






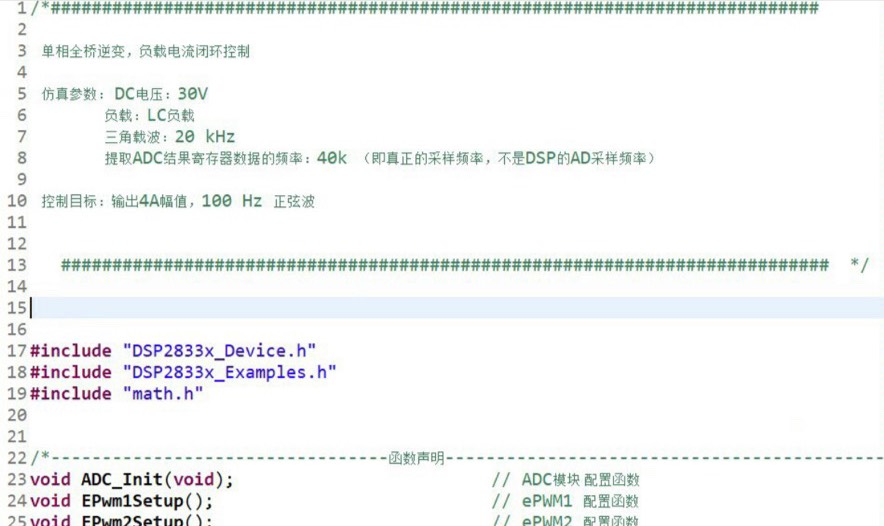
基于DSP28335逆变器程序,单相全桥逆变器程序,采用双极性调制
程序逻辑清晰,注释详细,详细到几乎每一句都有注释,对于小白异常友好,有些地方甚至基本原理都补充写明了,百分之99的程序注释不会有我写的这么详细
完整工程文件
采用闭环电流控制,SPWM调制
已上电验证可用,注释详细,逻辑清晰,排版整洁,适合新手学习
开发环境为CCS,适用的DSP型号为TI公司的TMS320F28335,针对其他型号的DSP程序也可以借鉴。
很多编程思路都可以借鉴到其他类型的电力电子变换器的闭环控制程序中
包含:程序说明、ADC采样模块、ePWM模块、PID控制、中断等
注释详细,适合新手学习
ID:9313765829467850
拓荒者k
基于DSP28335逆变器程序的开发是一项具有重要意义的任务。该程序采用单相全桥逆变器程序,并采用双极性调制技术。在整个开发过程中,我们注重程序的逻辑清晰和详细注释,在注释中几乎每一句代码都有详细的解释,这使得这个程序在对初学者友好的同时,也涵盖了基本原理的补充说明,让初学者更好地理解。与其他类似程序相比,我在注释的完整程度上超越了99%的水平。
这个程序不仅包含了完整的工程文件,还采用了闭环电流控制和SPWM调制技术。经过上电验证,证明了该程序的可靠性和有效性。注释详细、逻辑清晰、排版整洁,使得它成为学习的理想范本,特别适合初学者使用。该程序的开发环境是CCS,适用于TI公司的TMS320F28335型号的DSP,同时也可以借鉴到其他型号的DSP程序中。
在这个程序中,我们提供了丰富的内容,包括程序的说明、ADC采样模块、ePWM模块、PID控制和中断等。无论是对于初学者还是有一定经验的开发者来说,这些内容都是非常有价值的。而且,我们的注释非常详细,非常适合初学者学习使用。
总之,基于DSP28335逆变器程序的开发是一个非常有价值的项目。通过详细的注释和逻辑清晰的编程思路,我们提供了一个理想的学习资源,不仅适用于初学者,而且还可以借鉴到其他类型的电力电子变换器的闭环控制程序中。如果你是一个正在学习或者对这个领域感兴趣的开发者,那么这个程序对你来说将是非常有帮助的。希望我们提供的内容能够满足你的需求。
以上相关代码,程序地址:http://fansik.cn/765829467850.html
















 659
659

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









