







重读了HOG特征的论文,比起SIFT特征这种磨人小妖级别的特征,HOG还是naive. 但HOG特征的使用效果使得其在目前的应用中热度不减。讨论其设计思路是有意思的事情。本文试图从算法的步骤上分析算法设计的意义。但这毕竟是个人观点,各位自己也要判断,要是各位看官阅后理解出现了偏差,乃们自己也有责任。
几个问题
HOG特征也是人工设计的特征,既然是人工设计,那就一定包含了作者的深厚内力在里面,也是充满了经验主义,更多的是实验论证,疗效是关键,而不是理论上的优雅。关于它为什么就这么好,原作者本人也是做了经验上和工程上的分析。
本文主要探讨四个问题,为什么使用局部方向直方图,和作者强调的三个优点:良好的梯度尺度,良好的方向和粗糙的空间划分,高质量的有交叠的块描述子的局部对比度归一化在HOG特征的设计上是如何体现的。
原理框架

输入图像
HOG特征与SIFT特征不同的是它检测窗口尺度固定,通过降采样原始图片来获得与窗口尺寸匹配的输入图像,而SIFT把这部分直接做到了检测算子的构造流程中去。论文中选择64*128的窗口也是根据数据集的特点和待检测目标的性质决定的。
归一化伽马校正与彩色空间
和硕士论文一样,做图像的总喜欢加一个图像的预处理,一来为了凑字数,二来为了保证系统的完整性。在这里作者也试图通过伽马校正来抑制光照的影响,并试图改变色彩空间来提高性能。但针对行人检测,也或许是因为后续步骤对光照已经有较好的抑制,此步骤的引入会降低实验效果。
| 彩色空间(基准:RGB) | 校正方法(基准:无校正) | 效果 |
|---|---|---|
| LAB | – | 近似无区别 |
| 灰度 | – | ↓1.5% |
| – | 平方根 | ↓1% |
| – | 对数压缩 | ↓2% |
计算梯度(良好的梯度尺度)
作者对图像在x和y方向各做了一个[1 0 -1]的差分,得到了x和y方向的梯度图。但何为良好的梯度尺度呢?好不好都是对比出来的。在做完差分后,一般加一个高斯平滑。但在这里,作者选择了最简单的操作,因为在这个任务中任何使用复杂操作的企图都会导致性能下降。
| 梯度算子 | 高斯平滑 | 效果 |
|---|---|---|
| 1-D point derivatives [1, 0, -1] | σ=0 | baseline |
| Cubic corrected 1-D [1, -8, 0, 8, -1] | σ=0 | ↓1% |
| 1-D point derivatives [-1,1] | σ=0 | ↓1.5% |
| 2×2 diagonal ones | σ=0 | ↓1.5% |
| – | σ=2 | ↓9% |
构造cell,bins权重投票(良好的方向和粗糙的空间划分)
与上一节一样,之所以称为良好,是因为比对比试验的结果都好。
作者试验了选取360度方向的情况,效果比180度差。作者最终选择了9个bin,因为试验的其他bin数效果都不如9,18的效果和9差不多,但在作者的评价点上略差。
划分的具体原理是,将方向按照距离相邻两个bin的距离按照幅值按比例划分。
Block的构造(高质量的有交叠的块描述子的局部对比度归一化)
作者将4个cell作为一个block,把每个cell中的9维向量连起来,得到一个block的36维特征,为什么是2×2的4个cell组成一个block,因为作者使用2×1的和1×2的各种试都不如2*2的效果好。
作者滑动block,每个block之间是有重叠的,因为不重叠性能会大幅下降,同时,有重叠也是类似工程问题的通用解决方法。这个过程类似卷积操作的滑动,不做赘述。
归一化
对得到的36维特征做归一化,增强特征间的对比度。作者选择了l2-hys, 即,先做l2-norm,结果中如果有值大于0.2,则截断设置为0.2,再重新做l2-norm.着也是大量实验对比得到的结果。
为什么用局部方向直方图
方向梯度直方图的使用,也是相关工程的通用手法。在形状上下文,SIFT,边缘向直方图等算法中都用到了这种操作。
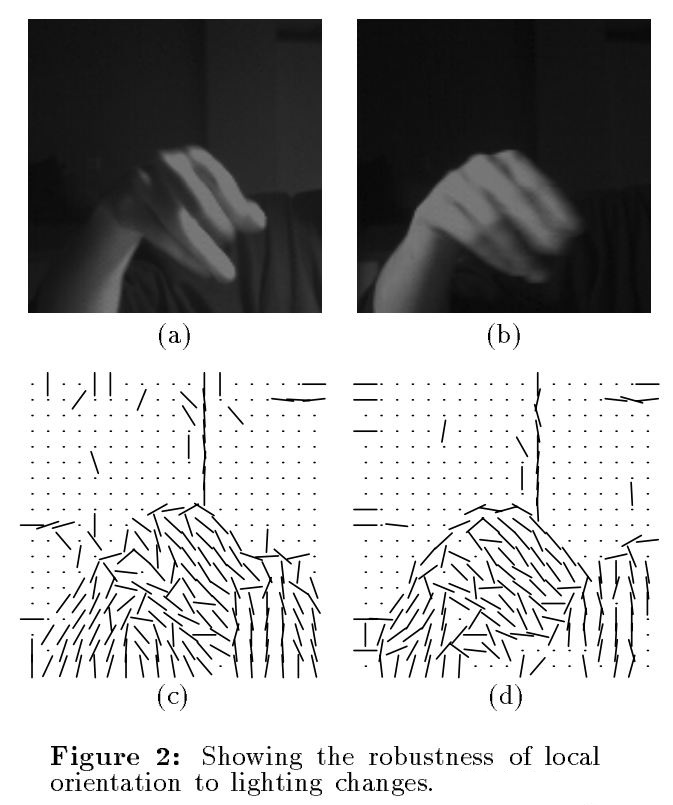
可以看到,梯度的设定能够有效抑制光照导致的像素点绝对值的变化。局部的统计信息能够有效地提高算法的鲁棒性,抑制单一像素点的个体干扰。
论文对应代码实现
一篇简洁易懂的Matlab代码实现,取自网络,版权归原作者所有,侵删。
function [feature] = hog_feature_vector(im)
% The given code finds the HOG feature vector for any given image. HOG
% feature vector 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1751
1751











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









