






在上节课工程基础上加入中断与DMA
DAM可以为CPU搬运数据,为CPU省出更多的时间并且使用起来非常简单
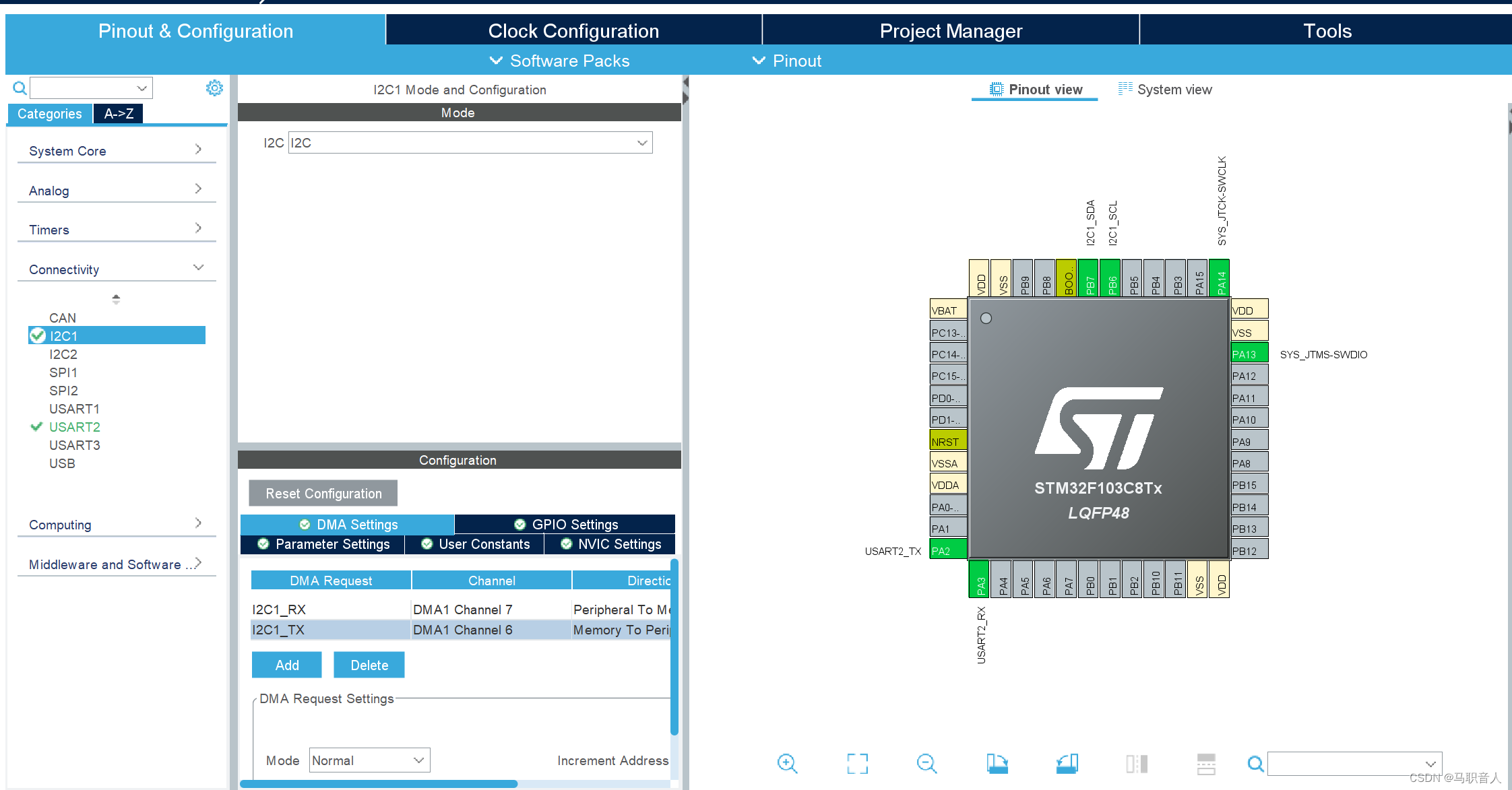
1、工程配置
2、代码
aht20.h
/*
* aht20.h
*
* Created on: Apr 25, 2024
* Author: lenovo
*/
#ifndef INC_AHT20_H_
#define INC_AHT20_H_
#include "i2c.h"
void AHT20_Init ();
void AHT20_Read(float *Temperature , float *Humidity);
void AHT20_Measure();
void AHT20_Get();
void AHT20_Analysis(float *Temperature , float *Humidity);
#endif /* INC_AHT20_H_ */
aht20.c
#include "aht20.h"
#define AHT20_ADDRESS 0x70 // 从机地址
uint8_t readBuffer [6] = {0};
//AHT20 的驱动程序
void AHT20_Init () //AHT20初始化函数 记住要在"aht20.h"中声明
{
uint8_t readBuffer;//用于接收状态信息
HAL_Delay(40);
HAL_I2C_Master_Receive(&hi2c1, AHT20_ADDRESS, &readBuffer, 1, HAL_MAX_DELAY);//I2C读取函数,读数据函数 readBuffer此时获得了一个字节的状态字。
if((readBuffer & 0x08) == 0x00) //判断第三位是否为0 发送0xBE命令初始化
{
uint8_t sendBuffer [3] = {0xBE , 0x08 , 0x00};
HAL_I2C_Master_Transmit(&hi2c1, AHT20_ADDRESS, sendBuffer, 3, HAL_MAX_DELAY);//I2C发送函数
}
}
void AHT20_Read(float *Temperature , float *Humidity) //AHT20读取温度湿度函数 记住要在"aht20.h"中声明
{
uint8_t sendBuffer [3] = {0xAC , 0x33 , 0x00};
uint8_t readBuffer [6] = {0};
HAL_I2C_Master_Transmit_DMA(&hi2c1, AHT20_ADDRESS, sendBuffer, 3);//中断
HAL_Delay(75);
HAL_I2C_Master_Receive_DMA(&hi2c1, AHT20_ADDRESS, readBuffer, 6);//中断
if((readBuffer[0] & 0x80) == 0x00)
{
uint32_t date = 0;//接收温湿度需要2个半字节 所以要32
date = ((uint32_t )readBuffer[3] >> 4) + ((uint32_t )readBuffer[2] << 4) + ((uint32_t )readBuffer[1] << 12);//对数据进行移位拼接.
*Humidity = date * 100.0f / (1 << 20);//(1 << 20) 意为2的20次方. 乘100.0可以表示为百分数
date = (((uint32_t )readBuffer[3] & 0x0F)<< 16) + ((uint32_t )readBuffer[4] << 8) + (uint32_t )readBuffer[5];//& 0x0F: 将这个无符号整数与十六进制数0x0F进行按位与操作。0x0F的二进制表示为00001111,这个操作会保留readBuffer[3]的低四位,即将高四位清零。
*Temperature = date * 200.0f / (1 << 20) - 50;
}
}
// 分为三部:发送测量指令,数据读取 ,数据解析
void AHT20_Measure()//发送测量指令
{
static uint8_t sendBuffer [3] = {0xAC , 0x33 , 0x00};//别忘了uint8_t
HAL_I2C_Master_Transmit_IT(&hi2c1, AHT20_ADDRESS, sendBuffer, 3);
}
void AHT20_Get()//数据读取
{
HAL_I2C_Master_Receive_IT(&hi2c1, AHT20_ADDRESS, readBuffer, 6);
}
void AHT20_Analysis(float *Temperature , float *Humidity)//数据解析
{
if((readBuffer[0] & 0x80) == 0x00)
{
uint32_t date = 0;//接收温湿度需要2个半字节 所以要32
date = ((uint32_t )readBuffer[3] >> 4) + ((uint32_t )readBuffer[2] << 4) + ((uint32_t )readBuffer[1] << 12);//对数据进行移位拼接.
*Humidity = date * 100.0f / (1 << 20);//(1 << 20) 意为2的20次方. 乘100.0可以表示为百分数
date = (((uint32_t )readBuffer[3] & 0x0F)<< 16) + ((uint32_t )readBuffer[4] << 8) + (uint32_t )readBuffer[5];//& 0x0F: 将这个无符号整数与十六进制数0x0F进行按位与操作。0x0F的二进制表示为00001111,这个操作会保留readBuffer[3]的低四位,即将高四位清零。
*Temperature = date * 200.0f / (1 << 20) - 50;
}
}
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "dma.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "i2c.h"
#include <stdio.h>
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//0 : 初始状态 发送测量命令 1: 正在发送命令 2 :命令发送完成 3:读取 4 :读取完成 解析并展示数据后恢复到初始状态
uint8_t aht20state = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_I2C1_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
AHT20_Init ();//初始化AHT20
float temperature , humidity ;
char message [50];
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
//写状态机代码
if(aht20state == 0)// 0 : 初始状态 发送测量指令
{
AHT20_Measure();
aht20state = 1;
} else if(aht20state == 2)
{
HAL_Delay(75);
AHT20_Get();
aht20state = 3;
}else if(aht20state == 4)
{
AHT20_Analysis(&temperature , &humidity);
sprintf(message ,"温度: %.lf ℃ , 湿度: %.lf %%\r\n",temperature , humidity);//拼接
HAL_UART_Transmit(&huart2, (uint8_t*)message,strlen(message) , HAL_MAX_DELAY);//串口发�?�数据函�?
HAL_Delay(1000);
aht20state = 0; //恢复到初始状态
}
//AHT20_Read( &temperature , &humidity); //读取AHT20
//sprintf(message ,"温度: %.lf �? , 湿度: %.lf %%\r\n",temperature , humidity);//拼接
//HAL_UART_Transmit(&huart2, (uint8_t*)message,strlen(message) , HAL_MAX_DELAY);//串口发�?�数据函�?
//HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
main.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.h
* @brief : Header for main.c file.
* This file contains the common defines of the application.
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __MAIN_H
#define __MAIN_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "stm32f1xx_hal.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Exported types ------------------------------------------------------------*/
/* USER CODE BEGIN ET */
/* USER CODE END ET */
/* Exported constants --------------------------------------------------------*/
/* USER CODE BEGIN EC */
extern uint8_t aht20state;
/* USER CODE END EC */
/* Exported macro ------------------------------------------------------------*/
/* USER CODE BEGIN EM */
/* USER CODE END EM */
/* Exported functions prototypes ---------------------------------------------*/
void Error_Handler(void);
/* USER CODE BEGIN EFP */
/* USER CODE END EFP */
/* Private defines -----------------------------------------------------------*/
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
#ifdef __cplusplus
}
#endif
#endif /* __MAIN_H */
i2c.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file i2c.c
* @brief This file provides code for the configuration
* of the I2C instances.
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "i2c.h"
/* USER CODE BEGIN 0 */
void HAL_I2C_MasterTxCpltCallback(I2C_HandleTypeDef *hi2c)//
{
if(hi2c == &hi2c1)
{
aht20state = 2;
}
}
void HAL_I2C_MasterRxCpltCallback(I2C_HandleTypeDef *hi2c)//
{
if(hi2c == &hi2c1)
{
aht20state = 4;
}
}
/* USER CODE END 0 */
I2C_HandleTypeDef hi2c1;
DMA_HandleTypeDef hdma_i2c1_rx;
DMA_HandleTypeDef hdma_i2c1_tx;
/* I2C1 init function */
void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
void HAL_I2C_MspInit(I2C_HandleTypeDef* i2cHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(i2cHandle->Instance==I2C1)
{
/* USER CODE BEGIN I2C1_MspInit 0 */
/* USER CODE END I2C1_MspInit 0 */
__HAL_RCC_GPIOB_CLK_ENABLE();
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* I2C1 clock enable */
__HAL_RCC_I2C1_CLK_ENABLE();
/* I2C1 DMA Init */
/* I2C1_RX Init */
hdma_i2c1_rx.Instance = DMA1_Channel7;
hdma_i2c1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_i2c1_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_i2c1_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_i2c1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_i2c1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_i2c1_rx.Init.Mode = DMA_NORMAL;
hdma_i2c1_rx.Init.Priority = DMA_PRIORITY_LOW;
if (HAL_DMA_Init(&hdma_i2c1_rx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(i2cHandle,hdmarx,hdma_i2c1_rx);
/* I2C1_TX Init */
hdma_i2c1_tx.Instance = DMA1_Channel6;
hdma_i2c1_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_i2c1_tx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_i2c1_tx.Init.MemInc = DMA_MINC_ENABLE;
hdma_i2c1_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_i2c1_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_i2c1_tx.Init.Mode = DMA_NORMAL;
hdma_i2c1_tx.Init.Priority = DMA_PRIORITY_LOW;
if (HAL_DMA_Init(&hdma_i2c1_tx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(i2cHandle,hdmatx,hdma_i2c1_tx);
/* I2C1 interrupt Init */
HAL_NVIC_SetPriority(I2C1_EV_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(I2C1_EV_IRQn);
HAL_NVIC_SetPriority(I2C1_ER_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(I2C1_ER_IRQn);
/* USER CODE BEGIN I2C1_MspInit 1 */
/* USER CODE END I2C1_MspInit 1 */
}
}
void HAL_I2C_MspDeInit(I2C_HandleTypeDef* i2cHandle)
{
if(i2cHandle->Instance==I2C1)
{
/* USER CODE BEGIN I2C1_MspDeInit 0 */
/* USER CODE END I2C1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_I2C1_CLK_DISABLE();
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_6);
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_7);
/* I2C1 DMA DeInit */
HAL_DMA_DeInit(i2cHandle->hdmarx);
HAL_DMA_DeInit(i2cHandle->hdmatx);
/* I2C1 interrupt Deinit */
HAL_NVIC_DisableIRQ(I2C1_EV_IRQn);
HAL_NVIC_DisableIRQ(I2C1_ER_IRQn);
/* USER CODE BEGIN I2C1_MspDeInit 1 */
/* USER CODE END I2C1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
















 4695
4695











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











