




碎碎念~
参加工作2年了,从最初的自动化运动控制应用,转工业上位机软件开发,再到现在的新工作,接触自动化行业也是很久了,始终觉得自己没有安身立命的根本,因为感觉自己一直停留在“应用”的Level上,而不是真正的研发人员,而所谓“应用”的可替代性hhhh。
新工作主要是使用了IGH主站+xenomai实时系统以实现对EtherCAT的从站进行通讯控制,公司的产品就不再赘述了,也没有太大意义,因为公司的代码都是十几年前的老古董了,又臭又长,导致我看起来完全没有头绪,实在无奈,在CSDN上游荡许久,参考各位前辈的博客,终于初步学会了IGH+xenomai是如何保证实时性并且实现对EtherCAT从站的通讯的,写这一篇主要是为了分享和有一个记录吧。
开始吧!!
运行环境
直接用的公司的工控机了,至于版本这种东西其实无需太过纠结,如何安装我相信大家都可以找到答案。主要是知道你的IGH和xenomai的库到底被你放哪里就可以了。
我的环境:Ubuntu16.04+linux3.16.7+xenomai2.6.5+IGH1.5.2
测试目标
每一个嵌入式开发人员都是从点亮一个LED开始的,每一个程序员都是从打印helloworld开始的,对于EtherCAT从站,最简单的方法应该就是实现对一个IO从站的点位输出吧(毕竟IO模块都带灯),这也是一种点灯!处于分享和记录的原则,我直接在下方贴上我的完整代码吧。
硬件部分
由于主站就是工控机的IGH主站了,就是说一下从站,目前就是连接了几个BeckHoff的耦合器+IO模块,相信自动化行业的各位都很熟悉了
从站:EK1100+El1008+El1008+El2008,耦合器+8位输入IO模块*2+8位输出IO模块。所以实际上就是4个slaves啦。
代码部分
#include <errno.h>
#include <signal.h>
#include <stdio.h>
#include <string.h>
#include <sys/resource.h>
#include <sys/time.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/mman.h>
#include <rtdm/rtdm.h>
#include <native/task.h>
#include <native/sem.h>
#include <native/mutex.h>
#include <native/timer.h>
#include <rtdk.h>
#include <pthread.h>
#include "ecrt.h"
RT_TASK my_task;
static int run = 1;
/****************************************************************************/
// EtherCAT
static ec_master_t* master = NULL;
static ec_master_state_t master_state = {};
static ec_domain_t* domain1 = NULL;
static ec_domain_state_t domain1_state = {};
static uint8_t* domain1_pd = NULL;
static ec_slave_config_t* sc_el1008_1 = NULL;
static ec_slave_config_t* sc_el1008_2 = NULL;
static ec_slave_config_t* sc_el2008_1 = NULL;
/****************************************************************************/
// process data
#define BusCoupler01_Pos 0, 0
#define DigInSlave01_Pos 0, 1
#define DigInSlave02_Pos 0, 2
#define DigOutSlave03_Pos 0, 3
#define Beckhoff_EK1100 0x00000002, 0x044c2c52
#define Beckhoff_EL1008 0x00000002, 0x03f03052
#define Beckhoff_EL2008 0x00000002, 0x07d83052
// offsets for PDO entries 所谓偏移,也相当于一个操作符号,不需要去写初始化,用户层只使用其地址
static unsigned int off_dig_in0;
static unsigned int off_dig_in1;
static unsigned int off_dig_out0;
// process data
const static ec_pdo_entry_reg_t domain1_regs[] = {
{DigInSlave01_Pos, Beckhoff_EL1008, 0x6000, 0x01, &off_dig_in0, NULL},
{DigInSlave02_Pos, Beckhoff_EL1008, 0x6000, 0x01, &off_dig_in1, NULL},
{DigOutSlave03_Pos, Beckhoff_EL2008, 0x7000, 0x01, &off_dig_out0, NULL},
{}
};
/****************************************************************************/
/* Master 0, Slave 1, "EL1008"
* Vendor ID: 0x00000002
* Product code: 0x03f03052
* Revision number: 0x00110000
*/
ec_pdo_entry_info_t slave_1_pdo_entries[] = {
{0x6000, 0x01, 1}, /* Input */
{0x6010, 0x01, 1}, /* Input */
{0x6020, 0x01, 1}, /* Input */
{0x6030, 0x01, 1}, /* Input */
{0x6040, 0x01, 1}, /* Input */
{0x6050, 0x01, 1}, /* Input */
{0x6060, 0x01, 1}, /* Input */
{0x6070, 0x01, 1}, /* Input */
};
ec_pdo_info_t slave_1_pdos[] = {
{0x1a00, 1, slave_1_pdo_entries + 0}, /* Channel 1 */
{0x1a01, 1, slave_1_pdo_entries + 1}, /* Channel 2 */
{0x1a02, 1, slave_1_pdo_entries + 2}, /* Channel 3 */
{0x1a03, 1, slave_1_pdo_entries + 3}, /* Channel 4 */
{0x1a04, 1, slave_1_pdo_entries + 4}, /* Channel 5 */
{0x1a05, 1, slave_1_pdo_entries + 5}, /* Channel 6 */
{0x1a06, 1, slave_1_pdo_entries + 6}, /* Channel 7 */
{0x1a07, 1, slave_1_pdo_entries + 7}, /* Channel 8 */
};
ec_sync_info_t slave_el1008_syncs[] = {
{0, EC_DIR_INPUT, 8, slave_1_pdos + 0, EC_WD_ENABLE},
{0xff}
};
/* Master 0, Slave 3, "EL2008"
* Vendor ID: 0x00000002
* Product code: 0x07d83052
* Revision number: 0x00110000
*/
ec_pdo_entry_info_t slave_3_pdo_entries[] = {
{0x7000, 0x01, 1}, /* Output */
{0x7010, 0x01, 1}, /* Output */
{0x7020, 0x01, 1}, /* Output */
{0x7030, 0x01, 1}, /* Output */
{0x7040, 0x01, 1}, /* Output */
{0x7050, 0x01, 1}, /* Output */
{0x7060, 0x01, 1}, /* Output */
{0x7070, 0x01, 1} /* Output */
};
ec_pdo_info_t slave_3_pdos[] = {
{0x1600, 1, slave_3_pdo_entries + 0}, /* Channel 1 */
{0x1601, 1, slave_3_pdo_entries + 1}, /* Channel 2 */
{0x1602, 1, slave_3_pdo_entries + 2}, /* Channel 3 */
{0x1603, 1, slave_3_pdo_entries + 3}, /* Channel 4 */
{0x1604, 1, slave_3_pdo_entries + 4}, /* Channel 5 */
{0x1605, 1, slave_3_pdo_entries + 5}, /* Channel 6 */
{0x1606, 1, slave_3_pdo_entries + 6}, /* Channel 7 */
{0x1607, 1, slave_3_pdo_entries + 7}, /* Channel 8 */
};
ec_sync_info_t slave_el2008_syncs[] = {
{0, EC_DIR_OUTPUT, 8, slave_3_pdos + 0, EC_WD_ENABLE},
{0xff}
};
/*****************************************************************************
* Realtime task
****************************************************************************/
void rt_check_domain_state(void)
{
ec_domain_state_t ds = {};
ecrt_domain_state(domain1, &ds);
if (ds.working_counter != domain1_state.working_counter) {
rt_printf("Domain1: WC %u.\n", ds.working_counter);
}
if (ds.wc_state != domain1_state.wc_state) {
rt_printf("Domain1: State %u.\n", ds.wc_state);
}
domain1_state = ds;
}
/****************************************************************************/
void rt_check_master_state(void)
{
ec_master_state_t ms;
ecrt_master_state(master, &ms);
if (ms.slaves_responding != master_state.slaves_responding) {
rt_printf("%u slave(s).\n", ms.slaves_responding);
}
if (ms.al_states != master_state.al_states) {
rt_printf("AL states: 0x%02X.\n", ms.al_states);
}
if (ms.link_up != master_state.link_up) {
rt_printf("Link is %s.\n", ms.link_up ? "up" : "down");
}
master_state = ms;
}
/****************************************************************************/
#define _ms 1000000
void my_task_proc(void* arg)
{
int cycle_counter = 0;
unsigned int blink = 0;
rt_task_set_periodic(NULL, TM_NOW, 1 * _ms); // ns
while (cycle_counter < 10000) {
rt_task_wait_period(NULL);
cycle_counter++;
// receive EtherCAT frames
ecrt_master_receive(master);
ecrt_domain_process(domain1);
rt_check_domain_state();
if (!(cycle_counter % 1000)) {
rt_check_master_state();
}
if (!(cycle_counter % 1000)) {
blink = !blink;
printf("blink...\n");
}
EC_WRITE_U8(domain1_pd + off_dig_out0, blink ? 0xFF : 0x00);
// send process data
ecrt_domain_queue(domain1);
ecrt_master_send(master);
}
run = 0;
}
/****************************************************************************
* Signal handler
***************************************************************************/
void signal_handler(int sig)
{
run = 0;
}
/****************************************************************************
* Main function=
***************************************************************************/
int main(int argc, char* argv[])
{
int ret;
//Perform auto-init of rt_print buffers if the task does not do so
rt_print_auto_init(1);
// rt_print_init(1000,"LEE_RT");
signal(SIGTERM, signal_handler);
signal(SIGINT, signal_handler);
mlockall(MCL_CURRENT | MCL_FUTURE);
printf("Requesting master...\n");
master = ecrt_request_master(0);
if (!master) {
return -1;
}
printf("Creating slave configurations...\n");
// Create configuration for bus coupler EK1100
ec_slave_config_t* sc;
sc = ecrt_master_slave_config(master, BusCoupler01_Pos, Beckhoff_EK1100);
if (!sc) {
return -1;
}
//获从站服配置
sc_el1008_1 = ecrt_master_slave_config(master, DigInSlave01_Pos, Beckhoff_EL1008);
sc_el1008_2 = ecrt_master_slave_config(master, DigInSlave02_Pos, Beckhoff_EL1008);
sc_el2008_1 = ecrt_master_slave_config(master, DigOutSlave03_Pos, Beckhoff_EL2008);
//过程数据SM配置
ecrt_slave_config_pdos(sc_el1008_1, EC_END, slave_el1008_syncs);
ecrt_slave_config_pdos(sc_el1008_2, EC_END, slave_el1008_syncs);
ecrt_slave_config_pdos(sc_el2008_1, EC_END, slave_el2008_syncs);
//创建过程数据域
domain1 = ecrt_master_create_domain(master);
ecrt_domain_reg_pdo_entry_list(domain1, domain1_regs);
printf("Activating master...\n");
ecrt_master_activate(master);
if (!(domain1_pd = ecrt_domain_data(domain1))) {
fprintf(stderr, "Failed to get domain1 data pointer.\n");
return -1;
}
ret = rt_task_create(&my_task, "my_task", 0, 99, T_FPU);
if (ret < 0) {
fprintf(stderr, "Failed to create task: %s\n", strerror(-ret));
return -1;
}
printf("Starting my_task...\n");
ret = rt_task_start(&my_task, &my_task_proc, NULL);
if (ret < 0) {
fprintf(stderr, "Failed to start task: %s\n", strerror(-ret));
return -1;
}
while (run) {
sched_yield();
}
printf("Deleting realtime task...\n");
rt_task_delete(&my_task);
printf("End of Program\n");
ecrt_release_master(master);
return 0;
}
如何编译运行
唉,以前没有接触过linux,对于linux中的.c文件和头文件包含简直就是一头雾水,不过在ai无比强大的今天,我还是让AI帮我写了一个makefile,我只是提供了,当然也参考了站中大佬的博客,下面是我的makefile,其中IGH和xenomai的include和lib库的位置,文件名需要按照自己的环境和.c文件替换就好了。
# 编译器
CC = gcc
# 宏定义
DEFINES = -D_GNU_SOURCE -D_REENTRANT -D__XENO__
# 包含路径
INCPATH = -I/usr/xenomai/include \
-I/opt/etherlab/include
# 库路径和链接库
LIBS = -L/usr/xenomai/lib -L/opt/etherlab/lib \
-lethercat_rtdm \
-lrtdm -lpthread_rt -lnative -lxenomai \
-lpthread -lrt -lm
# 链接标志(如使用 posix.wrappers)
LFLAGS = -Wl,@/usr/xenomai/lib/posix.wrappers
# C 编译标志
CFLAGS = $(DEFINES) $(INCPATH) -Wall -Wextra -g
# 这里就是需要更改的两处地方啦,我的文件是IOtest.c,自己按需修改吧
# 目标可执行文件名
TARGET = IOtest
# 源文件和对象文件
SOURCES = IOtest.c
OBJECTS = $(SOURCES:.c=.o)
# 默认目标
all: $(TARGET)
# 链接规则
$(TARGET): $(OBJECTS)
$(CC) $(LFLAGS) -o $@ $^ $(LIBS)
# 编译规则
%.o: %.c
$(CC) $(CFLAGS) -c $< -o $@
# 清理规则
clean:
rm -f $(OBJECTS) $(TARGET)
# 伪目标
.PHONY: all clean怎么使用makefile文件这个应该无需再讲,我们直接到下一步吧!建一个文件夹把.c和makefile文件放进去就好了,直接sudo make
编译完成后直接运行可执行文件
点灯!!!(IO输出模块)
程序中关于IO模块的控制部分其实就是这里
if (!(cycle_counter % 1000)) {
rt_check_master_state();
}
if (!(cycle_counter % 1000)) {
blink = !blink;
printf("blink...\n");
}
EC_WRITE_U8(domain1_pd + off_dig_out0, blink ? 0xFF : 0x00);每1s取反blink,将0xFF或者0x00发送给EL2008模块的PDO条目就好啦。
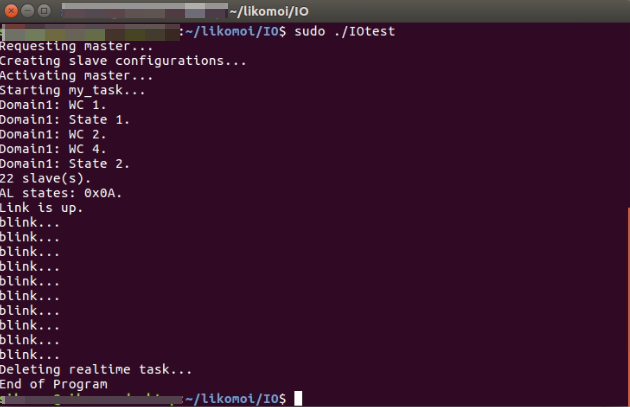
最终效果
贴一个命令行打印信息吧。

















 463
463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









