,若 Pr115 位置控制切换模式 设置为 3、5 ~ 10,则本参数设置的是第 2 增益切换到第 1 增益时,触发电路检测到实际切换的时间。
- 名称:位置控制切换等级
- 单位:根据模式
- 范围:0~20000
- 默认值:50
- 生效时间:立即生效
- 关联模式:P
- 说明:位置控制模式下,设置 Pr115 位置控制切换模式 为 3、5、6、9、10 时的触发电路判定等级。单位根据切换条件变更。
注意: 设置时,需确保等级不小于磁滞。
- 名称:位置控制切换时磁滞
- 单位:根据模式
- 范围:0~20000
- 默认值:33
- 生效时间:立即生效
- 关联模式:P
- 说明:位置控制时,Pr115 位置控制切换模式 设置为 3、5、6、9、10 时的触发电路判定磁滞。
单位根据切换的模式有所不同。
注意: 等级小于磁滞时,系统内部重新设置为磁滞等于等级。
- 名称:位置增益切换时间
- 单位:0.1ms
- 范围:0~10000
- 默认值:33
- 生效时间:立即生效
- 关联模式:P
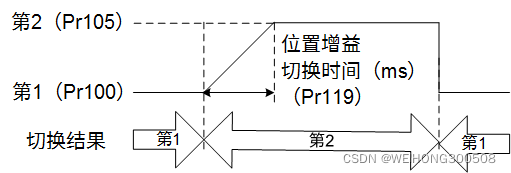
- 说明:位置控制时,若 Pr100 第 1 位置环增益 与 Pr105 第 2 位置环增益 的差较大,可抑制位置环增益的急剧增加。位置环增益在本参数设置的时间内不断增加。
关于位置增益切换时间:
-
- 位置控制时,通过设置 Pr119,可缓和位置环增益的急剧增加,减少由于增益切换时位置增益的急剧变化而引起的转矩变动及振动。
- 位置环增益变小时,不受本参数的设置影响而立即切换。
- 名称:速度控制切换模式
- 单位:-
- 范围:0~5
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:速度控制时,设置增益切换的触发电路条件。
设定值与切换条件关系如下:
-
- 0:第 1 增益固定
- 1:第 2 增益固定
- 2:用增益切换输入
- 3:转矩指令
- 4:速度指令变化量
- 5:指令速度大
- 名称:速度控制切换延迟时间
- 单位:0.1ms
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:速度控制时,若 Pr120 速度控制切换模式 设置为 3 ~ 5,则本参数设置的是第 2 增益切换到第 1 增益时,触发电路检测到实际切换的时间。
- 名称:速度控制切换等级
- 单位:根据模式
- 范围:0~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:速度控制时,Pr120 速度控制切换模式 设置为 3 ~ 5 时的触发电路判定等级。单位根据切换的模式有所不同。 设置时,需确保等级不小于磁滞。
- 名称:速度控制切换时滞后
- 单位:根据模式
- 范围:0~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:速度控制时,Pr120 速度控制切换模式 设置为 3 ~ 5 时的触发电路判定磁滞。单位根据切换的模式有所不同。
注意: 等级小于磁滞时,系统内部重新设置为磁滞等于等级。
- 名称:转矩控制切换模式
- 单位:-
- 范围:0~3
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:转矩控制时,设置增益切换的触发电路条件。
设定值与切换条件关系如下:
-
- 0:第 1 增益固定
- 1:第 2 增益固定
- 2:用增益切换输入
- 3:转矩指令
- 名称:转矩控制切换延迟时间
- 单位:0.1ms
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:转矩控制时,若 Pr124 转矩控制切换模式 设置为 3,则从第 2 增益切换到第 1 增益时,从触发电路检测到实际切换的时间。
- 名称:转矩控制切换等级
- 单位:根据模式
- 范围:0~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:转矩控制时,Pr124 转矩控制切换模式 设置为 3 时的触发电路判定等级。单位根据切换的模式而不同。
注意: 设置时,需确保等级不小于磁滞。
- 名称:转矩控制切换时滞后
- 单位:根据模式
- 范围:0~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:转矩控制时,Pr124 转矩控制切换模式 设置为 3 时的触发电路判定磁滞。单位根据切换的模式而不同。
注意: 等级小于磁滞时,系统内部重新设置为磁滞等于等级。
- 名称:自适应滤波器模式设定
- 单位:-
- 范围:0~4
- 默认值:0
- 生效时间:立即生效
- 关联模式:P S
- 说明:设置适应滤波器推定的共振频率数和推定后的动作。
- 0:适应滤波器无效。
第 3、4 陷波滤波器关联参数保持现状。
-
- 1:1 个适应滤波器变为有效。
第 3 陷波滤波器关联参数根据适应结果更新。
-
- 2:2 个适应滤波器变为有效。
第 3、4 陷波滤波器关联参数根据适应结果更新,第 1、2 陷波滤波器参数根据 iMotion 中的 FFT分析 波形图读取的第二共振点来设置。
-
- 3:测试共振频率,测试结果可用 iMotion 确认。
第 3、4 陷波滤波器关联参数保持现状的值。
-
- 4:第 3、4 陷波滤波器关联参数为无效且清除适应结果。
包含第 1 陷波频率、宽度选择和深度选择参数。
- 名称:第 1 陷波频率
- 单位:Hz
- 范围:50~5000
- 默认值:5000
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 1 共振控制陷波滤波器的频率。设定值定为 5000 时,陷波滤波器的功能无效。
- 名称:第 1 陷波宽度选择
- 单位:-
- 范围:0~20
- 默认值:2
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 1 共振控制陷波滤波器的幅宽。设定值增大时陷波宽度也增大,通常情况下使用出厂设定值。
- 名称:第 1 陷波深度选择
- 单位:-
- 范围:0~99
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设定第 1 共振控制陷波滤波器的陷波深度。设定值增大时陷波深度变浅,相位滞后变小。
包含第 2 陷波频率、宽度选择和深度选择参数。
- 名称:第 2 陷波频选择
- 单位:Hz
- 范围:50~5000
- 默认值:5000
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 2 共振控制陷波滤波器的频率。设定值为 5000 时,陷波滤波器的功能无效。
- 名称:第 2 陷波宽度选择
- 单位:-
- 范围:0~20
- 默认值:2
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 2 共振控制陷波滤波器的幅宽。设定值增大时陷波宽度也增大,通常情况下使用出厂设定值。
- 名称:第 2 陷波深度选择
- 单位:-
- 范围:0~99
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 2 共振控制陷波滤波器的陷波深度。设定值增大时陷波深度变浅,相位滞后变小。
包含第 3 陷波频率、宽度选择和深度选择参数。
系统自动设置时,每隔 30 分钟写入 EEPROM。重新打开电源时,该数据将作为初始值而进行处理。
- 名称:第 3 陷波频率
- 单位:Hz
- 范围:50~5000
- 默认值:5000
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 3 共振控制陷波滤波器的频率。设定值为 5000 时,陷波滤波器的功能无效。
- 名称:第 3 陷波宽度选择
- 单位:-
- 范围:0~20
- 默认值:2
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 3 共振控制陷波滤波器的幅宽。设定值增大时陷波宽度也增大,通常情况下使用出厂设定值。
- 名称:第 3 陷波深度选择
- 单位:-
- 范围:0~99
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 3 共振控制陷波滤波器的陷波深度。设定值增大时陷波深度变浅,相位滞后变小。
包含第 4 陷波频率、宽度选择和深度选择参数。
系统自动设置时,每隔 30 分钟写入 EEPROM。重新打开电源时,该数据将作为初始值而进行处理。
- 名称:第 4 陷波频率
- 单位:Hz
- 范围:50~5000
- 默认值:5000
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 4 共振控制陷波滤波器的频率。设定值定为 5000 时,陷波滤波器的功能无效。
- 名称:第 4 陷波宽度选择
- 单位:-
- 范围:0~20
- 默认值:2
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 4 共振控制陷波滤波器的幅宽。设定值增大时陷波宽度也增大,通常情况下使用出厂设定值。
- 名称:第 4 陷波深度选择
- 单位:-
- 范围:0~99
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置第 4 共振控制陷波滤波器的陷波深度。设定值增大时陷波深度变浅,相位滞后变小。
设置第 1 减振的频率和阻尼比。
- 名称:第 1 减振阻尼比
- 单位:0.001
- 范围:0~500
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
设置第 2 减振的频率和阻尼比。
- 名称:第 2 减振阻尼比
- 单位:0.001
- 范围:0~500
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
设置第 3 减振的频率和阻尼比。
- 名称:第 3 减振阻尼比
- 单位:0.001
- 范围:0~500
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
设置第 4 减振的频率和阻尼比。
- 名称:第 4 减振阻尼比
- 单位:0.001
- 范围:0~500
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 名称:位置指令平滑滤波器
- 单位:0.1ms
- 范围:0~32767
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
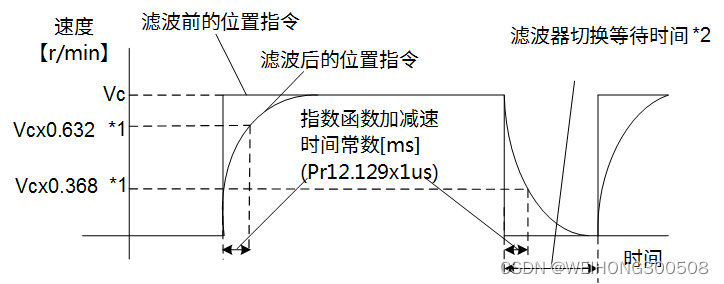
- 说明:设置针对位置指令的一阶低通滤波器的时间常数。
针对目标速度 Vc 的方形波指令,设置一阶低通滤波器的时间常数。
-
- 1:针对(设定值 × 0.1ms),实际的滤波器时间常数不到 100ms 时,绝对误差为最大 0.2ms;20ms 以上时,相对误差为最大 0.1%。
- 2:在定位结束输出期间内,当每个控制周期的指令脉冲,从 0 变化到不为 0 的状态时进行 Pr222 的切换。
注意: 特别是在将滤波器时间常数变小且将定位范围设置较大时,上述阶段中若在滤波器内留有滞留脉冲,即滤波器前位置指令减去滤波器后位置指令的值用时间积分的面积,则切换后为了立即将这些滞留脉冲排出并返回原来的位置,可能暂时使用高于原来指令的速度运行电机。
-
- 3:变更 Pr222 后到真正内部计算为止,可能出现延迟,若此期间内 2 的切换时机到来,变更可能被保留。
- 名称:位置指令 FIR 滤波器
- 单位:0.1ms
- 范围:0~5120
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
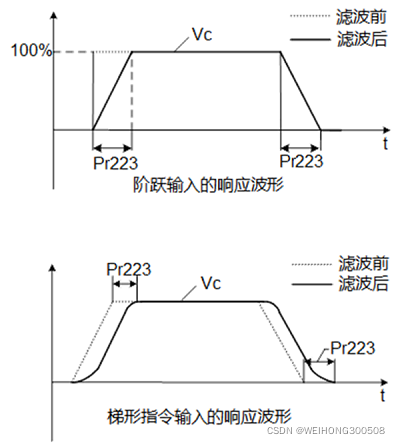
- 说明:设置针对位置指令的 FIR 滤波器的时间常数。
针对目标速度 Vc 的方向波指令,设置到达 Vc 的时间。
- 名称:速度设置内外切换
- 单位:-
- 范围:0~4
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:
- 0:总线通讯指令
- 1:内部速度设置第1速 Pr304
- 2:内部使用
- 3:内部使用
- 名称:速度指令方向指定选择
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:选择速度指令的正、负方向的指定方法。
| 设定值 | 内部速度设定值(第 1 速 ~ 8 速) | 速度指令符号选择(VC-SIGN) | 速度指令方向 |
| 0 | + | 无影响 | 正方向 |
| 0 | - | 无影响 | 负方向 |
| 1 | 符号无影响 | OFF | 正方向 |
| 1 | 符号无影响 | ON | 负方向 |
- 名称:速度指令输入反转
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设定附加在非内部速度指令的极性。
- 0:非反转
- 1:反转
驱动器设定为速度控制模式,与外部定位装置构成伺服驱动系统时,若定位装置的速度指令信号极性与本参数的极性设定不一致时,电机将异常动作。
包含速度设置第 1 速 ~ 第 8 速。
- 名称:速度设置第 2 速
- 单位:r/min
- 范围:-20000~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置内部指令速度的第 2 速。
- 名称:速度设置第 3 速
- 单位:r/min
- 范围:-20000~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置内部指令速度的第 3 速。
- 名称:速度设置第 4 速
- 单位:r/min
- 范围:-20000~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置内部指令速度的第 4 速。
- 名称:速度设置第 5 速
- 单位:r/min
- 范围:-20000~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置内部指令速度的第 5 速。
- 名称:速度设置第 6 速
- 单位:r/min
- 范围:-20000~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置内部指令速度的第 6 速。
- 名称:速度设置第 7 速
- 单位:r/min
- 范围:-20000~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置内部指令速度的第 7 速。
- 名称:速度设置第 8 速
- 单位:r/min
- 范围:-20000~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置内部指令速度的第 8 速。
- 名称:加速时间设置
- 单位:ms/(1000r/min)
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置针对内部速度指令的加速处理时间。
- 名称:减速时间设置
- 单位:ms/(1000r/min)
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置针对内部速度指令的减速处理时间。
-
-
- Pr312与Pr313的设定值组合关系
-
-
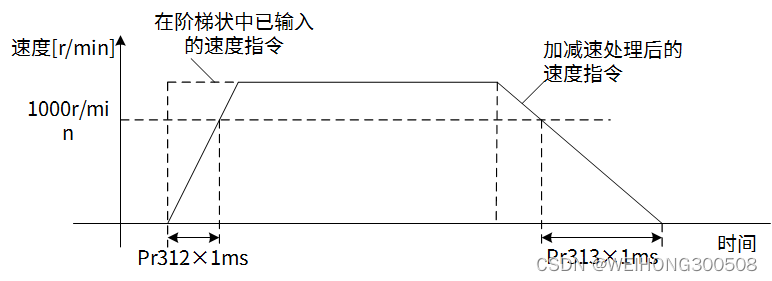
设置针对速度指令输入的加减速处理时间。
在已输入阶梯状速度指令的情况时:
- 将速度指令到达 1000r/min 为止的时间设置为 Pr312。
- 将速度指令从 1000r/min 到达 0r/min 的时间设定为 Pr313。
若速度指令的目标值为 Vc[r/min],则加减速所需的时间可用下列公式计算:
- 加速时间[ms]= Vc/1000×Pr312×1ms
- 减速时间[ms]= Vc/1000×Pr313×1ms
- 名称:S 字加减速设置
- 单位:ms
- 范围:0~1000
- 默认值:0
- 生效时间:立即生效
- 关联模式:S
- 说明:设置针对速度指令输入的 S 字加减速处理时间。
针对 Pr312 加速时间设置、Pr313 减速时间设置 所设定的加减速时间,本参数设定的是以其加减速拐点为中心的时间幅度里的 S 字部时间。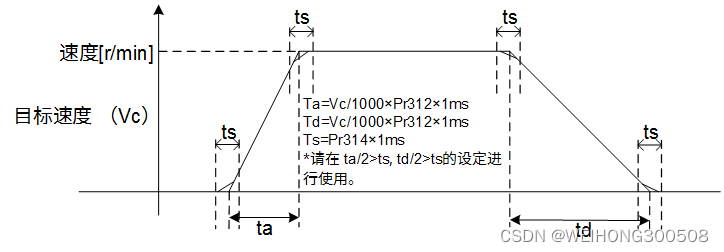
- 名称:零速箝位机能选择
- 单位:-
- 范围:0~3
- 默认值:0
- 生效时间:立即生效
- 关联模式:S T
- 说明:设置零速箝位输入功能。
- 0:无效,零速箝位输入被忽略。
- 1:零速箝位(ZEROSPD)输入信号 ON 时,强制性地将速度指令置于 0。
- 2:零速箝位(ZEROSPD)输入信号 ON 时,强制性地将速度指令置于 0,且电机实际速度变为 Pr316 零速箝位等级 值以下后切换到位置控制并在该位置伺服锁定。
- 3:零速箝位(ZEROSPD)输入信号 ON 时,且速度指令小于(Pr316 - 10r/min)的值后,切换到位置控制且在该位置伺服锁定。
- 名称:转矩指令选择
- 单位:-
- 范围:0~2
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:选择转矩指令和速度限制值输入。
| 值 | 转矩指令输入 | 速度限制输 |
| 0 | 总线通讯指令 | 参数值(Pr321) |
| 1 | 总线通讯指令 | 总线通讯指令 |
| 2 | 参数值(Pr601) | 参数值(Pr321、Pr322) |
- 名称:速度限制值 1
- 单位:r/min
- 范围:0~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:设定转矩控制时的速度限制值。在转矩控制中用速度限制值控制速度不超过所设置的值。
Pr317 设定值为 2 时为正方向指令的速度限制值。
- 名称:速度限制值 2
- 单位:r/min
- 范围:0~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:Pr317 设定值为 2 时负方向指令的速度限制值。
-
-
- Pr315、Pr317、Pr321、Pr322的设定值组合关系
-
-
各参数设定值与零速箝位及速度限制值的关系见下表:
- 设定组合 1 设定值与 ZEROSPD 输入功能关系如下:
- Pr315:0
- Pr317:0
- Pr321:0 ~ 20000
- Pr322:无影响
- 零速箝位(ZEROSPD):无影响
- 速度限制值:Pr321 设定值
- 设定组合 2 设定值与 ZEROSPD 输入功能关系如下:
- Pr315:1 ~ 3
- Pr317:0
- Pr321:0 ~ 20000
- Pr322:无影响
- 零速箝位(ZEROSPD):OFF
- 速度限制值:Pr321 设定值
- 设定组合 3 设定值与 ZEROSPD 输入功能关系如下:
- Pr315:0
- Pr317:0
- Pr321:0 ~ 20000
- Pr322:无影响
- 零速箝位(ZEROSPD):ON
- 速度限制值:0
- 设定组合 4 设定值与 ZEROSPD 输入功能关系如下:
- Pr315:0
- Pr317:2
- Pr321:0 ~ 20000
- Pr322:0 ~ 20000
- 零速箝位(ZEROSPD):无影响
- 速度限制值:Pr321 / Pr322 设定值
- 设定组合 5 设定值与 ZEROSPD 输入功能关系如下:
- Pr315:1 ~ 3
- Pr317:2
- Pr321:0 ~ 20000
- Pr322:0 ~ 20000
- 零速箝位(ZEROSPD):OFF
- 速度限制值:Pr321 / Pr322 设定值
- 设定组合 6 设定值与 ZEROSPD 输入功能关系如下:
- Pr315:1 ~ 3
- Pr317:2
- Pr321:0 ~ 20000
- Pr322:0 ~ 20000
- 零速箝位(ZEROSPD):ON
- 速度限制值:0
- 名称:零速箝位等级
- 单位:r/min
- 范围:10~20000
- 默认值:30
- 生效时间:立即生效
- 关联模式:S T
- 说明:Pr315 设定值为 2 或 3 时,Pr316 用于设置切换到位置控制的条件。
Pr315 设定值为 3 时,在检测中使用 10r/min 的磁滞。
- 名称:转矩指令方向指定选择
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:选择转矩指令正、负方向的指定方法。
- 0:用转矩指令符号指定方向。
转矩指令输入加号 + 指定正方向,减号 - 指定负方向。
-
- 1:用转矩指令符号选择(TC-SIGN)指定方向。
- 名称:转矩指令输入增益
- 单位:0.1V/100%
- 范围:10~100
- 默认值:30
- 生效时间:立即生效
- 关联模式:T
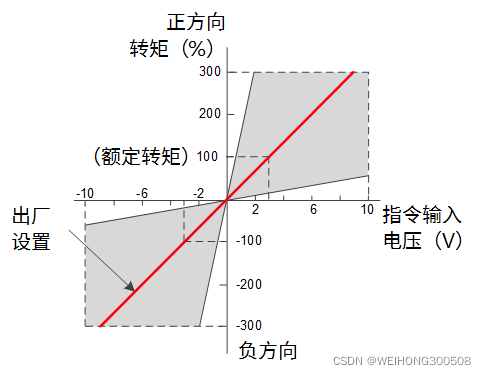
- 说明:设置从施加在模拟转矩指令(T-REF)的电压 V 到转矩指令 % 的转换增益。
设定值单位为 0.1V/100%,则出厂设定值 30 表示 3V/100%。
- 名称:转矩指令输入反转
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:设置施加在模拟转矩指令(T-REF)的电压极性。
- 0:非反转。正电压:正方向;负电压:负方向 。
- 1:反转。正电压:负方向;负电压:正方向。
- 名称:电机编码器类型选择
- 单位:-
- 范围:0~9
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:选择反馈编码器的类型。
- 0:AB 相输出型
- 1:正弦输出型
- 2:厂家使用(串行通讯旋转型)
- 3:多摩川单圈绝对式(串行通讯旋转型)
- 4:多摩川多圈绝对式(串行通讯旋转型)
- 5:松下增量式(串行通讯旋转型)
- 6:松下多圈绝对式(串行通讯旋转型)
- 7:安川 5 绝对式(串行通讯旋转型)
- 8:安川 5 增量式(串行通讯旋转型)
- 9:尼康绝对式(串行通讯旋转型)
注意: 若连接的编码器类型与设定值不一致时,因状况不同会发生以下错误:
-
- Err21.0 编码器通信断线异常。
- Err55.0 与 Err55.2 的 A / B相 / Z相接线异常保护。
- 名称:电机相序 & CS 方向反转
- 单位:-
- 范围:0~3
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机相序和 CS 信号的方向反转。可通过电机旋转自学习获得。
| 设定值 | 电机相序 | CS信号 |
| 0 | 非反转 | 非反转 |
| 1 | 反转 | 非反转 |
| 2 | 非反转 | 反转 |
| 3 | 反转 | 反转 |
CS 信号的逻辑设置仅在选择 CS 信号方式 Pr724 磁极检出方式选择 设置为 1 有效。
- 名称:电机编码器 Z 相断线检测无效
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置使用 AB 相输出型的反馈编码器时,Z 相断线检测的有效 / 无效。
- 0:有效
- 1:无效
- 名称:正弦编码器细分数
- 单位:-
- 范围:0~4096
- 默认值:256
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设定正弦编码器细分数。
- 名称:正弦编码器 A 相直流偏置
- 单位:-
- 范围:0~4095
- 默认值:2047
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设定正弦编码器 A 相直流偏置。
- 名称:正弦编码器 B 相直流偏置
- 单位:-
- 范围:0~4095
- 默认值:2047
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设定正弦编码器 B 相直流偏置。
- 名称:正弦编码器 AB 相增益比
- 单位:-
- 范围:0~8192
- 默认值:4096
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设定正弦编码器 AB 相增益比。
- 名称:SI1 输入选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:002E2E2Eh(3026478)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SI1 输入的功能分配。
- 名称:SI2 输入选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00818181h(8487297)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SI2 输入的功能分配。
- 名称:SI3 输入选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00828282h(8553090)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SI3 输入的功能分配。
- 名称:SI4 输入选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00222222h(2236962)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SI4 输入的功能分配。
- 名称:SI5 输入选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00202020h(2105376)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SI5 输入的功能分配。
- 名称:SI6 输入选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00212121h(2171169)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SI6 输入的功能分配。
- 名称:SI7 输入选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:002B2B2Bh(2829099)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SI7 输入的功能分配。
参数以 16 进制进行设置,显示面板上是以 10 进位表示。 16 进制表示后,如下所示设置各控制模式,在(X X)部分设置功能编号:
0 0 − − − − X X h:位置控制
0 0 − − X X − − h:速度控制
0 0 X X − − − − h:转矩控制
输入信号引脚分配请参见下表,信号极性的设定也包含在设定值内(- 表示不可设置):
| 信号 | a接 | b接 | 始终有效 | 始终无效 |
| 无效(-) | 00h | - | - | - |
| 正向驱动禁止输入(POT) | 01h | 81h | 41h | C1h |
| 负向驱动禁止输入(NOT) | 02h | 82h | 42h | C2h |
| 警报清除(A-CLR ) | 04h | - | - | C4h |
| 强制报警输入(E-STOP) | 14h | 94h | 54h | D4h |
| 减速限制切换输入(HOME) | 22h | A2h | 62h | E2h |
| 外部闩锁输入1(EXT1) | 20h | A0h | 60h | E0h |
| 外部闩锁输入2(EXT2) | 21h | A1h | 61h | E1h |
| 通用输入(GP) | 2Eh | AEh | 6Eh | EEh |
注意:
- 请勿设置为上表之外的设定值。
- 相同功能不可分配到多个引脚上,否则发生 Err33.0 I / F 输入重复分配异常 1 保护。
- 注意前面板显示为 10 进位表示。
- 分配 EXT1、EXT2、EXT3 这三种信号须所有模式都设定,否则发生 Err33.0 I / F 输入重复分配异常 2。
- 名称:SO1 输出选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00010101h(65793)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SO1 输出的功能分配。
- 名称:SO2 输出选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00030303h(197379)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SO2 输出的功能分配。
- 名称:SO3 输出选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00000004h(4)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SO3 输出的功能分配。
- 名称:SO4 输出选择
- 单位:-
- 范围:0~00FFFFFFh
- 默认值:00070707h(460551)
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 SO4 输出的功能分配。
参数用 16 进制进行设置,面板显示以 10 进制表示。 16 进制表示后,如下所示设置各控制模式,在(X X)部分设置功能编号:
0 0 − − − − X X h:位置控制
0 0 − − X X − − h:速度控制
0 0 X X − − − − h:转矩控制
输出信号引脚分配参见下表,信号极性的设置也包含在设定值内:
| 信号 | 符号 | a 接 | b 接 |
| 无效 | - | 00h | 80h |
| 伺服报警输出 | ALM | 81h | 01h |
| 伺服准备输出 | S-RDY | 02h | 82h |
| 外部制动器解除信号 | BRK-OFF | 03h | 83h |
| 定位完成 | INP | 04h | 84h |
| 速度到达输出 | AT-SPPED | 05h | 85h |
| 转矩限制中信号输出 | TLC | 06h | 86h |
| 零速箝位检测信号 | ZSP | 07h | 87h |
| 速度一致输出 | V-COIN | 08h | 88h |
| 警告输出 1 | WARN1 | 09h | 89h |
| 警告输出 2 | WARN2 | 0Ah | 8Ah |
| 位置指令有无输出 | P-CMD | 0Bh | 8Bh |
| 定位完成 2 | INP2 | 0Ch | 8Ch |
| 速度限制中输出 | V-LIMIT | 0Dh | 8Dh |
| 警报属性输出 | ALM_ATB | 0Eh | 8Eh |
| 速度指令有无输出 | V-CMD | 0Fh | 8Fh |
注意:
- 输出信号可将相同功能分配到复数信号。
- SO1 输出为 ALM 输出固定,设置为其它则会发生 Err33.4 I / F 输出功能号码异常。
- 设置为无效的控制输入引线,保持输出晶体管 OFF 状态。
- 请勿设置上表之外的设定值。
- 注意前面板为 10 进位表示。
- 名称:定位结束范围
- 单位:指令单位
- 范围:0~262144
- 默认值:800
- 生效时间:立即生效
- 关联模式:P
- 说明:设置定位完成信号(INP1)输出的位置偏差时机。 出厂时的设定单位为指令单位,但可用 Pr520 位置设定单位选择 变更为编码器单位,此时 Pr014 位置偏差过大设置 位置偏差过大设置的单位也一并变更。
- 名称:定位结束输出设置
- 单位:-
- 范围:0~3
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 说明:选择定位完成信号(INP1)的输出条件。
- 0:位置偏差在 Pr430 定位结束范围 设定值以下时接通。
- 1:无位置指令时,且位置偏差在 Pr430 设定值以下时接通。
- 2:无位置指令时,且零速度检测信号接通,位置偏差在 Pr430 设定值以下时接通。
- 3:无位置指令,且位置偏差为 Pr430 设定值以下时置于 ON。直至 Pr432 INP保持时间 为止保持 ON 的状态。经过 INP 保持时间后,根据此时的位置指令及位置偏差的状况,将 INP 输出置于 ON/OFF。
- 名称:INP 保持时间
- 单位:1ms
- 范围:0~30000
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 说明:设置 Pr431 定位结束输出设置 为 3 时的保持时间。
- 0:保持时间变为无限大,到接收下个位置指令为止,继续 ON 状态。
- 1 ~ 30000:仅设定值继续 ON 状态。但若在保持中若接收到位置指令,则变为 OFF 状态。
- 名称:零速度
- 单位:r/min
- 范围:10~20000
- 默认值:50
- 生效时间:立即生效
- 关联模式:ALL
- 说明:电机速度比本参数的设置速度低时输出零速度检测信号(ZSP)。
其设置与电机旋转方向无关,向正 / 负两个方向作用。且有 10(r/min)的滞后。
- 名称:速度一致幅度
- 单位:r/min
- 范围:10~20000
- 默认值:50
- 生效时间:立即生效
- 关联模式:ALL
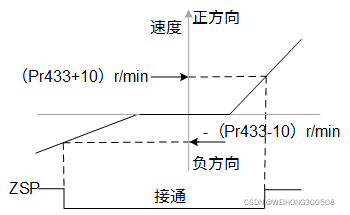
- 说明:设置速度一致输出(V-COIN)的检测时机。
若速度指令与电机速度的差小于本设定值,则输出速度一致输出(V-COIN)。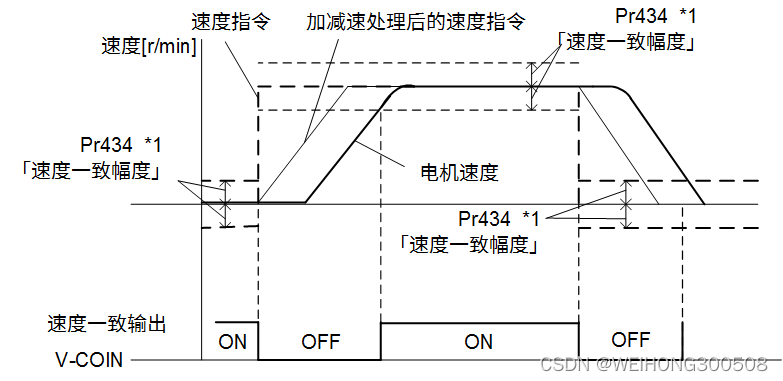
-
- 1 检测使用 10r/min 的磁滞,速度一致检测的实际检测幅度如上图所示。
- 速度一致输出 OFF 变为 ON 的条件:速度偏差 <(Pr434-10)r/min
- 速度一致输出 ON 变为 OFF的条件:速度偏差 >(Pr434+10)r/min
- 名称:到达速度
- 单位:r/min
- 范围:10~20000
- 默认值:1000
- 生效时间:立即生效
- 关联模式:S T
- 说明:设置速度到达输出(AT-SPEED)的检测时机。
电机速度超过本设定值时,输出速度到达输出(AT-SPEED)。
检测使用 10r/min 的磁滞。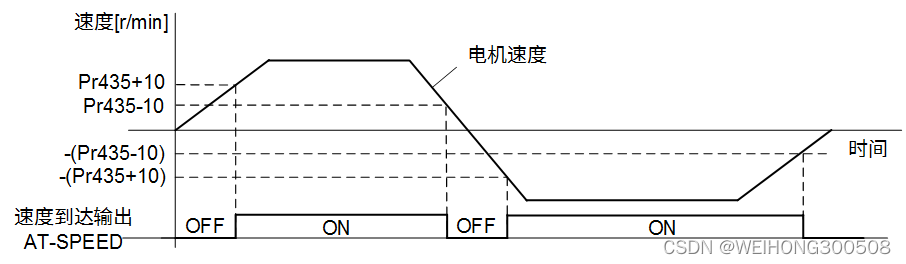
- 名称:停止时机械制动器动作设置
- 单位:ms
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
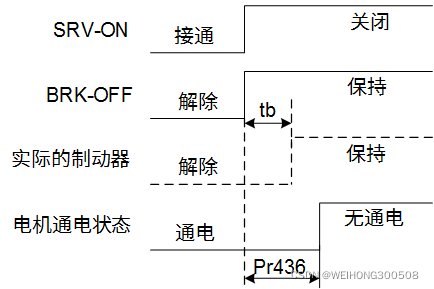
- 说明:电机停止中当伺服关闭时,设置制动器解除信号(BRK-OFF)关闭(制动器保持)后到电机无通电(伺服自由)为止的时间。
-
- 该参数可防止因制动器的相应延时(tb)引起的电机(工件)微小移动/落下。
- Pr436 的设置不超过 tb。
- 实际制动器动作后,设置为伺服使能关闭状态。
- 名称:动作时机械制动器动作设置
- 单位:ms
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
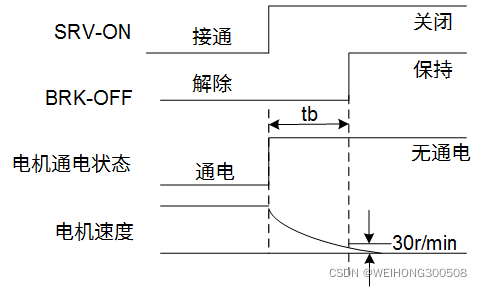
- 说明:电机旋转中伺服关闭时,从检测伺服接通输入信号(SRV-ON)的关闭状态到外部制动器解除信号(BRK-OFF)关闭为止的时间设置。
-
- 该参数设置是为了防止电机旋转导致制动器劣化。
- 在伺服关闭状态下,SRV-ON 关闭到电机旋转速度下降至低于 30r/min 的时间若大于 Pr437 设置值,则 BRK-OFF 信号按 Pr437 设置的值动作;若小于 Pr437 设置值,则 BRK-OFF 信号按电机旋转速度下降至低于 30r/min 的时间动作。
- 上图的时间 tb,为 Pr437 的设置时间和电机旋转速度下降至 30r/min 以下的时间中较小的时间值。
- 名称:制动器解除速度设定
- 单位:r/min
- 范围:30~3000
- 默认值:30
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置动作时机械制动器输出判定的速度时机。
- 名称:警告输出选择 1
- 单位:-
- 范围:0~16
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:用警告输出 1 选择输出警告的种类。
- 名称:警告输出选择 2
- 单位:-
- 范围:0~16
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:用警告输出 2 选择输出警告的种类。
- 0:- 所有警告的 OR 输出。
- 1:超载警告 负载率保护等级的 85% 以上。
- 2:过再生警告 再生负载率等级的 85% 以上。
- 3:电池警告 电池电压 3.2V 以下。
- 4:风扇警告 风扇停止状态持续 1 秒钟。
- 5:编码器通讯警告 连续发生编码器通讯异常的次数超过规定值。
- 6:编码器过热警告 检测出编码器过热警告。
- 7:振动检测警告 检测出振动状态。
- 8:注册时间到期 驱动器注册时间小于 24 小时。
- 9:光栅尺异常警告 反馈光栅尺检测出警告。
- 10:光栅尺通讯警告 反馈光栅尺通讯异常的连续发生次数超过规定值。
- 11:MECHATROLINK 数据设定警告 参数编号、范围、参数大小超过规定值。
- 12:MECHATROLINK 未支持命令警告 接收到未支持命令。
- 13:MECHATROLINK 未满足命令执行条件警告 命令运行在不支持的层、不满足命令执行条件。
- 14 ~ 16:内部使用。
- 名称:第 2 定位结束范围
- 单位:指令单位
- 范围:0~4191304
- 默认值:800
- 生效时间:立即生效
- 关联模式:P
- 说明:设置定位完成信号 2(INP2)输出的位置偏差条件。
INP2 不受 Pr431 定位结束输出设置 影响,位置偏差小于本设定值时输出 ON。
注意: 设定单位和偏差计算方式是根据 Pr520 位置设定单位选择 位置设定单位选择设置的。
- 名称:标准位置模式直线加速常数
- 单位:10000 指令单位 / s^2
- 范围:1~20971520
- 默认值:100
- 生效时间:立即生效
- 关联模式:P
- 说明:设置标准位置模式位置控制时的加速度。
务必在动作启动前设置。
- 名称:标准位置模式直线减速常数
- 单位:10000 指令单位 / s^2
- 范围:1~20971520
- 默认值:100
- 生效时间:立即生效
- 关联模式:P
- 说明:设置标准位置模式位置控制时的减速度。
务必在动作启动前设置。
- 名称:机械旋转一圈指令脉冲数
- 单位:指令单位
- 范围:1~1073741823
- 默认值:4096
- 生效时间:重启生效
- 关联模式:P
- 说明:机械旋转一圈指令脉冲数 = 编码器分辨率 × (电子齿轮比分母 / 电子齿轮比分子) × 减速比。
- 名称:定向角度设定
- 单位:0.01°
- 范围:0~36000
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 说明:设置机械定向角度。
- 名称:外部定位最终移动距离
- 单位:指令单位
- 范围:-1073741823~1073741823
- 默认值:100
- 生效时间:立即生效
- 关联模式:P
- 说明:设置外部输入定位信号后的最终移动距离。
- 名称:选购件监控1选择
- 单位:-
- 范围:0~65535
- 默认值:0
- 生效时间:立即生效
- 关联模式:P S T
- 说明:选择参数 Pr447 指定的监视数据。
- 名称:选购件监控2选择
- 单位:-
- 范围:0~65535
- 默认值:0
- 生效时间:立即生效
- 关联模式:P S T
- 说明:选择参数 Pr448 指定的监视数据。
通过参数 Pr447 / Pr448 选择监视的项目:
- 0x0:反馈速度(1000000H/检出速度)
- 0x1:指令速度(1000000H/检出速度)
- 0x2:指令转矩(1000000H/最大转矩)
- 0x3:位置偏差(指令单位)
- 0xA:机械坐标系中的反馈位置(低32bit): (指令单位)
- 0xB:机械坐标系中的反馈位置(高32bit): (指令单位)
- 0x10:反馈速度(r/min)
- 0x11:速度指令(r/min)
- 0x12:转矩指令(%)
- 0x16:输出信号
- 0x17:位置指令速度(r/min)
- 0x18:位置偏差(指令单位)
- 0x19:累积转矩负载率(%)
- 0x1A:再生负载率(%)
- 0x1C:位置指令(指令单位)
- 0x1D:反馈脉冲(编码器单位)
- 0x23:初始多圈数据(Rev)
- 0x24:初始增量数据(Pulse)
- 0x33:指令位置(高32位)(指令单位)
- 0x34:机械坐标系反馈闩锁位置(高32位)(指令单位)
- 0x80:反馈闩锁位置LPOS前次值(Pulse)
- 名称:功能选择应用开关 2
- 单位:-
- 范围:-2147483647~2147483647
- 默认值:0
- 生效时间:重启生效
- 关联模式:P
- 说明:用 bit 单位进行各功能的设置。
- 0:将 MECHATROLINK 指令中的 P_TLIM、N_TLIM 作为转矩限制值。0:无效;1:有效。
- 1:将 MECHATROLINK 指令中的 TFF 作为转矩前馈输入。0:无效;1:有效。
- 2:厂家使用。固定为 0。
- 3:定位模式。0:无效;1:有效。
- 4:厂家使用。固定为 0。
- 5:厂家使用。固定为 0。
- 6 ~ 31:厂家使用。固定为 0。
- 名称:第 2 指令分倍频分子
- 单位:-
- 范围:0~1073741824
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 说明:设置针对指令脉冲输入的分倍频处理的第 2 分子。
- 名称:第 3 指令分倍频分子
- 单位:-
- 范围:0~1073741824
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 说明:设置针对指令脉冲输入的分倍频处理的第 3 分子。
- 名称:第 4 指令分倍频分子
- 单位:-
- 范围:0~1073741824
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 说明:设置针对指令脉冲输入的分倍频处理的第 4 分子。
- 名称:脉冲输出分频分母
- 单位:-
- 范围:0~16777216
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:用于每旋转1圈的输出脉冲数不为整数时。
设定值不为 0。
可将 Pr011 电机每旋转 1 圈的输出脉冲数 设定值作为分频分子、Pr503 脉冲输出分频分母 设定值作为分频分母比进行设置。
所以上位端用 4 倍频处理进行脉冲计数时:
每旋转1次的脉冲输出分辨率 = (Pr011 设定值 / Pr503 设定值)* 编码器分辨率
- 名称:驱动禁止输入设定
- 单位:-
- 范围:0~2
- 默认值:1
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置驱动禁止输入(POT、NOT)输入的动作。
- 0:POT 输入正方向驱动禁止动作,NOT 输入负方向驱动禁止动作。
- 1:POT、NOT 无效。
- 2:POT 或 NOT 任何单方的输入,发生 Err38.0。
- 名称:驱动禁止时顺序设置
- 单位:-
- 范围:0~2
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 Pr504 驱动禁止输入设定 为 0 时驱动禁止输入(POT、NOT)输入后的减速中、停止后的状态。
| 设定值 | 减速中 | 停止后 | 偏差计数器内容 |
| 0 | 动态制动器动作 | 驱动禁止方向中转矩指令 = 0 | 保持 |
| 1 | 驱动禁止方向中转矩指令 = 0 | 驱动禁止方向中转矩指令 = 0 | 保持 |
| 2 | 保持 | 驱动禁止方向中转矩指令 = 0 | 在减速前后清除 |
- 名称:伺服关闭时顺序设置
- 单位:-
- 范围:0~9
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置伺服切断后的减速中、停止后的状态。
| 设定值 | 减速中 | 停止后 | 位置偏差 |
| 0 | DB 动作 | DB 动作 | 清除 |
| 1 | 空转(DB OFF) | DB动作 | 清除 |
| 2 | DB 动作 | 空转(DB OFF) | 清除 |
| 3 | 空转(DB OFF) | 空转(DB OFF) | 清除 |
| 4 | DB 动作 | DB动作 | 清除 |
| 5 | 空转(DB OFF) | DB 动作 | 清除 |
| 6 | DB 动作 | 空转(DB OFF) | 清除 |
| 7 | 空转(DB OFF) | 空转(DB OFF) | 清除 |
| 8 | 立即停止 | DB 动作 | 清除 |
| 9 | 立即停止 | 空转(DB OFF) | 清除 |
-
- 减速中:电机从当前动作状态到 30r/min 以下速度的区间。若电机速度低于 30r/min,且在停止后变化,则滞后不受电机速度影响而依照停止后的状态。
- 动态制动器(DB):通过使电机的电气回路短路来紧急停止伺服电机的一种方法。动态制动回路内置于伺服单元内。
- 清除:位置偏差始终保持清零状态。
- 立即停止:在伺服接通状态下,使控制功能由工作状态变为立即停止。此时的转矩指令值被 Pr511 立即停止时转矩设定 限制。
注意: 伺服切断中若出错,则依照 Pr510 警报时顺序设定 进行动作。若伺服切断中为主电源切断状态,则依照 Pr507 主电源关闭时顺序设置 进行动作。
- 名称:主电源关闭时顺序设置
- 单位:-
- 范围:0~9
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置主电源切断后的减速中、停止后的状态。
Pr507 的设定值与动作、偏差计数器的处理关系和 Pr506 伺服关闭时顺序设置 相同。
若在切断主电源的状态下出错,则依照 Pr510 警报时顺序设定 动作。 若在伺服接通状态切断主电源,则因为 Pr508 主电源关闭时LV触发选择 设定值为 1 时发生 Err13.1 主电源电压不足保护(AC),所以依照 Pr510 动作。
- 名称:主电源关闭时 LV 触发选择
- 单位:-
- 范围:0~1
- 默认值:1
- 生效时间:立即生效
- 关联模式:ALL
- 说明:伺服接通状态中,主电源断路在 Pr509 主电源关闭检测时间 设置的时间持续检测时,选择是否使 Err13.1 主电源电压不足保护(AC) 功能产生动作。
- 0:伺服接通状态中,主电源一旦断路,不显示 Err13.1 而转为伺服关闭状态,其后主电源再次接通时,恢复到伺服接通状态。
- 1:伺服机接通状态中,主电源一旦断路,发生 Err13.1,显示错误。
注意: Pr509 设定值为 2000 时,本参数无效。若 Pr509 设置的时间过长,在检测主电源断路前,主电源变频器 P-N 间的电压下降,即使未到规定值以下,也会发生 Err13.0 主电源电压不足保护(PN),与 Pr508 的设置无关。
- 名称:主电源关闭检测时间
- 单位:ms
- 范围:70~2000
- 默认值:70
- 生效时间:立即生效
- 关联模式:ALL
- 说明:在主电源断路状态持续检测时,设置检测断路所需的时间。设置为 2000 时,主电源关闭检测为无效。
- 名称:警报时顺序设定
- 单位:-
- 范围:0~7
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置报警时的减速中、停止后的状态。
| 设定值 | 减速中 | 停止后 | 位置偏差 |
| 0 | DB 动作 | DB 动作 | 清除 |
| 1 | 空转(DB OFF) | DB 动作 | 清除 |
| 2 | DB 动作 | 空转(DB OFF) | 清除 |
| 3 | 空转(DB OFF) | 空转(DB OFF) | 清除 |
| 4 | 动作 A:立即停止;动作 B:DB 动作 | DB动作 | 清除 |
| 5 | 动作 A:立即停止;动作 B:DB OFF | DB动作 | 清除 |
| 6 | 动作 A:立即停止;动作 B:DB 动作 | 空转(DB OFF) | 清除 |
| 7 | 动作 A:立即停止;动作 B:DB OFF | 空转(DB OFF) | 清除 |
-
- 减速中:电机从当前动作状态变到 30r/min 以下速度的区间。若电机速度低于 30r/min,且在停止后变化,则滞后不受电机速度影响而依照停止后的状态。
- 动态制动器(DB):通过使电机的电气回路短路来紧急停止伺服电机的一种方法。动态制动回路内置于伺服单元内。
- 清除:位置偏差始终保持清零状态。
- 动作 A、B :出错时动态制动器是否立即停止。当本设定值为 4 ~ 7 时,若发生立即停止对应的警报,则依照动作 A 执行。若发生未对应立即停止的报警时,则不立即停止,而是依照动作 B 执行。
- 名称:立即停止时转矩设定
- 单位:%
- 范围:0~500
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置立即停止时的转矩限位。
通常工作时的转矩限位设定值为 0。
- 名称:过载等级设置
- 单位:%
- 范围:0~500
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置过载等级。设置值为 0 或大于 115 时,过载等级设置变为 115%。
一般情况下设置为 0,仅在降低过载等级使用时再设置等级。
针对主轴驱动器的该参数设置值用电机额定值的 115% 来限制。
- 名称:过速度等级设置
- 单位:r/min
- 范围:0~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置过速度等级。设置值为 0 时,过速度等级设置为电机最高转数的 1.2 倍。
根据以下公式设置:
Pr513=Vmax × (1.2 ~ 1.5)
其中:
-
- Vmax:运行时电机最高速度(r/min)。
- 1.2 ~ 1.5:防止过速度频繁发生的安全系数。
若电机速度超过本设定值,发生 Err26.0 过速度保护。
- 名称:电机可动范围设定
- 单位:0.1 转
- 范围:0~1000
- 默认值:10
- 生效时间:立即生效
- 关联模式:P
- 说明:设置相应位置指令输入范围内电机可动作的范围。
超过本设定值时,驱动器发生 Err34.0 故障,以避免电机因振荡而碰撞到机械端部。
- 名称:位置设定单位选择
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:重启生效
- 关联模式:P
- 说明:选择定位完成范围、位置偏差过大的设定单位。
- 0:指令单位。
- 1:编码器单位。
- 名称:转矩限制选择
- 单位:-
- 范围:0~6
- 默认值:1
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置转矩限制方式。
- 0、4、6:厂商使用。
- 1:选择 Pr013 第1转矩限制 第 1 转矩限制。
- 2:正方向上选择 Pr013 第 1 转矩限制,负方向上选择 Pr522 第2转矩限制 第 2 转矩限制。
- 3:TL-SEL OFF 时,选择 Pr013 第 1 转矩限制;TL-SEL ON 时,选择 Pr522 第 2 转矩限制。
- 5:总线通讯指令。
- 名称:第 2 转矩限制
- 单位:%
- 范围:0~500
- 默认值:500
- 生效时间:立即生效
- 关联模式:P S
- 说明:设置电机输出转矩的第 2 限制值。 参数值被适用电机的最大转矩所限制。
- 名称:转矩限制切换设定 1
- 单位:ms/100%
- 范围:0~4000
- 默认值:0
- 生效时间:立即生效
- 关联模式:P S
- 说明:设置转矩限制切换时第 1 转矩限制到第 2 转矩限制的变化率(斜率)。
- 名称:转矩限制切换设定 2
- 单位:ms/100%
- 范围:0~4000
- 默认值:0
- 生效时间:立即生效
- 关联模式:P S
- 说明:设置转矩限制切换时第 2 转矩限制到第 1 转矩限制的变化率(斜率)。
- 名称:外部输入时正方向转矩限制
- 单位:%
- 范围:0~500
- 默认值:500
- 生效时间:立即生效
- 关联模式:P S
- 说明:设置 Pr521 转矩限制选择 为 6(TL-SEL输入)时的正方向转矩限制。 参数值被适用电机的最大转矩所限制。
- 名称:外部输入时负方向转矩限制
- 单位:%
- 范围:0~500
- 默认值:500
- 生效时间:立即生效
- 关联模式:P S
- 说明:设置 Pr521 转矩限制选择 为 6(TL-SEL输入)时的负方向转矩限制。 参数值被适用电机的最大转矩所限制。
- 名称:LED初始状态
- 单位:-
- 范围:0~39
- 默认值:1
- 生效时间:重启生效
- 关联模式:ALL
- 说明:电源开通后初始状态时,选择操作面板 7 段 LED 所显示的数据类型:
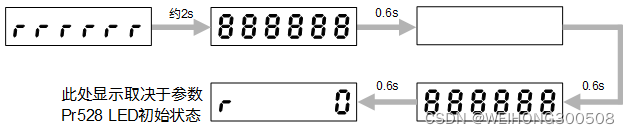
-
- 0:位置指令偏差。
- 1:电机速度。
- 2:位置指令速度。
- 3:速度控制指令。
- 4:转矩指令。
- 5:反馈脉冲总和。
- 6:指令脉冲总和。
- 7:载荷推定惯量比。
- 9:控制模式。
- 10:输入输出信号状态。
- 12:错误原因及历史记录。
- 13:警告编号。
- 14:再生负载率。
- 15:过载率。
- 16:惯量比。
- 17:不旋转的原因。
- 18:输入输出信号编号次数显示。
- 19:伺服使能状态。
- 20:绝对式编码器数据。
- 22:编码器、反馈光栅尺通信异常次数监视器。
- 23:总线驱动器从站地址。
- 24:编码器位置偏差(编码器单位)。
- 27:PN间电压。
- 28:软件版本。
- 29:驱动器制造编号。
- 30:电机制造编号。
- 31:累积工作时间。
- 34:驱动器剩余时间。
- 36:实时共振频率。
- 37:总线丢帧次数。
- 38:伺服运行状态。
- 39:Z相脉冲计数。
- 名称:脉冲再生输出界限设定
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置 Err28.0 脉冲再生界限保护 检测的有效或无效。
- 0:无效。
- 1:有效。
- 名称:前面板锁定设定
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:锁定前面板操作。
- 0:前面板操作非限制。
- 1:前面板操作锁定。
- 名称:转矩指令设置
- 单位:%
- 范围:-500~500
- 默认值:0
- 生效时间:立即生效
- 关联模式:T
- 说明:设置转矩指令输入大小。Pr001 控制模式设定 设定值为 3,即转矩模式时有效。
- 名称:速度偏差过大设定
- 单位:r/min
- 范围:0~100
- 默认值:0
- 生效时间:立即生效
- 关联模式:P
- 说明:速度偏差(内部位置指令速度与实际速度的差)若大于本设定值,发生 Err24.1 速度偏差过大保护。设定值为 0 时,不检测速度偏差过大保护。
- 名称:JOG 试机指令速度
- 单位:r/min
- 范围:0~500
- 默认值:300
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置 JOG 试机(速度控制)时的指令速度。
- 名称:转矩指令加算值
- 单位:%
- 范围:-100~100
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:用转矩控制之外的控制模式,设置不断加算到转矩指令的可变载荷补偿值。 实时自动调整的垂直轴模式有效时,更新本参数。在实时自动增益调整过程中,Pr607 转矩指令加算值 的值每隔 30 分钟写入 EEPROM,当再次接通电源时,驱动器以此数据作为初期值进行自动调整。
- 名称:正方向转矩补偿值
- 单位:%
- 范围:-100~100
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:位置控制模式时,设置接收正方向的位置指令时加算到转矩指令的动摩擦补偿值。
实时自动调整的摩擦补偿模式有效时,更新本参数。在实时自动增益调整的过程中,Pr608 正方向转矩补偿值 的值每隔 30 分钟写入 EEPROM,当再次接通电源时,驱动器以此数据作为初期值进行自动调整。
- 名称:负向转矩补偿值
- 单位:%
- 范围:-100~100
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:位置控制模式时,设置接收负方向的位置指令时加算到转矩指令的动摩擦补偿值。
实时自动调整的摩擦补偿模式有效时,更新本参数。在实时自动增益调整过程中,Pr609 负向转矩补偿值 的值每隔 30 分钟写入 EEPROM,当再次接通电源时,驱动器以此参数作为初期值进行自动调整。
- 名称:正负转矩补偿滤波器
- 单位:0.01ms
- 范围:0~30000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置正负转矩补偿对应滤波器的时间常数。设定值越大,正负转矩补偿越平顺,有利于系统稳定性的提高,但设定值过大会影响转矩补偿的效果。
- 名称:第 2 过速度等级设置
- 单位:r/min
- 范围:0~20000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置过速度等级。设定值为 0 时,过速度等级设置为电机最高转数的 1.2 倍。若电机速度超过本设定值,发生 Err26.1 第 2 过速度保护。
- 名称:前面板参数写入选择
- 单位:-
- 范围:0~1
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:选择前面板的参数变更时的 EEPROM 写入规格。
- 0:EEPROM 写入不同时进行。
- 1:EEPROM 写入同时进行。
- 名称:扰动转矩补偿增益
- 单位:%
- 范围:-100~100
- 默认值:0
- 生效时间:立即生效
- 关联模式:P S
- 说明:设定针对补偿增益 -100% ~ 100% 扰动转矩的补偿增益。 设定 Pr624 扰动观测器滤波器 后,需增大 Pr623 扰动转矩补偿增益 设定值。增大增益可增强抑制扰动影响的效果,但动作音变大,需结合 Pr624,寻找平衡性好的设置。
- 名称:扰动观测器滤波器
- 单位:0.01ms
- 范围:0~2500
- 默认值:50
- 生效时间:立即生效
- 关联模式:P S
- 说明:针对滤波器,设置扰动转矩补偿的滤波器时间常数。 初始时需设置一个较大值,在确认 Pr623 扰动转矩补偿增益 扰动转矩补偿增益用较小值动作后,再逐渐将 Pr624 的设定值调小。滤波器设定值变小后,可推定较少延迟的扰动转矩且可增强抑制扰动影响的效果,但动作音变大,故需寻找平衡性好的设定。
- 名称:警告闭锁时间选择
- 单位:s
- 范围:0~10
- 默认值:5
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置警告闭锁时间。
- 0:闭锁时间无限大。
- 1 ~ 10:闭锁时间 1 ~ 10(s)。
- 名称:自动共振检测准位
- 单位:%
- 范围:30~1000
- 默认值:100
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设定值越小,对共振检出越敏感。
- 名称:绝对式多圈数据上限值
- 单位:rev
- 范围:0~65534
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置绝对式编码器多圈数据的上限值。 若多圈数据超过此设定值,多圈数据变为 0;反之多圈数据从 0 向下转,变为 Pr629 的设定值。 多圈数据变化示意图如下:
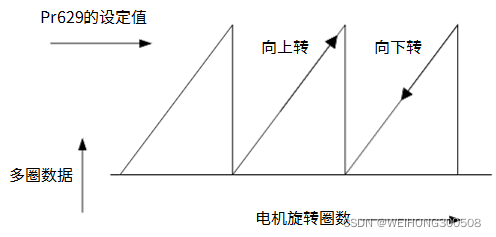
注意: 仅 Pr015 绝对式编码器设定 设置为 4 时,Pr629 的设置有效;Pr015 设置为 0 或 2(绝对式模式)时,忽略绝对式多圈数据的上限值,内部数据作为 65535。
- 名称:实时自动调整用户设定
- 单位:-
- 范围:-32767~32767
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:作为实时自动调整的动作模式,进行选择用户模式时( Pr002 设定实时自动调整设定值为 6)的自动调整功能的详细设定。
- Bit:1 ~ 0(负载特性推定)
设置负载特性推定功能的有效、无效。
-
-
- 0:无效
- 1:有效
-
负载特性推定无效时,即使将惯量比作为推定值进行更新,现在的设置也不发生变化。此外,将转矩补偿用推定值更新,则被清零(无效)。
-
- Bit:3 ~ 2(惯量比更新)
设置 Pr004 惯量比 负载特性推定结果的更新。
-
-
- 0:使用现在的设定
- 1:使用推定值更新
- Bit:6 ~ 4(转矩补偿)
-
设置 Pr607 指令脉冲输入模式设置、Pr608 电机每旋转1圈的指令脉冲数、Pr609 第1指令分倍频分子 的负载特性推定结果的更新。
| 设定值 | 功能 | 补偿设定1 | 补偿设定2 | 补偿设定3 |
| 0 | 使用现在的设定 | Pr607 | Pr608 | Pr609 |
| 1 | 转矩补偿无效 | 清零 | 清零 | 清零 |
| 2 | 垂直轴模式 | 更新 | 清零 | 清零 |
| 3 | 摩擦补偿(弱) | 更新 | 弱程度 | 弱程度 |
| 4 | 摩擦补偿(中) | 更新 | 中程度 | 中程度 |
| 5 | 摩擦补偿(强) | 更新 | 强程度 | 强程度 |
-
- Bit:7(刚性设定)
设置 Pr003 实时自动调整机器刚性设定 的有效、无效。
-
-
- 0:无效
- 1:有效
- Bit:8(固定参数设定)
-
设置固定参数的可否变更。
-
-
- 0:功能使用现在的设定
- 1:设定为固定值
- Bit:10 ~ 9(增益切换设定)
-
选择实时自动调整有效时,增益切换关联参数的设定方法。
-
-
- 0:使用现在的设定
- 1:增益切换无效
- 2:增益切换有效
- Bit 单位参数的设置方法如下:
- 确认各设置最后位 Bit。
-
例:转矩补偿功能的最后位 Bit 为 4。
-
-
- 将 2 的(最后位 Bit)乘方乘以设定值。
-
例:将转矩补偿功能设定为摩擦补偿(中)时,为 24 × 4 = 64。
-
-
- 有关各设置,计算前两步骤,并将所有加算的值作为 Pr632 设定值。
-
例:设置为:负载特性测定 = 有效、惯量比更新 = 有效、转矩补偿 = 摩擦补偿(中)、刚性设定 = 有效、固定参数 = 固定值,增益切换设定 = 有效时,20 × 1 + 22 × 1 + 24 × 4 + 27 × 1 + 28 × 1 + 29 × 2 = 1477。
注意: 本参数需用 Bit 单位进行设置。为防止设定错误,建议在编辑参数时使用 iMotion 软件。
- 名称:摩擦补偿生效速度设置
- 单位:0.1rpm
- 范围:0~1000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置摩擦转矩补偿启动的速度点。 由于机构摩擦力不同,速度点可能不同,可根据具体情况进行微调。
- 名称:警告掩码设定
- 单位:-
- 范围:-32768~32767
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:进行警告检测的掩码设置。若将对应 Bit 置于 1,则对应警告的检测为无效。
- 名称:绝对式原点位置偏移
- 单位:指令单位
- 范围:-1073741823~1073741823
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置使用绝对式编码器(绝对式外部反馈尺)时的编码器位置(外部反馈尺位置)和机械坐标系位置的偏移量。
- 名称:2 段转矩滤波器时间常数
- 单位:0.01ms
- 范围:0~2500
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置针对转矩指令的滤波器的时间常数,且与增益的选择状态无关。设定值过大,会导致控制不稳定,发生振动。
当 Pr643 2段转矩滤波器衰减项 不低于 50 时(即使用 2 次滤波器),Pr642 设定值对应的时间常数为 5 ~ 159(0.05 ~ 1.59ms,频率 100 ~ 3000Hz)。
-
- 0:滤波器无效。
- 1 ~ 4:对应时间常数 5(3000Hz)。
- 5 ~ 158:对应时间参数 5 ~ 158(100~3000Hz)。
- 159 ~ 2500:对应时间常数 159(100Hz)。
- 名称:2 段转矩滤波器衰减项
- 单位:-
- 范围:0~1000
- 默认值:1000
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置 2 段转矩滤波器的衰减项。设定值过小或过大导致振动。
- 0 ~ 49:作为 1 次滤波器动作。
- 50 ~ 1000:作为 2 次滤波器动作。
通常设定为 1000,即 ζ = 1 形式的 2 次滤波器(ζ = Pr643 ÷ 1000)。
- 名称:立即停止结束等待时间
- 单位:ms
- 范围:0~10000
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置对应立即停止的警告发生时,制动器解除输出(BRK-OFF)OFF 后,维持电机通电的时间。设定值为 0 时,落下防止功能无效。
- 名称:内部使用
- 单位:-
- 范围:-32767~32767
- 默认值:0
- 生效时间:立即生效
- 关联模式:ALL
- 说明:固定为 0。
- 名称:电机类型选择
- 单位:-
- 范围:0~2
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:选择使用电机类型。
- 1:直线型。
- 2:旋转型。 设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:电机额定电流有效值
- 单位:0.1Arms
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机额定电流有效值。 设定值为 0 时,发生 Err70.0 电机设定异常保护。 此外,超过驱动器容许的额定电流值时,发生 Err70.1 电机组合异常 1 保护。
- 名称:电机额定转矩
- 单位:0.1N.m
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机额定转矩。 设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:电机最高速度
- 单位:r/min
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机最高速度。
设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:电机线反电势常数
- 单位:0.1V/(1000rpm)
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设定电机线反电势常数。 设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:电机相电阻
- 单位:0.01Ω
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机相电阻。 设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:电机相电感
- 单位:0.01mH
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机相电感。 设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:电机惯量
- 单位:0.01kg.cm2
- 范围:0~6553500
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机的转子转动惯量。 设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:编码器单圈位数
- 单位:Bit
- 范围:0~31
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置编码器单圈位数,仅在使用串行通讯旋转型编码器时有效。 设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:编码器圈数
- 单位:Turns
- 范围:0~31
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置编码器圈数,仅在使用串行通讯旋转型编码器时有效。
- 名称:1回转编码器脉冲数
- 单位:pulse
- 范围:0~16777216
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机1回转反馈编码器的脉冲数(4 递倍后的脉冲或正弦波个数)。 本设定仅在使用 AB 相输出型或正弦输出型的反馈编码器时有效。 有效的设定范围为 1000~16777216,设置范围外时,发生 Err70.0 电机设定异常保护。
- 名称:内部使用
- 单位:-
- 范围:0~65535
- 默认值:1
- 生效时间:重启生效
- 关联模式:ALL
- 说明:固定为 0。
- 名称:电机瞬时最大电流
- 单位:0.1Arms
- 范围:0~65535
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机瞬时最大电流。 设定值为 0 时,发生 Err70.0 电机设定异常保护。 此外,超过驱动器容许的瞬时最大电流值时,发生 Err70.1 电机组合异常 1 保护。
- 名称:初始磁极角
- 单位:0.1 度(电气角)
- 范围:-3600~3600
- 默认值:-3600
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置初始磁极角。
- 名称:电机热时间常数
- 单位:0.1s
- 范围:1~32767
- 默认值:1600
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置电机热时间常数。
- 名称:磁极检出方式选择
- 单位:-
- 范围:0~4
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:选择磁极检出方式。
- 0:未选择
- 1:CS 信号
- 2:磁极位置推定
- 3:磁极位置复原
- 4:CS信号(省线式)
设定值为 0 时,发生 Err70.0 电机设定异常保护。
- 名称:CS 相位设定
- 单位:0.1度(电气角)
- 范围:0~3600
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:设置感应电压和 CS 信号的相位差。 本设置仅在选择 CS 信号方式 Pr724 磁极检出方式选择 设置为 1 有效。
- 名称:磁极位置推定 转矩指令时间
- 单位:ms
- 范围:0~200
- 默认值:200
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置磁极位置推定的转矩指令时间。
- 电机的移动脉冲数在 Pr728 磁极位置推定 零移动脉冲宽度设定
- 单位:pulse的设定值以上时,即使未到施加时间转矩指令也会停止。
- 若设定值较小,电机可能无法充分动作,从而导致推定精度不良或者磁极位置推定异常。
- 在选择磁极位置推定方式时 Pr724 磁极检出方式选择 设置为 2 有效。
- 名称:磁极位置推定 指令转矩
- 单位:%
- 范围:0~300
- 默认值:50
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置磁极位置推定的指令转矩。 若设定值较小,电机可能无法充分动作,从而导致推定精度不良或者磁极位置推定异常。 在选择磁极位置推定方式 Pr724 磁极检出方式选择 设置为 2 有效。 实际指令转矩受电机的容许最大转矩限制。
- 名称:磁极位置推定 零移动脉冲宽度设定
- 单位:pulse(编码器)
- 范围:0~32767
- 默认值:100
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置判定为磁极位置推定时的零移动的脉冲宽度。 即使在 Pr726 磁极位置推定 转矩指令时间、Pr727 磁极位置推定 指令转矩 条件下施加转矩,电机移动脉冲不到本设定值时判定为零移动。 虽然缩小设定值可以减少磁极位置推定中的移动量,但可能会导致推定精度不良。作为标准,设置电气角 1 度相当的脉冲数。 在选择磁极位置推定方式 Pr724 磁极检出方式选择 设置为 2 有效。
- 名称:磁极位置推定 电机停止判定脉冲数
- 单位:pulse(编码器)
- 范围:0~32767
- 默认值:40
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置磁极位置推定时的电机停止的条件。
- 电机移动脉冲数为 Pr729 以下,且持续 Pr730 磁极位置推定 电机停止判定时间 ms 以上,则判断为电机停止,施加下一个转矩指令。
- 在选择磁极位置推定方式 Pr724 磁极检出方式选择 设置为 2 有效。
- 名称:磁极位置推定 电机停止判定时间
- 单位:ms
- 范围:0~32767
- 默认值:40
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置磁极位置推定时的电机停止的条件。
- 电机移动脉冲数为 Pr729 磁极位置推定 电机停止判定脉冲数 以下,且持续 Pr730 ms 以上,则判断为电机停止,施加下一个转矩指令。
- 在选择磁极位置推定方式 Pr724 磁极检出方式选择 设置为 2 有效。
- 名称:磁极位置推定 电机停止限制时间
- 单位:ms
- 范围:0~32767
- 默认值:1000
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置磁极位置推定的电机停止限制时间。
- 若经过本设定值以上也未判定为电机停止,说明发生 Err71.1 磁极位置推定异常 2 保护。
- 在选择磁极位置推定方式 Pr724 磁极检出方式选择 设置为 2 有效。
- 名称:磁极位置推定 转矩指令滤波器
- 单位:0.01ms
- 范围:0~5000
- 默认值:1000
- 生效时间:立即生效
- 关联模式:ALL
- 说明:设置磁极位置推定的转矩指令滤波器时间常数。
- 设定值为 0 时滤波器无效,变为阶梯指令。
- 在选择磁极位置推定方式 Pr724 磁极检出方式选择 设置为 2 有效。
- 名称:内部使用
- 单位:-
- 范围:0~327670000
- 默认值:0
- 生效时间:重启生效
- 关联模式:ALL
- 说明:固定为 0。


















 2989
2989

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









