






全局规划算法
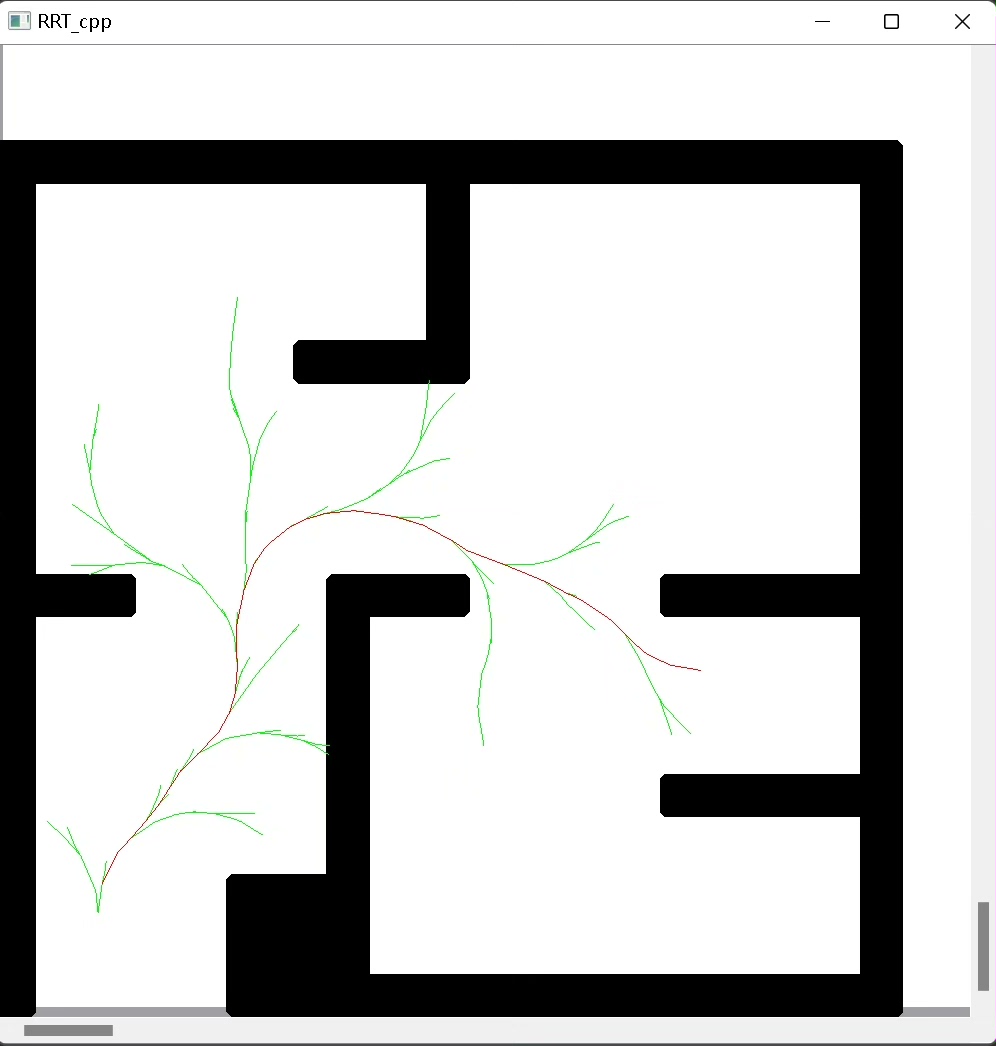
rrt+dubins规划
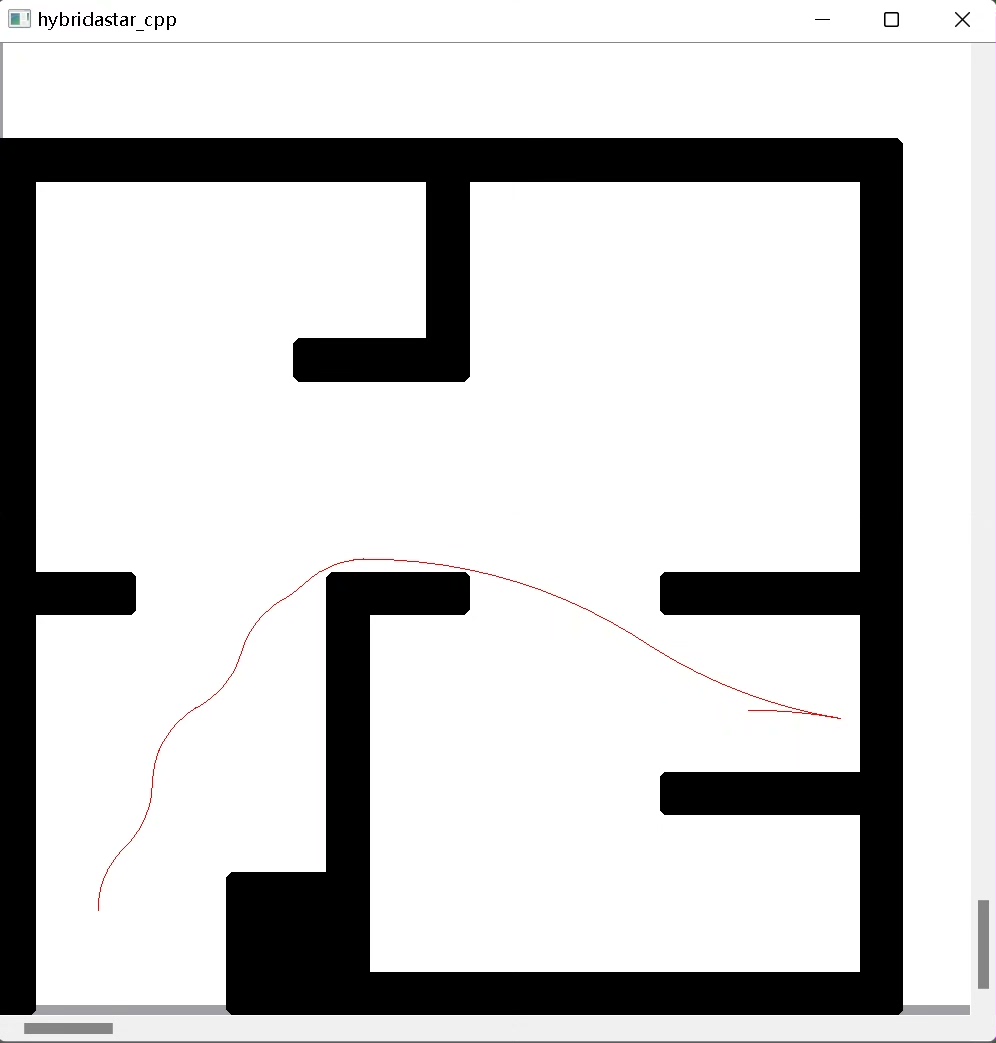
hybrid astar规划
c++实现栅格地图,状态空间,状态校验,RRT搜索算法 混合a星规划算法
ID:8689717795263487
autorobot
全局规划算法是在机器人路径规划中非常重要的一部分。路径规划是指确定如何从起始点到达目标点的最优路径,以使机器人能够有效地避开障碍物和不可行走的区域。现代路径规划算法有许多种,其中著名的有RRT(Rapidly-exploring Random Tree)和A*(A Star)算法。最近几年,由于机器人领域的发展和需求的日益增加,一种新型的全局规划算法——混合A*规划算法逐渐引起了人们的注意。
RRT是一种基于树结构的随机采样算法,它通过不断扩展树的节点来探索整个环境。与传统的基于图搜索的方法相比,RRT算法能够在高维空间中进行有效的路径探索。然而,RRT算法在处理复杂环境时存在一些局限性,尤其是在存在多个障碍物时,可能会导致路径不够优化。为了克服这一问题,研究人员提出了RRT+Dubins规划算法。
Dubins曲线是一种特殊的最短路径曲线,它由两个圆弧和一条直线组成。RRT+Dubins规划算法将RRT和Dubins曲线相结合,通过在RRT树上引入Dubins曲线来生成全局路径。相比传统的RRT算法,RRT+Dubins规划算法能够更好地适应复杂环境,并生成更优化的路径。这一算法在无人机飞行、自动驾驶等领域中得到了广泛应用。
另一种重要的全局规划算法是混合A算法。A算法是一种启发式搜索算法,它通过评估当前节点与目标节点之间的代价函数来选择下一个节点。然而,传统的A算法在高维状态空间中会受到维度灾难的困扰。为了解决这个问题,混合A算法引入了离散状态空间和连续状态空间的概念。在混合A*算法中,离散状态空间用于搜索路径的粗略规划,而连续状态空间用于路径的优化和细化。
在C++中实现栅格地图、状态空间和状态校验是实现全局规划算法的关键。栅格地图是一种将环境划分为网格的方法,它能够方便地进行路径规划和碰撞检测。状态空间是指机器人在运动过程中可能处于的各种状态,包括位置、速度、朝向等信息。状态校验是指检查某一状态是否可行的过程,它可以用来判断机器人是否与障碍物相交或越界。在C++中,可以使用类和数据结构来实现栅格地图、状态空间和状态校验,通过定义相应的函数和方法来实现全局规划算法。
综上所述,全局规划算法在机器人路径规划中起着至关重要的作用。RRT+Dubins规划算法和混合A*规划算法是近年来新兴的全局规划算法,它们通过引入新的思想和技术,克服了传统算法的局限性,并在实际应用中取得了较好的效果。在C++中实现栅格地图、状态空间和状态校验是实现全局规划算法的关键,通过合理设计类和数据结构,以及定义相应的函数和方法,可以实现高效、准确的路径规划。未来,随着技术的进一步发展和应用场景的拓展,全局规划算法将在各个领域发挥更加重要的作用。
【相关代码,程序地址】:http://fansik.cn/717795263487.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









