






多智能体自适应时变编队跟踪控制;编队跟踪;多智能体;观测器
ID:96199717807193638
诚信第一


多智能体自适应时变编队跟踪控制技术在近年来得到了广泛的研究和应用。随着无人系统的快速发展,多智能体系统在各个领域中扮演着越来越重要的角色。多智能体编队控制是指一组智能体通过合作与协调,形成特定的编队结构并达到预定的任务目标。本文着重讨论多智能体自适应时变编队跟踪控制技术的研究进展和应用场景。
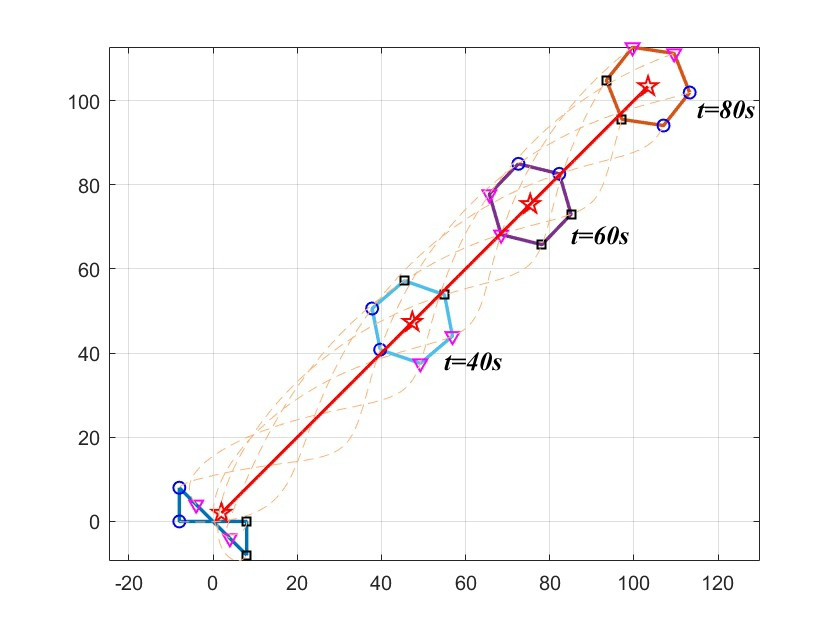
首先,我们需要明确什么是多智能体编队跟踪。多智能体编队跟踪是指通过合理的控制策略,使得多个无人系统在一定的约束条件下,能够在复杂的环境中实现对目标的跟踪和协同工作。这对于无人系统的自主导航和任务执行至关重要。
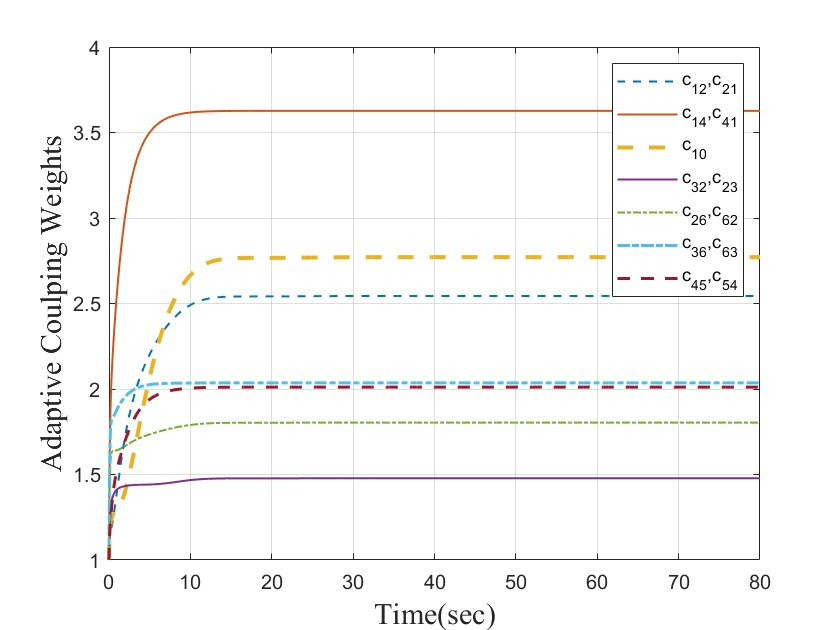
多智能体编队跟踪的核心技术是自适应时变控制。自适应时变控制是一种基于模型参考自适应控制策略,可以适应系统的外部环境变化和内部参数变化,实现对目标的精准跟踪。具体而言,通过引入自适应观测器,可以实时估计系统的状态变量,从而实现对目标运动的跟踪和控制。
在多智能体编队控制中,观测器起到了至关重要的作用。观测器是一种用于估计系统未知状态的动力学模型。通过观测器,可以实时估计系统的状态变量,从而实现对目标的跟踪和控制。自适应时变编队控制技术中,观测器的设计和优化是一个研究热点。
针对多智能体自适应时变编队跟踪控制,研究者们提出了多种不同的方法和算法。其中,基于模型参考自适应控制算法是最为常见和有效的一种方法。该算法通过引入自适应观测器,实时估计系统的状态变量,并根据参考模型的要求,对系统进行控制。此外,还有一些基于神经网络和模糊控制的方法,具有一定的应用潜力。
多智能体编队跟踪控制技术具有广泛的应用前景。在机器人领域,多智能体编队控制可以应用于无人机编队飞行、无人车协同行驶等场景。在智能制造领域,多智能体编队控制可以应用于机器人协作装配、自动化仓储物流等任务。在军事领域,多智能体编队控制可以应用于无人侦察、无人战斗等作战任务。
总之,多智能体自适应时变编队跟踪控制技术在无人系统中具有重要的应用价值。通过合理的控制策略和自适应观测器的设计,可以实现对目标的精准跟踪和协同工作。未来,随着无人系统技术的不断发展,多智能体编队控制技术将在更多领域中得到应用,并发挥重要的作用。
【相关代码,程序地址】:http://fansik.cn/717807193638.html
















 1692
1692











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









