






基于改进动态窗口DWA模糊自适应调整权重的路径规划算法
一、引言
在机器人路径规划领域,动态窗口DWA(Dynamic Window Approach for Local Path Planning)是一种被广泛使用的局部路径规划算法。该算法能有效地帮助机器人在未知环境中避开障碍物并寻找目标点。然而,传统的DWA算法的权重因子需要根据实际环境进行调整,这使得在面对不同环境和任务时,其性能可能会受到影响。为了解决这个问题,本文提出了一种基于模糊自适应调整权重的改进DWA算法,以实现更高效、更灵活的路径规划。
二、模糊评价函数
为了实现自适应调整权重因子,我们首先定义了一个模糊评价函数。该函数是一种能够处理不确定性和模糊性的评价函数,能够将输入值(如距离、航向和速度)映射到模糊隶属度。基于规则的模糊逻辑计算,该函数能输出权重因子。这样,我们就可以根据环境的变化实时调整权重因子,使机器人能够根据实际情况选择最优的路径。
三、改进DWA算法实现过程
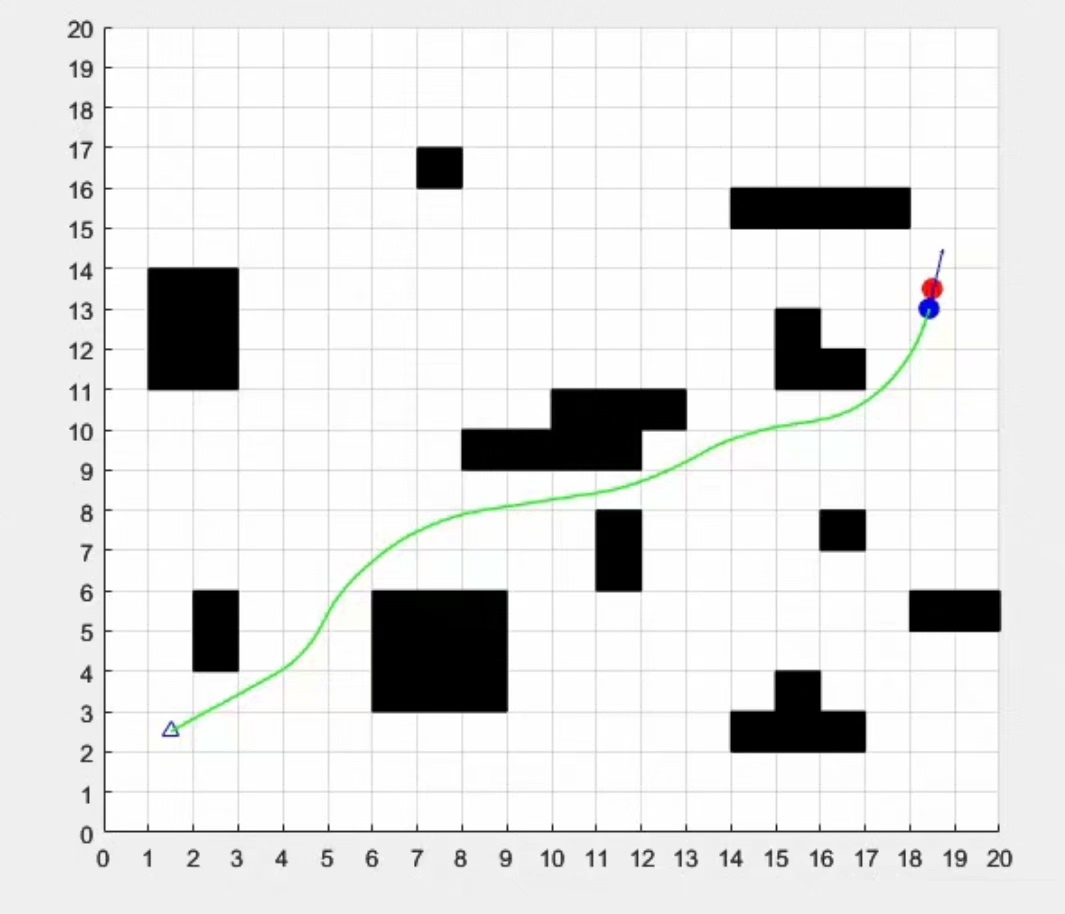
- 栅格地图处理:首先,我们需要对栅格地图进行预处理。这包括根据实际环境设置障碍物和目标点的位置,将地图划分为多个栅格单元。这样,机器人就可以在栅格地图上执行路径规划。
- 生成候选路径:在每个时间步长内,机器人根据当前位置和目标位置生成一组候选路径。
- 计算评价函数值:对于每条候选路径,我们使用模糊评价函数计算其评价函数值。该值取决于距离、航向和速度等参数的权重因子。
- 动态窗口选择:根据评价函数值,我们选择一个或多个候选路径作为机器人的下一个行动方案。这里,我们利用动态窗口方法对机器人的运动进行约束,以保证其能够快速响应环境变化。
- 模糊自适应调整权重因子:在每一步中,我们根据模糊评价函数的输出结果自适应调整权重因子。这样,机器人就能根据环境的变化实时调整其决策策略,以实现最优的路径规划。
- 循环执行:最后,我们重复步骤2至步骤5,直到机器人到达目标位置或达到设定的终止条件。
四、MATLAB源码与文档
关于改进DWA算法的MATLAB源码和文档,我们将详细描述算法的实现过程、输入参数、输出结果以及使用方法。通过这些文档和源码,其他研究人员可以轻松地理解和使用我们的算法。同时,我们还提供了可修改的栅格地图模板,以便研究人员根据实际环境调整地图参数。
五、结论
本文提出了一种基于改进动态窗口DWA的模糊自适应调整权重的路径规划算法。通过定义模糊评价函数并实时调整权重因子,该算法能够在不同环境中实现高效的路径规划。通过MATLAB源码和文档的提供,我们希望这种算法能够在更多领域得到应用和改进。未来,我们将继续研究如何进一步提高算法的性能和灵活性,以应对更复杂的机器人路径规划任务。
基于改进动态窗口 DWA 模糊自适应调整权重的路径基于改进动态窗口 DWA 模糊自适应调整权重的路径规划算法 MATLAB 源码+文档
《栅格地图可修改》
基本DWA算法能够有效地避免碰撞并尽可能接近目标点,但评价函数的权重因子需要根据实际情况进行调整。
为了提高DWA算法的性能,本文提出了一种改进DWA算法,通过模糊控制自适应调整评价因子权重,改进DWA算法的实现过程如下:
定义模糊评价函数。
模糊评价函数是一种能够处理不确定性和模糊性的评价函数。
它将输入值映射到模糊隶属度,根据规则计算输出值。
在改进DWA算法中,我们定义了一个三输入一输出的模糊评价函数,输入包括距离、航向和速度,输出为权重因子。
[1]实时调整权重因子。
在基本DWA算法中,权重因子需要根据实际情况进行调整,这需要人工干预。
在改进DWA算法中,我们通过模糊控制实现自适应调整,以提高算法的性能。
[2]评估路径。
通过路径的长度和避障情况等指标评估路径的优劣,并记录最优路径。
[3]更新权重因子。
根据评估结果,更新权重因子,使评价函数更加符合实际情况。
重新规划路径。
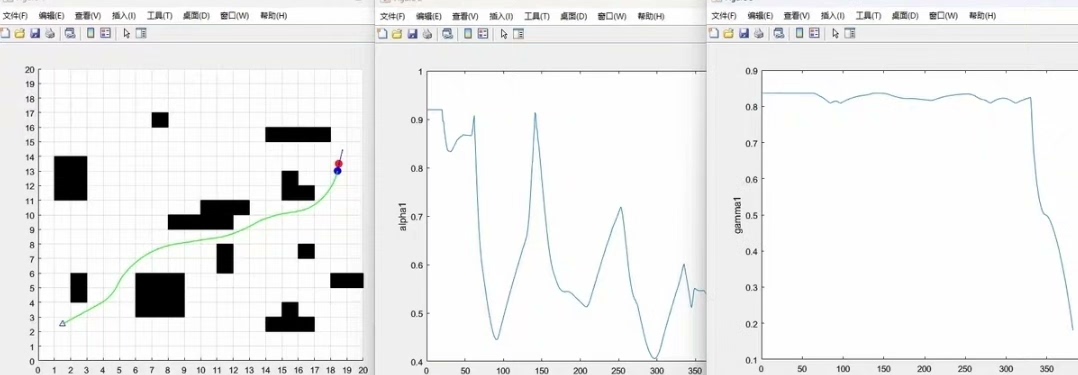
基于新的权重因子重新规划路径,并绘制路径和权重因子的变化。
通过以上步骤,我们实现了一种基于模糊控制自适应调整评价因子权重的改进DWA算法。
该算法能够自动调整权重因子,提高路径规划的性能,同时保证路径的安全性和有效性。
————————————————
改进动态窗口DWA算法,模糊控制自适应调整评价因子权重,matlab代码,
这段代码是一个基于动态窗口法(Dynamic Window Approach,DWA)的路径规划算法的实现。
下面我将对代码进行分析,并解释算法的优势、需要注意的地方以及独特算法所用到的内容。
首先,代码开始时定义了一个地图map0,表示机器人的运动环境。
地图中的0表示可通行的区域,1表示障碍物。
接着,代码对地图进行了旋转,以保证地图和预期设置的地图一致。
然后,获取了地图的高度和宽度。
接下来,代码设置了绘图的参数,并绘制了地图中的障碍物。
障碍物的坐标保存在obstacle数组中。
然后,代码定义了起始点和目标点,并在图中绘制了起始点和目标点。
接着,代码计算了机器人的初始航向角,使其朝向目标点,以防止陷入局部最优。
然后,定义了机器人的状态,包括位置、航向、线速度和角速度。
代码中的dt表示仿真步长,predictT表示前向模拟时间。
obs表示障碍物的坐标数组,collisionR表示碰撞半径。
接下来,代码定义了运动学的限制,包括最高速度、角速度、加速度、角加速度以及线速度和角速度的分辨率。
evalParam表示评价函数的参数,包括航向、距离和速度的权重。
maxStep表示最大仿真步长。
最后,代码调用了DWA函数进行路径规划,并返回了路径和所有参数。
然后,代码绘制了整条路径和权重因子的变化。
DWA算法的优势在于它能够在考虑机器人运动学约束的情况下,通过动态窗口的方式进行路径规划。
它通过在速度和角速度的搜索空间中选择最优的速度和角速度,来避免碰撞并尽可能接近目标点。
这种方法可以在较短的时间内找到一条安全且有效的路径。
需要注意的地方包括:地图的设置需要符合实际情况,障碍物的位置需要正确标注,运动学限制和评价函数的参数需要根据实际情况进行调整。
这段代码中的独特算法主要是动态窗口法(DWA),它通过搜索速度和角速度的空间来选择最优的运动策略。
此外,代码中还使用了旋转操作来保证地图和预期设置的地图一致


















 832
832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









