









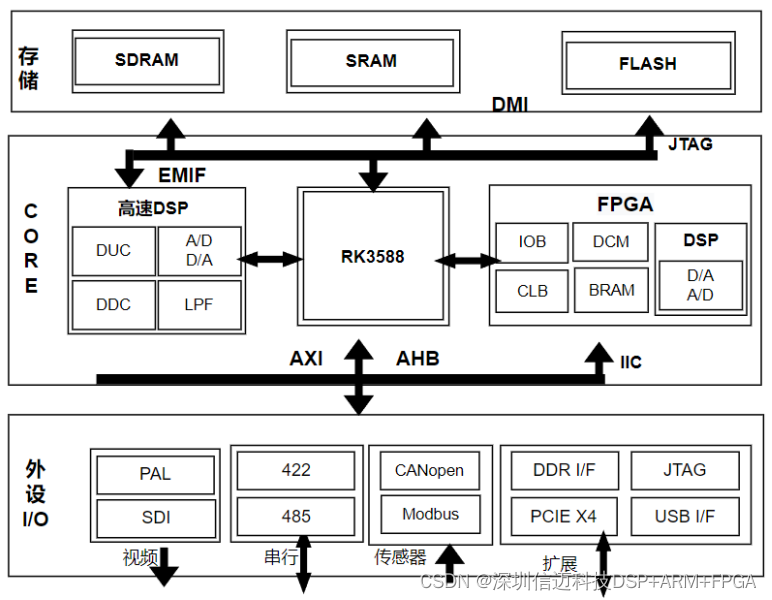
工业4.0驱动新一轮工业革命,核心特征是互联,进一步信息化、智能化是典型的特点。顺应工业4.0的需求,瑞芯微针对性地提供了HMI人机交互、信息采集及控制、以及AI视觉等解决方案,并广泛应用于工业各个领域。信迈科技发挥多年FPGA的优势,推出国产RK3588+DSP+FPGA+AI工业视觉主板解决方案。
一、功能需求
- 具备视频/图像解码单元、视频/图像编码单元、串口通信单元、视频缓存单元等;
- 能够完成图像采集、帧缓存、预处理、串口通信控制等功能;
- 能够完成图像增强、目标检测、目标跟踪等功能。
二、性能需求
- 能够实现对像素大小1920*1080(25帧/秒)的视频流数据进行实时处理;
- 支持深度卷积神经网络模型(如YOLO系列,Faster RCNN系列等)对视频数据的实时处理;
三、接口需求
- 视频图像输入接口:1组CameraLink base,1组HD-SDI
- 图像输出接口:1组PAL
- 控制及通信输入输出接口:1组422
- 硬件调试接口:FPGA—jtag,DSP/AI芯片—串口
- 输入电源:28V直流
- 网口要求:RJ45
RK3588 是一款低功耗、高性能的处理器,适用于基于 arm 的 PC 和 Edge 计算设备、个人 移动互联网设备等数字多媒体应用,采用 8nm 结构,将四核 Cortex-A76 和四核 Cortex-A55 分 别与 NEON 集成在一起。RK3588 支持 8K、60fps 解码,拥有高质量的 JPEG 编码器/解码器, 专业的图像预处理器,内置 GPU 可以完全兼容 OpenGLES 1.1、2.0 和 3.2。RK3588 引入了新 一代完全基于硬件的最大 4800 万像素 ISP,内置 NPU,支持 INT4/INT8/INT16/FP16 混合运算 能力,支持安卓 12 和 linux 系统。
瑞芯微 RK3588 功能框图
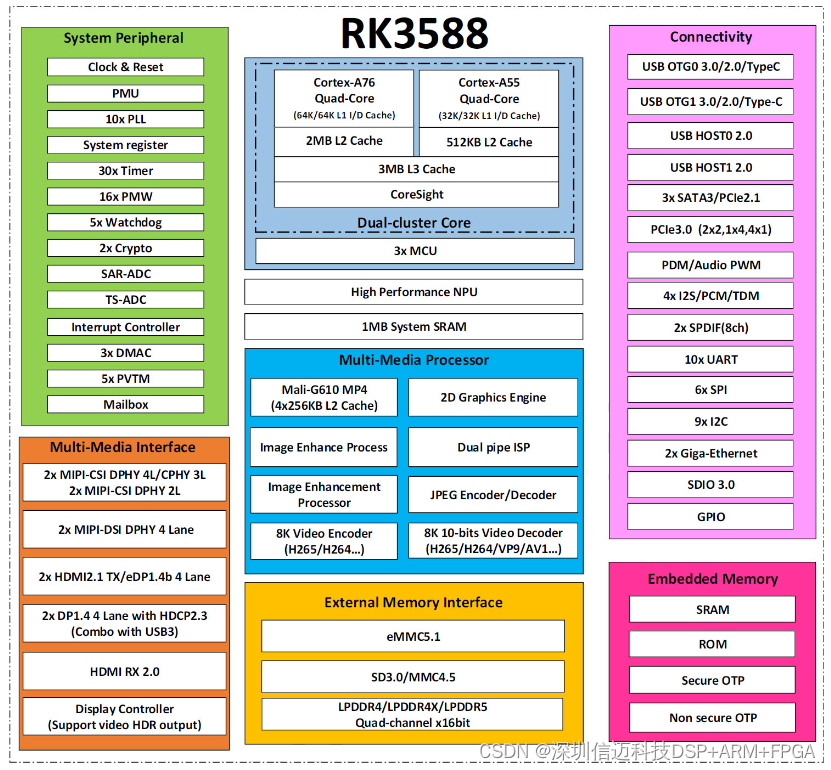
内置NPU 算力高达6T
内置NPU, 支持INT/INT8/INT16/FP16混合运算,运算能力高达6Tops。支持深度学习框架,基于TensorFlow/MXNet/PyTorch/Caffe等一系列框架的网络模型可以轻松转换,赋能各类AI场景。
8K编码+8K解码 多路视频源同编同解
iTOP-3568拥有强大的视频编解码能力,支持8K@60fps H.265/H.264/VP9/AV1视频解码和8K@30fps H.265/H.264视频编码,可以支持多达40多路1080P高清视频的同时解码,图像更清晰、细节更丰富。
多屏显示
RK3568可实现4屏显示, 支持真8K或双4K120Hz的显示能力,同样支持1080P高清图像,真正做到超高清、高帧率、多分辨率任意组合的多屏异显。可有效提高行业定制的拓展性。
多摄像头
RK3588集成4800万安防级别ISP、3F HDR 20bit、3D降噪、畸变矫正、宽动态对比度增强等技术,支持多摄像头接入,在智慧安防行业带来相当震撼的视觉体验。
超强的网络通讯能力
人工智能时代,更多设备需要稳定联网,迅为RK3588板载2路千兆以太网接口、WIFI与蓝牙二合一模块,支持4G模块、5G模块,保障数据传输的稳定性,为每台接入设备的稳定连接保驾护航。
显示接口
开发板显示接口支持2路HDMI_TX高清输出接口, 1路HDMI_RX高清输入,2路MIPI TX接口、1路EDP接口,支持多路8K视频输出和4K视频输入。
数据接口 超强联接
板载1路PCIe3.0、1路PCIe2.0,支持M.2固态硬盘和SATA硬盘,1路SATA3.0、1路USB3.0、3路USB2.0、1路TypeC接口,多接口,多需求,大满足。
瑞芯微工业级芯片产品除了拥有高扩展性、品质保障、可靠性及寿命保障等硬性优势外,还具有软件保障、强大的生态保障以及服务经验优势等雄厚的软实力,助力工业类应用需求的各类客户实现产品智能化升级。














 2007
2007











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









