







我国高分辨率对地观测系统重大专项已全面启动,高空间、高光谱、高时间分辨率和宽地面覆盖于一体的全球天空地一体化立体对地观测网逐步形成,将成为保障国家安全的基础性和战略性资源。未来10年全球每天获取的观测数据将超过10PB,遥感大数据时代已然来临。随着小卫星星座的普及,对地观测已具备3次以上的全球覆盖能力,遥感影像也不断被更深入的应用于矿产勘探、精准农业、城市规划、林业测量、军事目标识别和灾害评估中。最近借助深度学习方法,基于卷积神经网络的遥感影像自动地物识别取得了令人印象深刻的结果。深度卷积网络采用“端对端”的特征学习,通过多层处理机制揭示隐藏于数据中的非线性特征,能够从大量训练集中自动学习全局特征(这种特征被称为“学习特征”),是其在遥感影像自动目标识别取得成功的重要原因,也标志特征模型从手工特征向学习特征转变。
以PyTorch为主体的深度学习平台为使用卷积神经网络也提供程序框架。但卷积神经网络涉及到的数学模型和计算机算法都十分复杂、运行及处理难度很大,PyTorch平台的掌握也并不容易。使广大学者能理解卷积神经网络背后的数学模型和计算机算法,掌握利用PyTorch为基础的遥感影像地物分类,遥感图像目标检测,以及遥感图像目标分割等应用。
深度卷积网络知识详解
1.深度学习在遥感图像识别中的范式和问题
2.梳理深度学习的历史发展历程,从中理解深度学习在遥感应用中的优缺点
3.机器学习,深度学习等任务的处理流程
4.卷积神经网络的原理及应用
5.卷积运算的原理、方法
6.池化操作,全连接层,以及分类器的作用及在应用中的注意事项
7.BP反向传播算法的方法
8.CNN模型代码详解
9.特征图,卷积核可视化分析
PyTorch应用与实践(遥感图像场景分类)
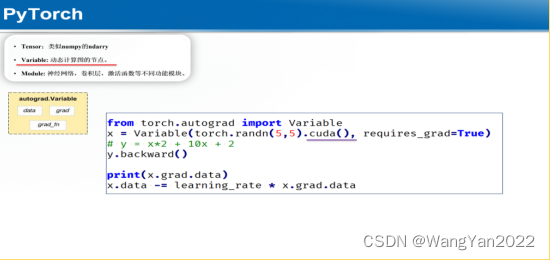
1.PyTorch框架
2.动态计算图,静态计算图等机制
3.PyTorch的使用教程
4.PyTorch的学习案例
5.PyTorch的使用与API
6.PyTorch图像分类任务策略方法
案例:
(1)不同超参数,如初始化,学习率对结果的影响
(2)使用PyTorch搭建神经网络并实现遥感图像场景分类
卷积神经网络实践与遥感影像目标检测
1.深度学习下的遥感影像目标检测基本知识
2.目标检测数据集的图像和标签表示方式
3.讲解目标检测模型的评估方案,包括正确率,精确率,召回率,mAP等
4.讲解two-stage(二阶)检测模型框架,RCNN, Fast RCNN, Faster RCNN等框架的演变和差异
5.讲解 one-stage(一阶)检测模型框架,SDD ,Yolo等系列模型 现有检测模型发展小结
遥感影像目标检测任务案例
案例:
(1)一份完整的Faster-RCNN 模型下实现遥感影像的目标检测
(2)讲解数据集的制作过程,包括数据的存储和处理
(3)数据集标签的制作
(4)模型的搭建,组合和训练
(5)检测任数据集在验证过程中的注意事项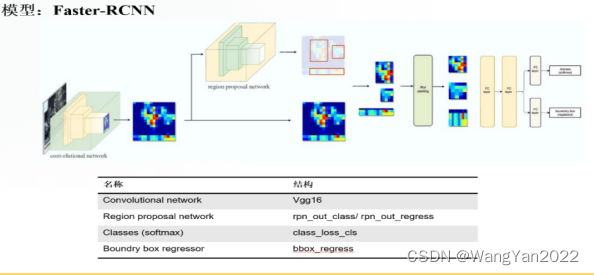

深度学习与遥感影像分割任务
1.深度学习下的遥感影像分割任务的基本概念
2.讲解FCN,SegNet,U-net等模型的差异
3.分割模型的发展小结
4.遥感影像分割任务和图像分割的差异
5.在遥感影像分割任务中的注意事项
案例:
(1)讲解数据集的准备和处理
(2)遥感影像划分成小图像的策略
(3)模型的构建和训练方法
(4)验证集的使用过程中的注意事项

遥感影像问题探讨与深度学习优化技巧
1.现有几个优秀模型结构的演变原理,包括AlexNet,VGG,googleNet,ResNet,DenseNet等模型
2.从模型演变中讲解实际训练模型的技巧
3.讲解针对数据的优化策略
4.讲解针对模型的优化策略
5.讲解针对训练过程的优化策略
6.讲解针对检测任务的优化策略
7.讲解针对分割任务的优化策略
8.提供一些常用的检测,分割数据集的标注工具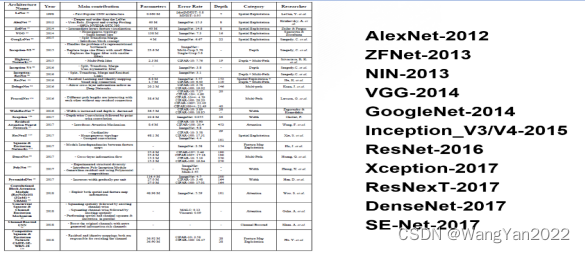
附加学习
学员根据科研或生产实际,集体讨论深度学习实施方案
提供若干附加材料,包括数据集,标签工具、代码以及学习材料
实例回顾、训练、巩固 答疑与讨论
【教 程】基 于PyTorch 深 度 学 习 遥 感 影 像 地 物 分 类 与 目 标 检 测、分 割 及 遥 感 影 像 问题 深 度 学 习 优 化
更多
●基于PyTorch深度学习无人机遥感影像目标检测、地物分类及语义分割
●基于Python深度学习遥感影像地物分类与目标识别、分割
●GEE-Python遥感大数据分析、管理与可视化实践技术应用
●PROSAIL模型前向模拟与植被参数遥感提取代码实现
●高光谱遥感数值建模技术及在植被、水体、土壤信息提取
●植被参数遥感反演与数据同化
●“卫星-无人机-地面”遥感数据快速使用及地物含量计算的实现方法
●陆面生态水文模拟与多源遥感数据同化的实践技术应用
●长时间序列遥感数据处理及在全球变化、物候提取、植被变绿与固碳分析、生物量估算与趋势分析等
●近地面无人机植被定量遥感与生理参数反演实践技术应用
●无人机遥感在农林信息提取中的实现方法与GIS融合应用
●InVEST实践与进阶及在生态系统服务供需、固碳、城市热岛、论文写作等实际项目中的应用
●MAXENT模型生物多样性生境模拟与保护优先区甄选、保护区布局优化评估及论文写作技巧














 670
670











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









