







东方欲晓,莫道君行早。
踏遍青山人未老,风景这边独好。——毛泽东《清平乐·会昌》
一、实验内容
将 STM32 的 PA0(TIM5的CH1) 配置为 输入捕获模式 ,由于 PA0 与 KEY3 相连接,编写程序实现以下功能:
(1)当按下按键 KEY3 时,捕获低电平持续的时间;
(2)将按键 KEY3 低电平持续的时间转换为 毫秒(ms) 为单位的数值;
(3)将低电平的持续时间通过 UART1 发送到计算机;
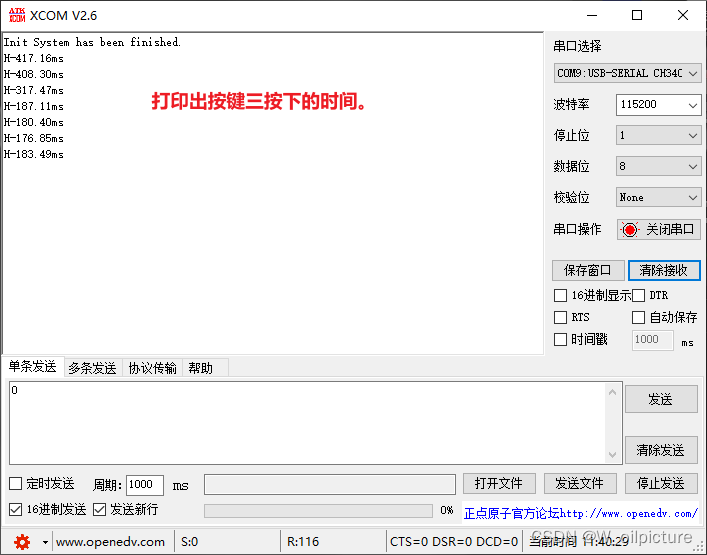
(4)通过串口助手查看按键 KEY3 低电平持续的时间。
所用工具:
- 芯片:
STM32F103RCT6 - IDE :
MDK-Keil软件 SMT32F10x固件库函数TIM5 CH1:通用定时器5 通道1(CH1)
二、实验原理
2.1、输入捕获简介
- 输入捕获是定时器通用定时器许多功能中的一种。输入捕获可以对输入的信号的上升沿,下降沿或者双边沿进行捕获,通常用于测量输入信号的脉宽、测量 PWM 输入信号的频率及占空比。
- 输入捕获的工作原理比较简单,在输入捕获模式下,当相应的
ICx信号检测到跳变沿后,将使用捕获/比较寄存器(TIMx_CCRx)来锁存计数器的值。简单的说就是通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的通道的捕获/比较寄存(TIMx_CCRx)里面,完成一次捕获。同时还可以配置捕获时是否触发中断/DMA等。下面我们以输入捕获测量脉宽为例,通过一个简图来介绍输入捕获的工作原理,如图 所示:
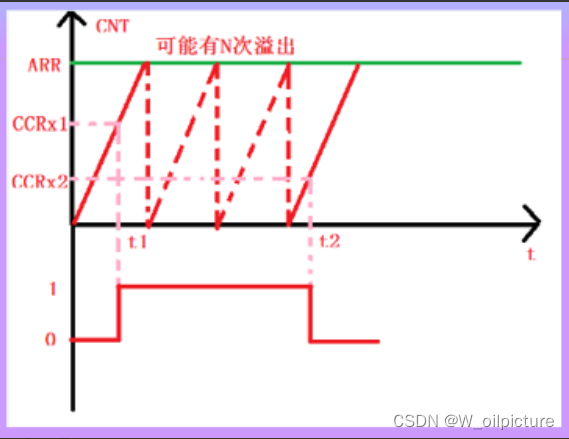
从上图可以看出,t1 - t2 时间就是我们需要测量的高电平时间,假如定时器工作在向上计数模式,测量方法是:首先设置定时器通道 x 为上升沿捕获,这样在 t1 时刻,就会捕获到当前的 CNT 值,然后立即清零 CNT,并设置通道 x 为下降沿捕获,这样到 t2 时刻,又会发生捕获事件,得到此时的 CNT 值,记为 CCRx2。根据定时器的计数频率,我们就可以算出 t1 - t2 的时间,从而得到高电平脉宽。在 t1 - t2 时间内可能会出现 N 次定时器溢出,因此我们还需要对定时器溢出进行处理,防止因高电平时间过长发生溢出导致测量数据不准。(CNT计数的次数等于:N * ARR + CCR x 2,有了这个计数次数,再乘以 CNT 的计数周期,即可得到 t2 - t1 的时间长度,即高电平持续时间。)
2.2、输入捕获实验流程图分析
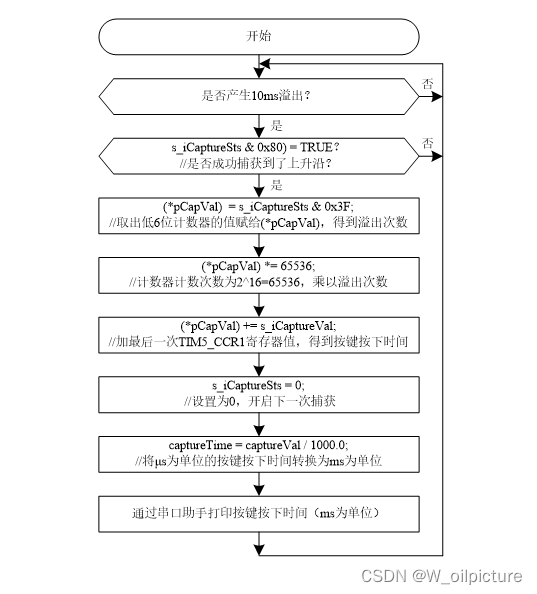
- 输入捕获实验中断服务函数流程图:

- 输入捕获实验应用层流程图:
2.3、通用定时器部分寄存器
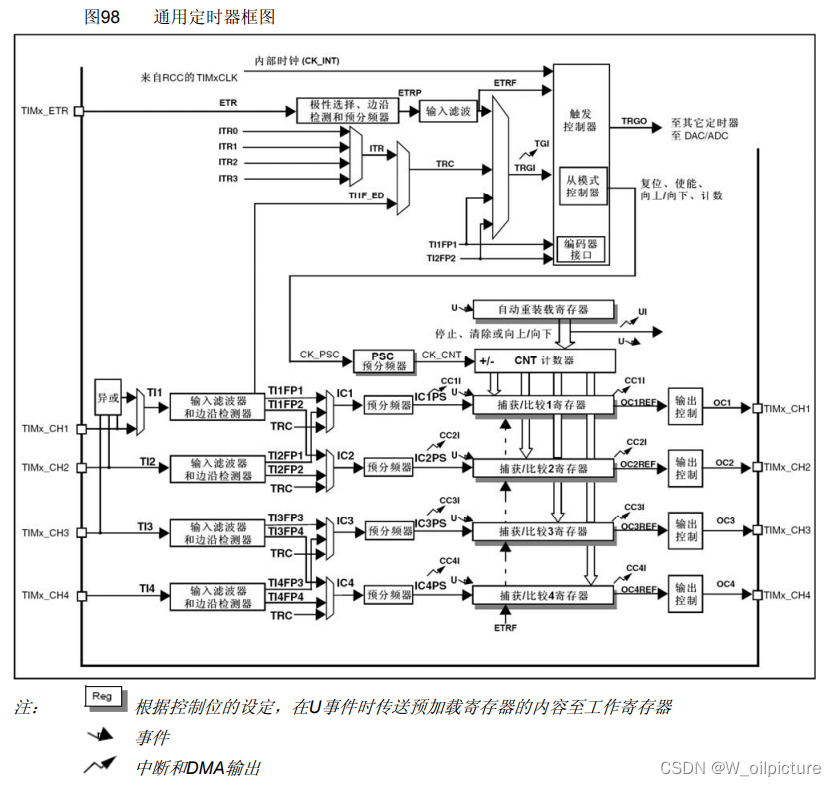
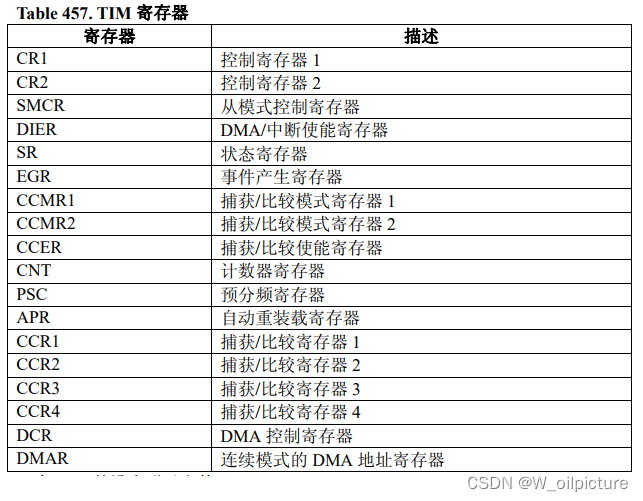
本实验涉及的通用定时器寄存器除了包括定时器基本使用的控制寄存器1(TIMx_CR1)、控制寄存器2(TIMx_CR2)、DMA/中断使能寄存器(TIMx_DIER)、状态寄存器(TIMx_SR)、事件产生寄存器(TIMx_EGR)、计数器(TIMx_CNT)、预分频器(TIMx_PSC)和自动重载寄存器(TIMx_ARR),还包括捕获/比较模式寄存器1(TIMx_CCMR1)、捕获/比较使能寄存器(TIMx_CCER)和捕获/比较寄存器1(TIMx_CCR1)。
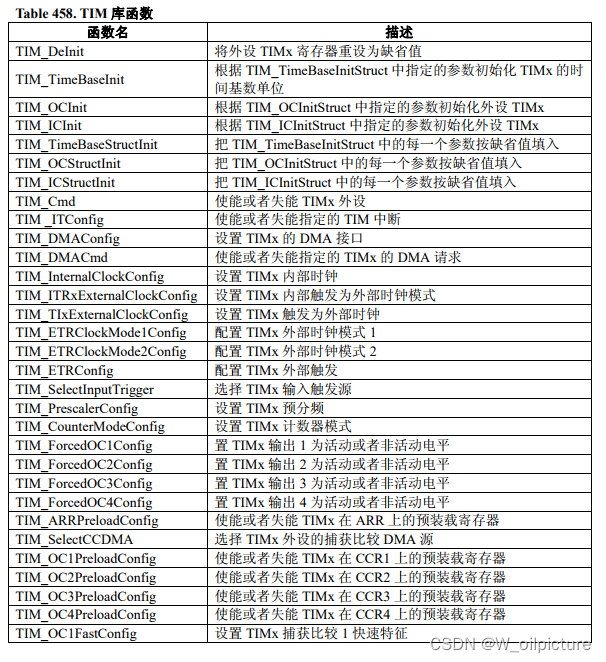
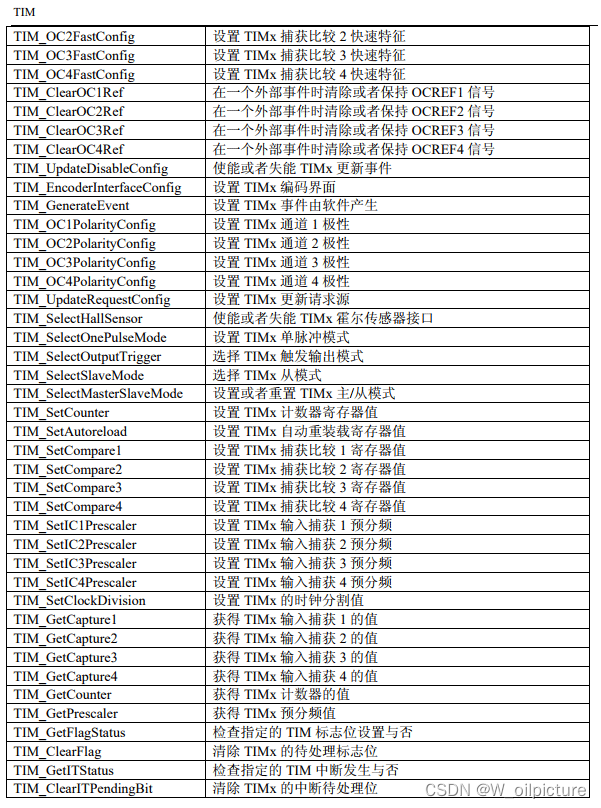
2.4、通用定时器部分固件库函数
本实验涉及的通用定时器固件库函数包括TIM_TimeBaseInit、TIM_Cmd、TIM_ITConfig、TIM_ClearITPendingBit、TIM_GetITStatus、TIM_SelectOutputTrigger,还包括TIM_ICInit()和TIM_OC1PolarityConfig()。
TIM_ICInit()函数:的功能是根据TIM_ICInitStruct中指定的参数初始化外设TIMx;TIM_OC1PolarityConfig()函数:的功能是设置TIMx通道1极性。
三、代码编写
3.1、复制并编译原始工程
链接: https://pan.baidu.com/s/1SPBUBYaOGNuDIkTp_6HnkA
提取码: if52
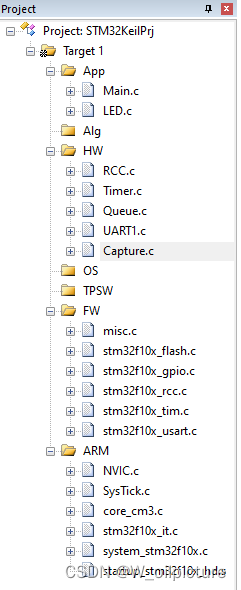
3.2、添加 Capture 文件对 (.c/.h)

3.3、完善 Capture.h 文件
#ifndef _CAPTURE_H_
#define _CAPTURE_H_
/*********************************************************************************************************
* 包含头文件
*********************************************************************************************************/
#include "DataType.h"
/*********************************************************************************************************
* 宏定义
*********************************************************************************************************/
/*********************************************************************************************************
* 枚举结构体定义
*********************************************************************************************************/
/*********************************************************************************************************
* API函数声明
*********************************************************************************************************/
void InitCapture(void); //初始化Capture模块
u8 GetCaptureVal(i32* pCapVal); //获取捕获时间,返回值为1表示捕获成功,此时*pCapVal才有意义
#endif
3.4、完善 Capture.c 文件
/*********************************************************************************************************
* 包含头文件
*********************************************************************************************************/
#include "Capture.h"
#include "stm32f10x_conf.h"
/*********************************************************************************************************
* 内部变量
*********************************************************************************************************/
//s_iCaptureSts中的bit7为捕获完成的标志,bit6为捕获到下降沿标志,bit5-bit0为捕获到下降沿后定时器溢出的次数
static u8 s_iCaptureSts = 0; //捕获状态
static u16 s_iCaptureVal; //捕获值
/*********************************************************************************************************
* 内部函数声明
*********************************************************************************************************/
static void ConfigTIM5ForCapture(u16 arr, u16 psc); //配置TIM3
/*********************************************************************************************************
* 函数名称:ConfigTIM5ForCapture
* 函数功能:配置TIM3
* 输入参数:arr-自动重装值,psc-预分频器值
* 输出参数:void
* 返 回 值:void
* 创建日期:2018年01月01日
* 注 意:此处暂定使用定时器TIM5的CH1(PA0)来做输入捕获,捕获PA0(KEY3)上低电平的脉宽
*********************************************************************************************************/
static void ConfigTIM5ForCapture(u16 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure; //GPIO_InitStructure用于存放GPIO的参数
TIM_TimeBaseInitTypeDef TIMx_TimeBaseStructure;//TIM_TimeBaseStructure用于存放定时器的基本参数
TIM_ICInitTypeDef TIMx_ICInitStructure; //TIMx_ICInitStructure用于存放定时器的通道参数
NVIC_InitTypeDef NVIC_InitStructure; //NVIC_InitStructure用于存放NVIC的参数
//使能RCC相关时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //使能TIM5的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能捕获的GPIOA的时钟
//配置PA0,对应TIM5的CH1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //设置引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置输入模式
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据参数初始化GPIO
GPIO_SetBits(GPIOA, GPIO_Pin_0); //将捕获对应的引脚置为高电平
//配置TIM5
TIMx_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值
TIMx_TimeBaseStructure.TIM_Prescaler = psc; //设置TIMx时钟频率除数的预分频值
TIMx_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割
TIMx_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //设置定时器TIMx为向上计数模式
TIM_TimeBaseInit(TIM5, &TIMx_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
//配置TIM5的CH1为输入捕获
//CC1S = 01,CC1通道被配置为输入,输入通道IC1映射到定时器引脚TI1上
TIMx_ICInitStructure.TIM_Channel = TIM_Channel_1; //设置输入通道通道
TIMx_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling; //设置为下降沿捕获
TIMx_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //设置为直接映射到TI1
TIMx_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //设置为每一个边沿都捕获,捕捉不分频
TIMx_ICInitStructure.TIM_ICFilter = 0x08; //设置输入滤波器
TIM_ICInit(TIM5, &TIMx_ICInitStructure); //根据参数初始化TIM5的CH1
//配置NVIC
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; //中断通道号
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //设置抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //设置子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断
NVIC_Init(&NVIC_InitStructure); //根据参数初始化NVIC
TIM_ITConfig(TIM5, TIM_IT_Update | TIM_IT_CC1, ENABLE); //使能定时器的更新中断和CC1IE捕获中断
TIM_Cmd(TIM5, ENABLE); //使能TIM5
}
/*********************************************************************************************************
* 函数名称:TIM5_IRQHandler
* 函数功能:TIM5中断服务函数
* 输入参数:void
* 输出参数:void
* 返 回 值:void
* 创建日期:2018年01月01日
* 注 意:
*********************************************************************************************************/
void TIM5_IRQHandler(void)
{
if((s_iCaptureSts & 0x80) == 0) //最高位为0,表示捕获还未完成
{
//高电平,定时器TIMx发生了溢出事件
if(TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET)
{
if(s_iCaptureSts & 0x40) //发生溢出,并且前一次已经捕获到低电平
{
//TIM_APR 16位预装载值,即CNT > 65536-1(2^16 - 1)时溢出。
//若不处理,(s_iCaptureSts & 0x3F)++等于0x40 ,溢出数等于清0
if((s_iCaptureSts & 0x3F) == 0x3F) //达到多次溢出,低电平太长
{
s_iCaptureSts |= 0x80; //强制标记成功捕获了一次
s_iCaptureVal = 0xFFFF; //捕获值为0xFFFF
}
else
{
s_iCaptureSts++; //标记计数器溢出一次
}
}
}
if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET) //发生捕获事件
{
if(s_iCaptureSts & 0x40) //bit6为1,即上次捕获到下降沿,那么这次捕获到上升沿
{
s_iCaptureSts |= 0x80; //完成捕获,标记成功捕获到一次上升沿
s_iCaptureVal = TIM_GetCapture1(TIM5); //s_iCaptureVa记录捕获比较寄存器的值
//CC1P=1 设置为下降沿捕获,为下次捕获做准备
TIM_OC1PolarityConfig(TIM5, TIM_ICPolarity_Falling);
}
else //bit6为0,表示上次没捕获到下降沿,这是第一次捕获下降沿
{
s_iCaptureSts = 0; //清空溢出次数
s_iCaptureVal = 0; //捕获值为0
TIM_SetCounter(TIM5, 0); //设置寄存器的值为0
s_iCaptureSts |= 0x40; //bit6置为1,标记捕获到了下降沿
TIM_OC1PolarityConfig(TIM5, TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获
}
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1 | TIM_IT_Update); //清除中断标志位
}
/*********************************************************************************************************
* 函数名称:GetCaptureVal
* 函数功能:获取捕获时间,返回值为1表示捕获成功,此时*pCapVal才有意义
* 输入参数:void
* 输出参数:pCalVal,捕获到的值的地址
* 返 回 值:ok:1-获取成功
* 创建日期:2018年01月01日
* 注 意:
*********************************************************************************************************/
u8 GetCaptureVal(i32* pCapVal)
{
u8 ok = 0;
if(s_iCaptureSts & 0x80) //最高位为1,表示成功捕获到了上升沿(获取到按键弹起标志)
{
ok = 1; //捕获成功
(*pCapVal) = s_iCaptureSts & 0x3F; //取出低6位计数器的值赋给(*pCapVal),得到溢出次数
(*pCapVal) *= 65536;//计数器计数次数为2^16=65536,乘以溢出次数,得到溢出时间总和(以1/1MHz=1us为单位)
(*pCapVal) += s_iCaptureVal; //加上最后一次比较捕获寄存器的值,得到总的低电平时间
s_iCaptureSts = 0; //设置为0,开启下一次捕获
}
return(ok); //返回是否捕获成功的标志
}
3.5、完善 main.c 文件
/*********************************************************************************************************
* 函数名称:Proc2msTask
* 函数功能:2ms处理任务
* 输入参数:void
* 输出参数:void
* 返 回 值:void
* 创建日期:2018年01月01日
* 注 意:
*********************************************************************************************************/
static void Proc2msTask(void)
{
static i16 s_iCnt5 = 0; //10ms计数器
i32 captureVal; //捕获到的值
float captureTime; //将捕获值转换成时间
if(Get2msFlag()) //判断2ms标志状态
{
// LEDFlicker(250); //调用闪烁函数
if(s_iCnt5 >= 4) //计数器数值大于或等于4
{
if(GetCaptureVal(&captureVal)) //成功捕获
{
captureTime = captureVal / 1000.0;
printf("H-%0.2fms\r\n", captureTime); //打印出捕获值
}
s_iCnt5 = 0; //重置计数器的计数值为0
}
else
{
s_iCnt5++; //计数器的计数数值加1
}
Clr2msFlag(); //清除2ms标志
}
}
四、实验结果















 1960
1960











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











