






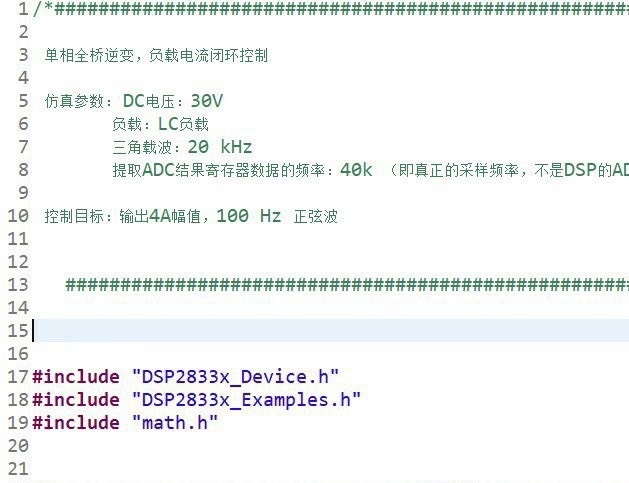
基于DSP28335逆变器程序,单相全桥逆变器程序,采用双极性调制
程序逻辑清晰,注释详细,详细到几乎每一句都有注释,对于小白异常友好,有些地方甚至基本原理都补充写明了,百分之99的程序注释不会有我写的这么详细
完整工程文件
采用闭环电流控制,SPWM调制
已上电验证可用,注释详细,逻辑清晰,排版整洁,适合新手学习
另有移相程序看主页,搜索移相程序,或私信我,我发给你链接
开发环境为CCS,适用的DSP型号为TI公司的TMS320F28335,针对其他型号的DSP程序也可以借鉴。
很多编程思路都可以借鉴到其他类型的电力电子变换器的闭环控制程序中
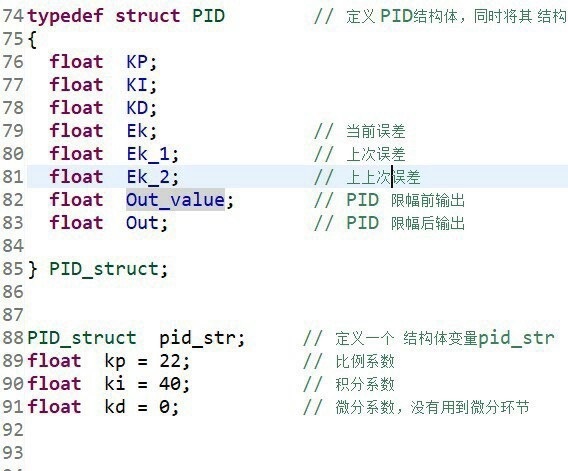
包含:程序说明、ADC采样模块、ePWM模块、PID控制、中断等
注释详细,适合新手学习
YID:665787732383870
爱心资源素材

基于DSP28335逆变器程序,单相全桥逆变器程序,采用双极性调制
在电力电子领域中,逆变器是非常重要的设备之一。逆变器的主要功能是将直流电能转换为交流电能,广泛应用于电网、电动汽车等领域。作为一款基于DSP28335的逆变器程序,该单相全桥逆变器程序采用了双极性调制技术,具有清晰的程序逻辑和详细的注释,几乎每一句代码都有注释,非常友好于初学者。相比其他类似的逆变器程序,该程序注释的详细程度达到了99%以上。
该程序提供了完整的工程文件,包括了ADC采样模块、ePWM模块、PID控制、中断等多个模块。这些模块的注释也非常详细,逻辑清晰,排版整洁,非常适合新手学习。另外,该程序还采用了闭环电流控制和SPWM调制技术,通过这些技术的应用,实现了对逆变器的稳定控制。经过上电验证,该程序在实际应用中表现出良好的可用性。
如果对移相程序感兴趣,可以通过主页搜索移相程序或私信我获取相关链接。该移相程序是与该逆变器程序相配套的,也是基于DSP28335的,可以借鉴到其他类型的电力电子变换器的闭环控制程序中。与逆变器程序一样,移相程序的注释也非常详细,适合初学者学习。
开发环境方面,该程序采用CCS作为开发环境,适用的DSP型号为TI公司的TMS320F28335。不过,其他型号的DSP程序同样可以借鉴该程序的编程思路。毕竟,在电力电子变换器的闭环控制程序中,许多编程思路是通用的。
综上所述,基于DSP28335的单相全桥逆变器程序是一款具有清晰逻辑和详细注释的优秀程序。它不仅提供了完整的工程文件,而且适合于初学者学习。通过该程序的学习,不仅可以掌握逆变器的闭环电流控制和SPWM调制技术,还可以借鉴到其他类型的电力电子变换器的闭环控制程序中。
以上相关代码,程序地址:http://wekup.cn/787732383870.html















 616
616











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









