







 本文详述了基于STM32F103ZE的扫地机器人设计,包括弓字形行进、避障、WiFi控制等功能。微控制器协调各模块工作,传感器模块含红外线避障和超声波测距,电机驱动使用步进电机,WiFi模块采用ESP8266,人机交互具备按键和显示屏。软件算法涉及前进模式、避障策略及远程控制。
本文详述了基于STM32F103ZE的扫地机器人设计,包括弓字形行进、避障、WiFi控制等功能。微控制器协调各模块工作,传感器模块含红外线避障和超声波测距,电机驱动使用步进电机,WiFi模块采用ESP8266,人机交互具备按键和显示屏。软件算法涉及前进模式、避障策略及远程控制。
扫地机器人 基于stm32f103ze扫地机器人程序,基于整点原子精英版例程修改。
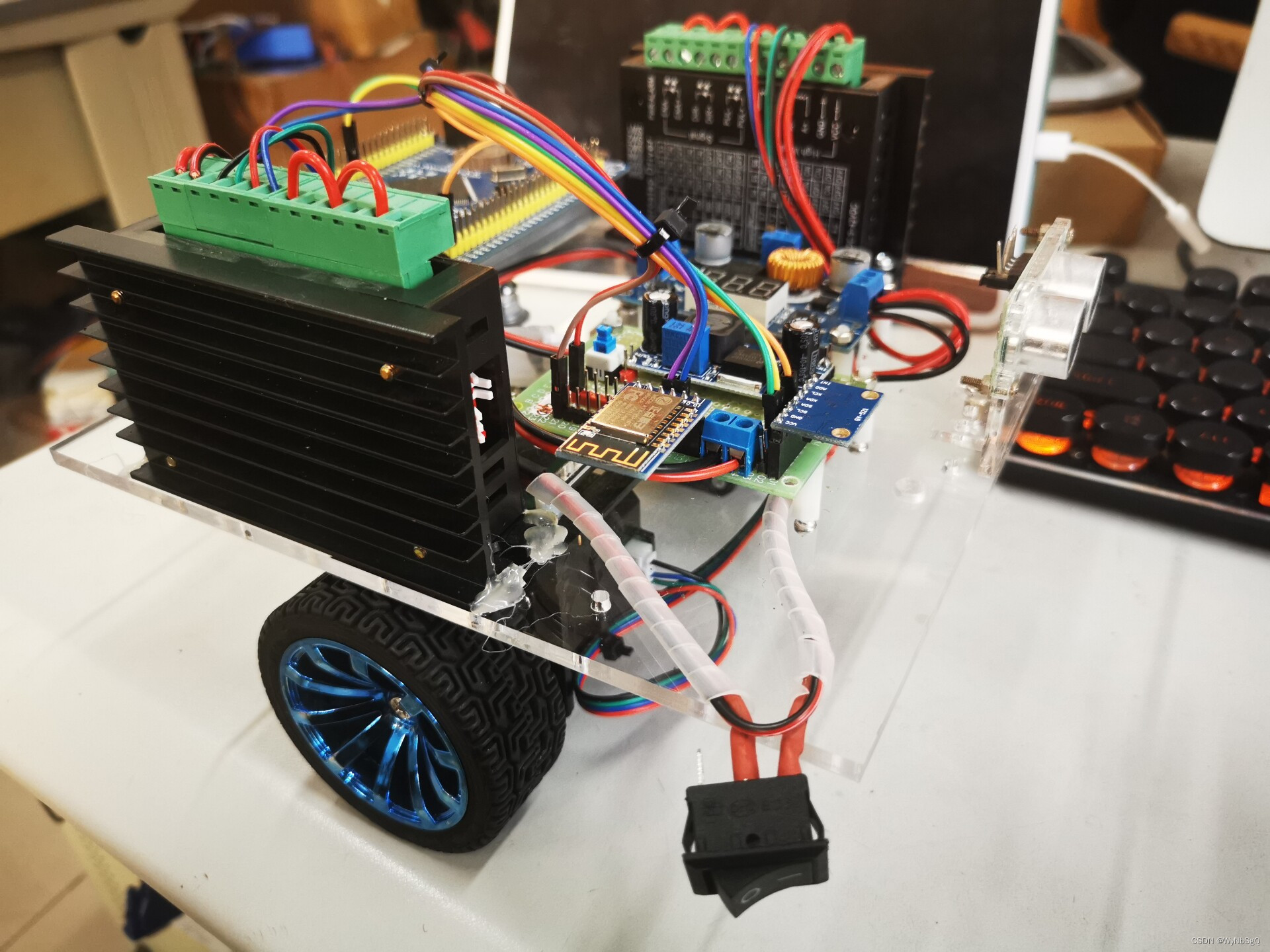
本产品主要实现的是机器人自动弓字形前进,遇到障碍物避障并继续,WiFi控制整个过程,同时可一键回到初始位置。
步进电机+超声波避障+弓字形行进+WIFI控制+一建启动一建回到初始位置。
包含的电子资料见图(不含实物)。
深入探讨:基于STM32F103ZE的扫地机器人程序设计与实现
本文将详细分析基于STM32F103ZE微控制器的扫地机器人程序设计与实现。在此过程中,我们将根据整体架构、硬件设计、软件算法等多个层面进行深入探讨,以展示如何实现一种高效、稳定的扫地机器人。
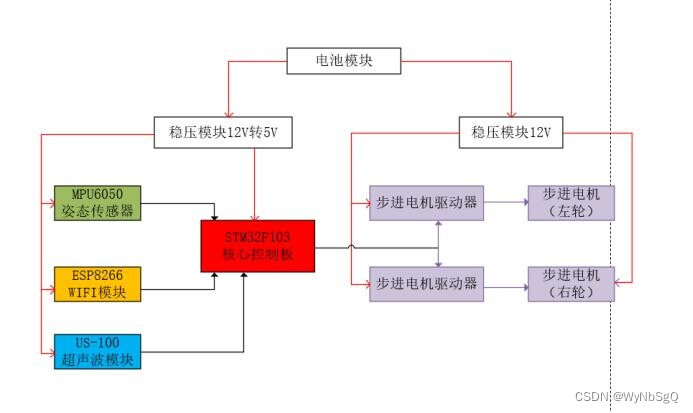
一、系统整体架构
基于STM32F103ZE的扫地机器人主要包括以下几个模块:微控制器模块、传感器模块、电机驱动模块、WiFi模块以及人机交互模块。其中ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









